传感器原理与应用yyq2.docx
《传感器原理与应用yyq2.docx》由会员分享,可在线阅读,更多相关《传感器原理与应用yyq2.docx(15页珍藏版)》请在冰豆网上搜索。
传感器原理与应用yyq2
传感器原理与应用
(二)
二、发电类传感器
1.热电偶
(1)原理
热电偶是应用热电效应制成的。
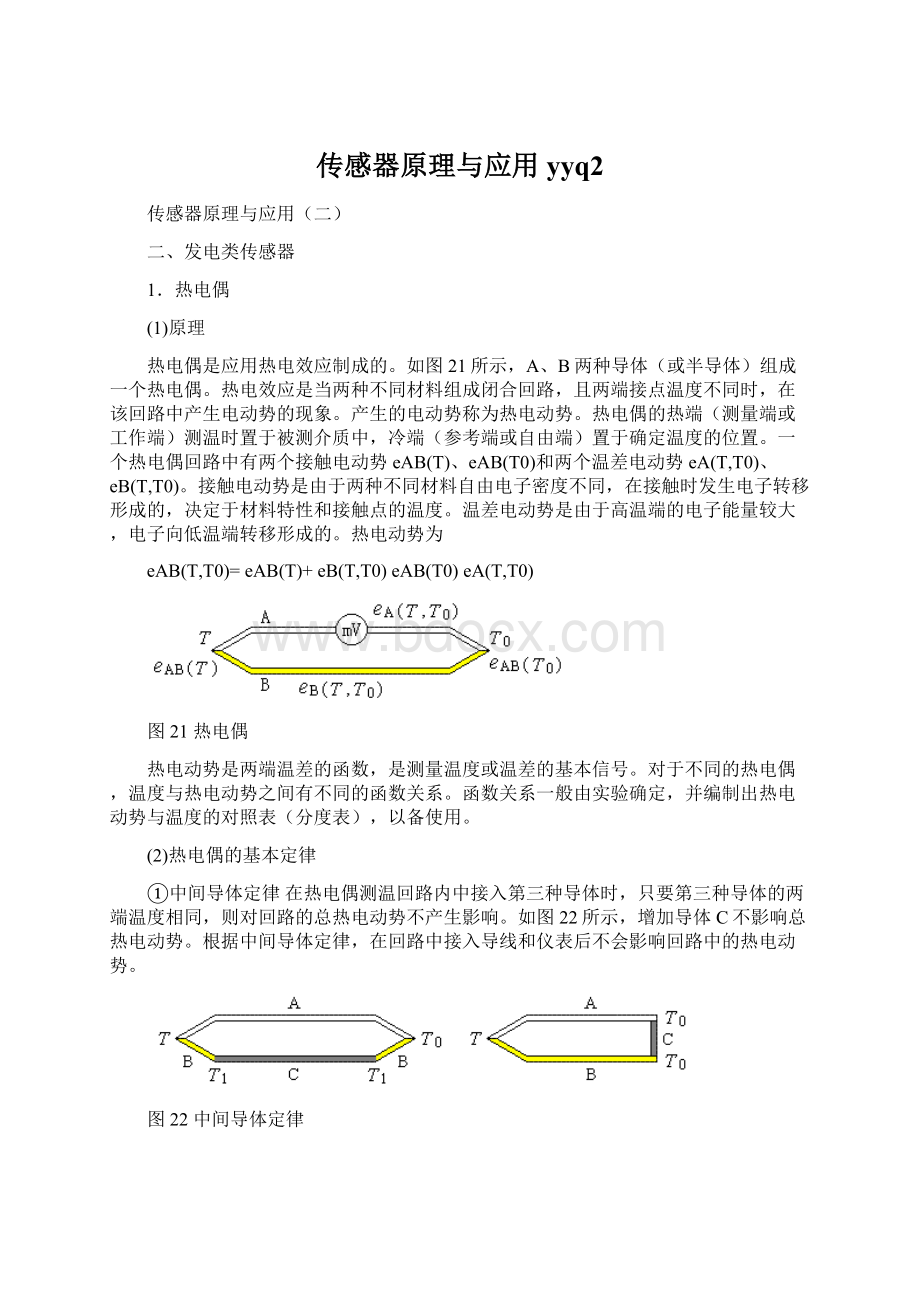
如图21所示,A、B两种导体(或半导体)组成一个热电偶。
热电效应是当两种不同材料组成闭合回路,且两端接点温度不同时,在该回路中产生电动势的现象。
产生的电动势称为热电动势。
热电偶的热端(测量端或工作端)测温时置于被测介质中,冷端(参考端或自由端)置于确定温度的位置。
一个热电偶回路中有两个接触电动势eAB(T)、eAB(T0)和两个温差电动势eA(T,T0)、eB(T,T0)。
接触电动势是由于两种不同材料自由电子密度不同,在接触时发生电子转移形成的,决定于材料特性和接触点的温度。
温差电动势是由于高温端的电子能量较大,电子向低温端转移形成的。
热电动势为
eAB(T,T0)=eAB(T)+eB(T,T0)eAB(T0)eA(T,T0)
图21热电偶
热电动势是两端温差的函数,是测量温度或温差的基本信号。
对于不同的热电偶,温度与热电动势之间有不同的函数关系。
函数关系一般由实验确定,并编制出热电动势与温度的对照表(分度表),以备使用。
(2)热电偶的基本定律
①中间导体定律在热电偶测温回路内中接入第三种导体时,只要第三种导体的两端温度相同,则对回路的总热电动势不产生影响。
如图22所示,增加导体C不影响总热电动势。
根据中间导体定律,在回路中接入导线和仪表后不会影响回路中的热电动势。
图22中间导体定律
②中间温度定律如图236所示,在热电偶测温回路中,热电极上某温度为T1,则总热电动势为T、T1的热电动势与T1、T的热电动势的代数和,即eAB(T,T0)=eAB(T,T1)+eAB(T1,T0)。
根据中间温度定律,可以将热电偶冷端延伸到温度恒定的地方。
图23中间温度定律
③标准电极定律图24中,如B为标准电极,则有eAC(T,T0)=eAB(T,T1)+eBC(T1,T0)。
根据标准电极定律,只要测得各种金属组成的热电偶的热电动势,则可计算出其中某两种金属热电偶的热电动势。
通常选用高纯铂丝作标准电极。
图24标准电极定律
④均质导体定律由两种均质导体组成的热电偶,其热电动势只与两种材料的性质及两端温度有关,而与热电偶的尺寸、形状及沿电极各处的温度分布无关。
均质导体定律可用于检验两个热电极材料成分是否相同及材料的均匀性。
(3)热电偶的结构
图25热电偶
(a)普通型(b)薄膜型
热电偶的结构见图25。
薄膜型热电偶的热端接点可以做得很小(μm级),具有热容量小、反应速度快(μs级)的特点,适用于微小面积上的表面温度以及快速变化的动态温度的测量。
(4)热电偶的特点和应用
铜-铜镍热电偶精度高、稳定性好、低温灵敏度高、价格低,适用于温度范围40℃350℃的测量;铜铬-铜镍热电偶稳定性好、灵敏度高、价格低,适用于温度范围40℃800℃的测量;铁-铜镍热电偶稳定性好、灵敏度高、价格低,适用于温度范围40℃750℃的测量;镍铬-镍硅热电偶抗氧化性能好,适用于温度范围40℃1200℃的测量;铂铑10-铂热电偶抗氧化性能好、稳定性好、价格高,适用于温度范围0℃1600℃的测量;铂铑10-铂铑6热电偶抗氧化性能好、稳定性好、价格高,适用于温度范围6000℃1700℃的测量。
(5)补偿导线与冷端处理
热电偶的长度一般只有为350mm2000mm。
为了把热电偶输出的电动势信号传输到远离现场的冷端温度稳定的控制室,需要接入补偿导线(图26中的
、
)。
图26补偿导线
将冷端放入0℃恒温器或装满冰水混合物的容器中,使其温度保持0℃是理想的做法。
如现场难以实现冷端温度保持为0℃,而保持T1,则应按eAB(T,0)=eAB(T,T1)+eAB(T1,0)修正。
对冷端温度还可采用电桥自动补偿。
如图27所示,在热电偶回路里串入不平衡电桥。
利用电桥输出的电压自动补偿因冷端温度不为0℃或发生变化时产生的热电动势偏差。
补偿电桥的桥臂电阻R1、R2、R3为电阻温度系数较小的锰铜丝电阻,R4为电阻温度系数较大的铜丝电阻。
补偿电桥与热电偶冷端置于同一温度的环境。
图27补偿电桥
(6)测量电路
热电偶测量电路见图28。
(a)是普通测温线路,(b)是带有补偿器的测温线路,(c)是带有温度变送器的测温线路,(d)是带有一体化温度变送器的测温线路。
图28热电偶测量电路
2.压电传感器
压电传感器的传感元件是压电材料,利用其压电效应实现从压力到电学量的转换。
(1)压电材料
大多数晶体材料都具有压电效应,但压电效应微弱,没有利用价值。
有利用价值的压电材料分为两类,即压电晶体和压电陶瓷。
①石英晶体石英晶体为单晶体结构。
其化学成分是SiO2。
如图29所示,天然石英晶体为正六面体。
石英晶体各个方向的特性是不同的。
纵向轴z称为光轴;经过六面体棱线并垂直于光轴的x称为电轴;同时垂直于x和z的y称为机械轴。
沿电轴x方向的作用力产生电荷的压电效应称为纵向压电效应;沿机械轴y方向的作用力产生电荷的压电效应称为横向压电效应;沿光轴z方向不产生压电效应。
图29石英晶体及切片
(a)晶体外形(b)切割方向(c)晶体切片
如图30所示,当切片沿电轴方向施加压力时,在与电轴垂直的平面上将产生电荷,其大小为
。
d11为x轴压电系数。
当切片沿机械轴方向施加压力时,也在与电轴垂直的平面上将产生电荷,其大小为
。
d11为y轴压电系数,a和b分别为沿切片y周方向的长度和宽度。
图30石英晶体压电模型
(a)不受力状态(b)x轴方向受压状态(c)y轴方向受压状态
②压电陶瓷压电陶瓷是人工制造的多晶体压电材料,如锆钛酸铅、铌镁酸铅等。
压电陶瓷内部是很多带有正负极性的电畴。
在没有外电场作用时,电畴无规则布,不表现极性;在外电场作用下,电畴定向偏转,表现出极性;外电场去掉后,留有剩余极性。
只有有剩余极性的材料才有压电效应。
有剩余极性的材料在外力作用下,电畴发生移动和偏转,极化程度再次发生变化,在垂直于外力方向的平面上的极化电荷随着发生变化。
这种因受力而产生的由机械效应转变为电效应,将机械能转变为电能的现象,就是压电陶瓷的正压电效应。
电荷量与外力保持正比关系,即
。
d33为压电陶瓷的压电系数。
压电陶瓷的压电系数比石英晶体的大得多。
采用压电陶瓷制作的压电传感器的灵敏度较高。
(2)压电传感器的连接和测量电路
单片压电元件产生的电荷量很小。
为了提高压电传感器的输出,实际应用中常采用两片或两片以上同型号的压电元件粘结在一起。
图31所示为两种基本连接方式。
并联的输出电量大,适用于缓慢变信号和以电荷量作为输出量的场合;串联的输出电压高,适用于以电压作输出信号和测量电路输入阻抗高的场合。
图31压电元件的连接
压电传感器本身的内阻抗很高,且输出能量较小。
因此,压电传感器的测量电路需要接入一个高输入阻抗前置放大器。
其作用是放大传感器输出的微弱信号,并进行阻抗变换。
用于电压放大器、电荷放大器的测量电路分别见图32(a)、(b)。
图中,ua、qa是压电传感器的输出电压、输出电量,Ca是压电传感器电容,Cc是传输电缆的电容,Cf是运算放大器的反馈电容,uo是输出电压。
图32压电传感器的测量电路
(3)压电传感器的应用
压电传感器简单、可靠,常用于力、压力、加速度的测量。
由于外力作用在压电材料上产生的电荷只有在没有泄漏的情况下才能保存,这就要求测量回路具有无限大的输入阻抗,当然是不可能的。
因此,压电传感器不能用于静态测量。
压电材料在冲击力或交变力的作用下,将有突变的或连续的输出,故压电传感器适用于动态测量。
3.霍尔传感器和磁敏传感器
霍尔传感器属于磁敏传感器。
其基本原理是半导体材料中的自由电子或空穴在磁场的作用下改变运动方向,从而输出信号。
常用的霍尔材料有锑化铟、砷化铟等。
霍尔传感器可用于交、直流两用钳型电流表、接地故障检测仪、接近开关等领域。
(1)霍尔效应和霍尔元件
图33所示为一N型半导体的霍尔元件片。
在其电路端接通直流电源时产生从右向左的电流,电子则从左向右运动。
如没有外磁场,电子将沿虚线作直线运动;如施加往里的磁场,电子受到磁场力向下方偏转,输出面上积累负电荷,另一输出面上积累正电荷。
输出面上积累正、负电荷后,电子又受到相反方向,即从下向上的电场力的作用。
当电场力与磁场力相等时,达到动态平衡状态,霍尔元件片输出稳定的霍尔电压。
电子受到的电场力和磁场力分别为FE=qEH和FM=qvB。
q是电子电量、EH是霍尔元件片内从上向下的霍尔电场的强度、v是电子速度的水平分量、B是外加磁感应强度。
当FE=FM时,qEH=qvB。
由此求得EH=vB。
设霍尔元件片的宽度和厚度分别为b和d,则流过霍尔元件的电流为
式中,n是电子浓度,dl是水平方向的元长度。
最后求得霍尔电压为
式中,
,称为霍尔元件的霍尔系数;
,称为霍尔元件的灵敏度。
显然,霍尔元件越薄,则其灵敏度越高。
图33霍尔效应
P型半导体的霍尔元件片有相似的霍尔效应。
以上分析表明,霍尔电压与控制电流、控制磁场强度、霍尔元件的几何尺寸以及材料性质有关。
霍尔电压与控制电流之间基本保持线性关系。
霍尔电压与磁感应强度之间,当B<0.5T时也保持线性关系;当B>0.5T时,由于材料磁性能受到磁感应强度的影响,表现出不同的非线性。
霍尔元件的内阻随着磁感应强度增大而增大。
这是由于随着磁感应强度增大霍尔元件内载流子偏转加剧,电流路径变长的缘故。
为此,应设有补偿环节。
霍尔元件一般为4mm×2mm×0.1mm的半导体薄片。
其长度方向输入控制电流,用红色引线;宽度方向输出电压,用绿色引线。
(2)霍尔传感器的测量电路
霍尔元件可以并联使用也可以串联使用,可以采用直流控制也可以采用交流控制。
直流控制输出直流电压,交流控制输出交流电压。
并联直流控制方式和串联交流控制方式的基本测量电路见图34。
图34霍尔传感器的基本测量电路
(a)并联直流控制方式(b)串联交流控制方式
霍尔传感器的几种测量电路见图35。
图35霍尔传感器的测量电路
(a)和(b)晶体管输出(c)晶闸管输出(d)和(e)与非门输出
霍尔元件的温度性能不好,影响其工作的稳定性。
为此,可采用以下方法予以补偿:
①在输入回路串联电阻利用串联电阻上的压降,补偿由于温度升高时输出电压的升高;
②利用恒流源控制克服霍尔元件的输入电阻随温度变化的影响;
③选择适当的负载电阻合适的负载电阻能使霍尔元件输出电阻随温度的变化补偿输出电压随温度的变化;
④利用热敏电阻在输入回路或输出回路接入热敏电阻,补偿温度变化产生的误差;
⑤利用补偿电桥在输出回路里串入有热敏电阻的补偿电桥补偿温度变化引起输出电压的变化。
由于输出回路不对称或输入回路不对称引起的不等位电动势,由于接触不良和温度效应引起的寄生直流电动势,以及由于连接导线引起的自激电动势等,均可能使传感器产生零位误差。
为此,可采用图369所示的补偿方式。
图36零位误差补偿
(3)磁敏传感器
磁敏传感器的磁敏元件主要有半导体霍尔元件、半导体磁敏电阻、磁性体磁敏电阻、电磁感应式磁敏器件和磁敏晶体管。
半导体磁敏电阻也是利用磁场引起电流偏转使元件电阻增加的特性制成的。
如图37所示,它是在半导体中置入多根金属电极,将多个磁敏电阻串联起来以提高其阻值的半导体电阻元件。
因此,具有较高的灵敏度。
图37蛇形半导体磁敏电阻
磁性体磁敏电阻是采用坡莫合金等强磁材料制成的磁敏元件。
强磁材料有易磁化方向和难磁化方向。
在其薄膜的难磁化方向施加磁场时,内部电阻将发生变化。
这种传感器对弱磁场的灵敏度较高,但线性范围较窄。
电磁感应式磁敏器件属于磁电式传感器。
磁敏二极管的结构见图38。
P区与N区之间有一个较长的本征区;本征区的一面磨成光滑的无复合表面,另一面打毛成粗糙表面构成高复合区。
图38磁敏二极管
如图39(a)所示,无外界磁场作用时,当磁敏二极管加正向偏压后,大量的空穴从P区通过本征区进入N区,大量电子从N区通过本征区进入P区,形成正向电流。
如图39(b)所示,当磁敏二极管再受到外界正向磁场作用时,则电子和空穴向高复合区偏转,由于高复合电子与空穴复合快,电流减小。
如图39(c)所示,当磁敏二极管再受到外界反向磁场作用时,电子和空穴向本征区偏转,电流增大。
由此可见,利用磁敏二极管可实现磁电转换。
图39磁敏二极管原理
(a)无外界磁场作用(b)正向磁场作用(c)反向磁场作用
磁敏二极管的磁电特性和伏安特性见图40。
图40磁敏二极管的特性
(a)磁电特性(b)伏安特性
磁敏三极管的发射结与磁敏二极管相似,有放大作用。
4.磁电式传感器
磁电式传感器是利用电磁感应原理制成的传感器,也称作电动式或感应式传感器。
其输出功率大、性能稳定、工作频带多为101000Hz。
磁电式传感器可用于速度、位移、加速度等参数的检测。
由于输出功率大,磁电式传感器的测量电路简单。
磁电式传感器可直接输出到前置放大级或经积分电路、微分电路输出到前置放大级。
(1)动圈式磁阻传感器
动圈式磁电传感器分为线速度型传感器和角速度型传感器。
其原理结构见图41。
磁路中有永久磁铁产生固定的极性。
线速度型传感器和角速度型传感器线圈上的感应电动势分别为
和
式中,N为磁极下线圈的匝数,B为磁感应强度、l为线圈周长、S为线圈面积。
图41动圈式磁阻传感器
(a)线速度型(b)角速度型
(2)磁阻式磁阻传感器
磁阻式磁电传感器由永久磁钢及缠绕其上的线圈组成。
如图42所示,传感器在工作时线圈和磁钢都不动,由运动着的导磁性物体改变磁路的磁阻,增强或减弱磁场,使线圈内的感应电势发生变化。
磁阻式磁电传感器可用于转速、偏心量、振动等参数的测量。
图42磁阻式磁电转速传感器
(3)电磁感应式磁敏传感器
电磁感应式磁敏传感器的典型应用是图43所示的磁带检测器。
它能检测交流磁场,不能检测直流磁场。
图43磁带检测器
5.电磁检测
电磁检测是利用磁性材料的剩磁、矫顽力、磁导率与其强度、硬度、渗层深度、淬层深度、氰化深度之间存在确定的关系进行的检测。
钢材的剩磁与其硬度、渗碳深度的关系见图44。
检测的步骤是:
①给材料交变退磁,使其剩磁为零;
②使材料直流饱和磁化,随即去掉直流电源;
③经感应或霍尔元件测量剩磁BO,并比较输出;
④再给材料交变退磁,使其剩磁为零。
图44利用剩磁的检测
钢材的矫顽力与其硬度、淬层深度的关系见图45(a)。
检测的原理电路见图45(b);检测的步骤是:
①给材料直流饱和磁化;
②去掉直流电源;
③加反向电流去磁,完全抵消矫顽力HC,使霍尔元件输出为零;
④根据反向电流比较输出。
图45利用矫顽力的检测
(a)特性(b)原理电路
利用钢材的磁导率与其含碳量、淬层深度、氰化深度之间的关系的测量试件见图46(a)。
随着磁导率变化,线圈电感也发生变化。
其桥式测量电路见图46(b)。
图46利用磁导率的检测
(a)试件(b)测量电路
6.振弦传感器和振筒传感器
振弦传感器和振筒传感器是利用机械谐振,产生与固有频率相同的感应电动势的传感器。
此类传感器的优点是结构简单、结实、测量范围大、灵敏度高、测量线路简单,可用于测压力、压差、位移、扭矩、力、加速度、气体密度等参数的测量。
(1)振弦传感器
振弦类似琴弦,其振动频率决定于弦受到的张力。
如图47所示,长度l、质量m的振弦,在张力T的作用下,其固有频率为
图47振弦传感器
如果振弦切割磁场,振弦内将产生同频率的电动势。
电动势的频率与振弦张力之间有确定的关系。
输出频率可用数字频率计测定。
振弦用抗拉强度高、弹性模量大、磁性能和导电性能好、线膨胀系数小的含碳量高的含钨、含钛的材料制成。
直径0.050.25mm,长度因应用而异。
静止的振弦,必须激发才能起振,起振后必须提供能量才能维持。
有连续激发和间歇激发两种方式。
①连续激发如图48所示,接通电路时即发生自激振动,并通过正反馈电路定时给振弦提供电流以维持振动。
图48连续激发
②间歇激发如图49所示,振弦上装有两块软铁,软铁旁分别有铁心1、铁心2。
铁心1的线圈通脉冲电流激发;铁心2为永磁式极化铁心,其上线圈为输出线圈。
激发与输出可交替进行,省去一个磁铁和一个软铁。
图49间歇激发
为了克服非线性误差,应正确选取振弦的初始张力,使其工作在线性段,并采用差动式传感器。
(2)振筒传感器
振筒传感器以均匀薄壁圆筒(振筒)作为敏感元件,将被测气体压力或密度的变化转化成频率的变化。
振筒用弹性好、温度系数低的磁性材料制成。
壁厚0.070.12mm,其一端固定,另一端密封但可以自由运动。
受到激发后,筒壁发生径向振动,振幅沿切向正弦分布。
振筒的固有频率除了与筒的形状、大小、材料以及周围介质有关外,还与振筒内外压力差保持单值函数关系(见图50)。
输出频率可用数字频率计测定。
图50振筒传感器的频压特性
如图51所示,振筒、激励器、拾振器和放大器组成测量电路。
当放大器通电后,激励线圈流有一个小电流,振筒受该电流建立的磁场吸引发生振动。
同时,振筒的运动又改变了拾振器永久磁铁磁路中的磁阻,引起磁路中磁通的变化,从而在拾振器中产生感应电动势。
该电动势经放大器放大后,一部分输出频率信号,一部分反馈给激励器,补充振筒的阻尼损耗,维持振动。
图51振筒传感器的原理
7.气动传感器
气动传感器系统由气源装置、气动传感器、气电转换器和显示仪表组成。
(1)气电转换器
气电转换器种类很多。
其类型及基本原理如下:
①触点式转换器压力变化使膜片运动,带动触点状态发生变化;
②电感式转换器压力变化使铁心位移,引起电感量发生变化;
③热电阻式转换器流量变化引起热电阻温度发生变化,电阻值发生变化;
④光电式转换器流量变化使浮标运动,遮挡光线,实现光电转换;
⑤振动式转换器流量变化使膜片振幅发生变化,感应程度发生变化。
(2)气动传感器应用
气动传感器分为节流式气动传感器和射流式气动传感器。
节流式气动传感器是将气流经节流喷嘴、测量喷嘴等射向前方一定距离的被测件,依据压力、流量与前方距离之间的确定关系测量距离或相关参数的传感器。
节流压力式气动传感器的原理见图52。
图52节流压力式气动传感器
射流式气动传感器是利用气流受到不同障碍物遮挡后压力及压力分布发生变化的特征测量位移或相关参数的传感器。
射流式气动传感器的原理见图53。
图53射流式气动传感器
(a)层流中断式(b)长距离中断身(c)声波束式
 升级会员
升级会员 