弹性力学经典变分原理.pdf
《弹性力学经典变分原理.pdf》由会员分享,可在线阅读,更多相关《弹性力学经典变分原理.pdf(18页珍藏版)》请在冰豆网上搜索。
第第3章章弹性力学经典变分原理弹性力学经典变分原理3.1弹性力学基础弹性力学基础3.1.1变形分析变形分析要研究物体变形首先要研究其位移如何来描述。
在数学上,我们引进物质坐标和空间坐标的概念分别来描述物体上某一点的位置变动,具体说来,先取一Descarte坐标系做参照系,变形前物体的构形为B,其每个质点的位置可用一组我们称之为物质坐标的坐标值来表示;变形后物体的构形变成B,取另一个Descartes坐标系做参照系,我们称之为空间坐标系。
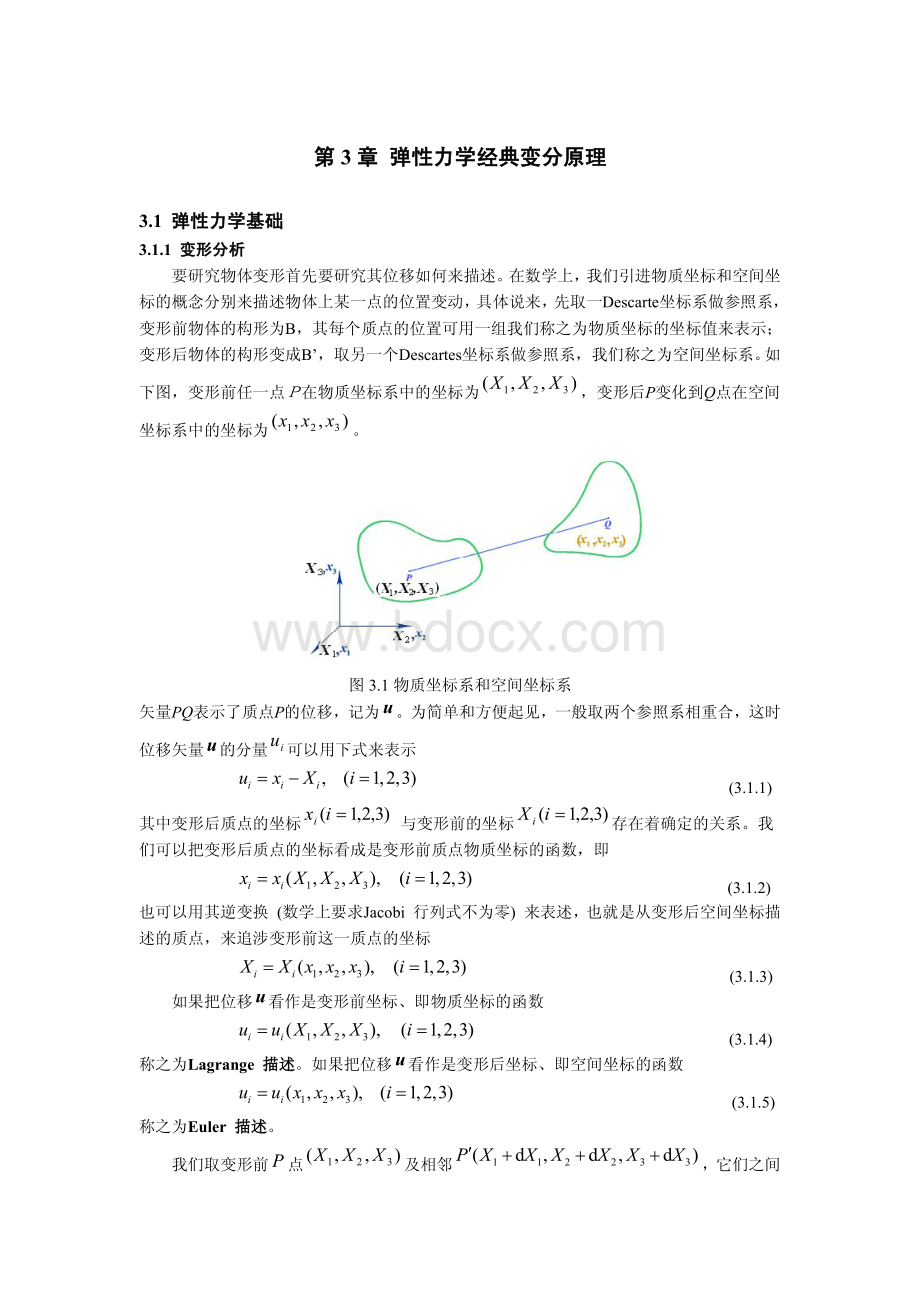
如下图,变形前任一点在物质坐标系中的坐标为),(321XXX,变形后P变化到Q点在空间坐标系中的坐标为),(321xxx。
图3.1物质坐标系和空间坐标系矢量PQ表示了质点P的位移,记为u。
为简单和方便起见,一般取两个参照系相重合,这时位移矢量u的分量iu可以用下式来表示,(1,2,3)iiiuxXi(3.1.1)其中变形后质点的坐标)3,2,1(ixi与变形前的坐标)3,2,1(iXi存在着确定的关系。
我们可以把变形后质点的坐标看成是变形前质点物质坐标的函数,即123(,),(1,2,3)iixxXXXi(3.1.2)也可以用其逆变换(数学上要求Jacobi行列式不为零)来表述,也就是从变形后空间坐标描述的质点,来追涉变形前这一质点的坐标123(,),(1,2,3)iiXXxxxi(3.1.3)如果把位移u看作是变形前坐标、即物质坐标的函数123(,),(1,2,3)iiuuXXXi(3.1.4)称之为Lagrange描述描述。
如果把位移u看作是变形后坐标、即空间坐标的函数123(,),(1,2,3)iiuuxxxi(3.1.5)称之为Euler描述描述。
我们取变形前P点),(321XXX及相邻112233(d,d,d)PXXXXXX,它们之间的长度平方为3201dddiiisXX(3.1.6)它们变形后相应的Q点),(321xxx及相邻112233(d,d,d)Qxxxxxx,其长度平方为321dddiiisxx(3.1.7)根据变形前后的坐标关系有3311dd,ddiiijjjjjjxXxXXxiXx从而有33220,11dd()ddijijijijxxssXXXX(3.1.8)或者33220,11dd()ddijijijijXXssxxxx(3.1.9)如果定义3121ijijijxxEXX(3.1.10)及3121ijijijXXxx(3.1.11)则有220dd2ddijijssEXX(3.1.12)220dd2ddijijssxx(3.1.13)上述表达式中,有重复下标的,ij,已省略了相应的求和记号3311,ij,称为Einstein约定。
我们称ijEE为Lagrange-Green应变张量(用Lagrange坐标系来描述),把ij称作为Euler-Almansi应变张量(用Euler坐标系来描述)。
如果我们在Lagrange坐标系中,沿着某一个特定的坐标方向取一个微分单元1123d(d0,dd0)XXXR,其变形前长度为01ddsX而变形后的长度为110d12dsEs因此,该微段变形前后的相对伸长量为01110dd121dssEEs(3.1.14)可见11E与线元的相对伸长有关。
当111E时,111EE。
如果在Lagrange坐标系中沿坐标轴方向取两个相互垂直的微元,分别为11d(d,0,0)XR和22d(0,d,0)XR,它们的长度分别为011022dd,ddsXsX那么在变形后它们长度1ds和2ds分别为1111d12dsEX(3.1.15)2222d12dsEX(3.1.16)变形后两个微段对应向量的内积为1212121212cosdddd2ddkkxxssXXEXXXX112212kkxxEXX(3.1.17)其中为变形后两个微段之间的夹角。
所以1212121211222dd2cosdd1212EXXEssEE(3.1.18)如果记变形前后两个微元之间夹角的变化(减少)为,也就是说2(3.1.19)那么1211222sincos1212EEE(3.1.20)当11221,1EE时,可以表示为12122,/2EE(3.1.21)所以说,12E是与剪切变形有关的量。
如果用空间坐标系来描述变形,也就是说,位移矢量u的分量iu用变形后的坐标来描述1,23(,),(1,2,3)iiiiiuxXxXxxxi1,23(,),(1,2,3)iiiiiXxuxuxxxi那么312131213121ijijijijijijjijiijXXxxuuxxuuuuxxxx(3.1.22)在小变形情况下,如果忽略高阶小量后,那么有12jiijjiuuuu(3.1.23)我们称之为Cauchy微小应变。
在工程上描述的应变为xux,yvy,zwzywzvyz,xvyuxy,zxuwzx把他们写成矩阵的形式为000000000Txyzyzzxxyxzyuvyzxwzyx(3.1.24)也就是()TEu(3.1.25)其中TuvwuTxyzyzzxxy000()(,)000000xzyxyzyzxzyxE=E式中代表梯度算子xyzijki,j,k代表zyx,方向的单位向量。
3.1.2应力分析应力分析图3.2物体受力如图所示,通常作用于物体的外力可以分为两种:
一种是分布在物体表面的作用力,例如一个物体对另一物体作用的压力,象水压力等,我们称之为面力(surfacetraction);另一种是分布在物体体积内部的力,象重力、磁力或运动物体的惯性力等,我们称之为体力(bodyforce)。
图3.3内力和应力当一个物体处于平衡状态时,假如我们设想从中分离出一部分B,其表面用S表示。
S上任意一点,其邻域S面上作用的合力为F,应力0limSSFp正应力剪应力截面上应力,()p与截面法向有关。
当取定坐标系统xoy后,可以用每个坐标面上的沿坐标轴的三个应力分量来表示应力状态。
根据剪应力互等定律,其中独立的分量有6个,我们记为应力张量(满足坐标变换规律)xxyxzijyxyyzzxzyz,zyyzzxxzyxxy,(3.1.26)应力的符号规则:
外法线方向与坐标轴方向一致的截面上,沿坐标轴正方向的应力为正,沿坐标轴负方向的应力为负;反之,外法线方向与坐标轴方向相反的截面上,沿坐标轴正方向的应力为负,沿坐标轴负方向的应力为正。
3.1.3截面上应力截面上应力在某一个外方向(,)Txyznnnn的截面上,根据力的平衡关系,截面上应力p沿三个坐标轴上的应力分量为31,1,2,3iijjjpni也就是说xxxxyyxzzpnnnyyxxyyyzzpnnnzzxxzyyzzpnnn图3.4应力张量与截面上应力写成矩阵形式为000000000xyxxzyzyyzxyzzzyxzxxypnnnpnnnpnnn(3.1.27)也就是说()pEn(3.1.28)式中TxyzppppTxyzyzzxxy()En就是将()E中的梯度矢量替换成截面的法向单位矢量n,即000()000000xzyyzxzyxnnnnnnnnnEn(3.1.29)3.1.4平衡方程平衡方程应力分量在物体内部的平衡方程为3,10,1,2,3ijjijfi(3.1.30)写成分量的形式为0xzxxyxfzyx0yyzyxyfzyx0zzyzzxfzyx其中zyxfff,分别是体积力在zyx,轴上的分量。
如果把平衡方程表示成矩阵的形式为0000000000xyxzyyzzzxxyxzyffyzxfzyx也就是()0Ef(3.1.31)式中Txyzffff3.1.5应变能、余应变能及应力与应变关系应变能、余应变能及应力与应变关系物体发生弹性变形时,外力所做的功等于物体中所储存的应变能。
而这种应变能与物体的变形过程无关,只同物体的最终变形状态有关,也就是说只与最终的应变有关。
我们在物体中隔离出一个微元dddxyz。
该微元上的应变分量为xyzxyzzyx,,作用微元表面上的应力分量为xyzxyzzyx,。
记物体的应变能密度为U(也就是单位体积的应变能),那么储存在该微元上的应变能为dddUxyz。
根据前面的说明,应变能密度U应该是应变分量xyzxyzzyx,的函数。
如果此时微元的应变有一个微小变化xyzxyzzyx,,相应的应变能密度也有了一个微小的变化U,根据能量守衡,有xyxyzxzxyzyzzzyyxxU从中我们可以得到xxU,yyU,zzUyzyzU,zxzxU,xyxyU写成矩阵的形式为TU(3.1.32)TU用积分形式表示为dddddddTxxyyzzyzyzzxzxxyxyU通过下式定义的是余应变能密度VUVxyxyzxzxyzyzzzyyxx(3.1.33)也就是说xyxyzxzxyzyzzzyyxxVU(3.1.34)写成矩阵的形式有TVU(3.1.35)用积分形式表示为dddddddTxxyyzzyzyzzxzxxyxyV利用应力与应变之间的关系,可以把上式右边表示成应力的形式,也就是说把V表示成应力分量xyzxyzzyx,的函数。
对上式取变分,有TTTTVU(3.1.36)因此有TV(3.1.37)图3.5应变能和余应变能密度上面这些关系对于线弹性变形和非线性弹性变形都是适用的。
对于非线性的弹性变形,U和V不仅在数学形式上不一样,而且在数值也不相等。
对于线弹性变形,应力和应变之间关系是线性的,应变能密度U和应变余能密度V数值上相等12TUV(3.1.38)如果应力和应变之间的关系表示为Aa那么U和V可以表示成12TUA(3.1.39)12TVa(3.1.40)由于能量的正定性,A和a都必须是对称正定的六阶矩阵,而且它们之间互为逆矩阵,也就是说AaI这里I是六阶单位矩阵。
3.1.6边界条件边界条件在弹性力学的定解问题中,除了必要的微分方程外,还需要给定合适的条件。
这种边界条件是多种多样的,我们这里只讨论两种典型的情况,即给定位移的位移边界和给定面力的应力边界。
记B为物体的总边界,我们可以把总边界分成两部分12B=B+B。
其中1B上有位移边界条件u=u(3.1.41)2B上有应力边界条件()En=p(3.1.42)其中TuvwuTxyzpppp分别是边界1B上给定的位移向量和2B上给定的单位面积上外力向量。
图3.6边界条件3.1.7几何可能位移和静力可能应力几何可能位移和静力可能应力几何可能位移几何可能位移:
在位移边界1B上满足位移边界条件u=u,且在整个区域内满足连续条件(可以得到相应的应变)的位移称为几何可能位移几何可能位移,一般用ku来表示。
静力可能应力静力可能应力:
在应力边界2B上满足应力边界条件()En=p,且在整个区域内满足应力平衡条件()0E+f=的一组应力称为静力可能应力静力可能应力,一般用s来表示。
3.1.8弹性力学精确解弹性力学精确解弹性力学的精确解u,应满足下列微分方程和边界条件
(1)几何关系()TEu,内
(2)平衡方程()0Ef,内(3)本构关系TU或者TV,内(4)边界条件()En=p,2B上u=u,1B上3.2一个重要的恒等式一个重要的恒等式对于三维空间上任意一个连通区域,始终成立下面的恒等关系恒等关系()d()d()dTTTTBBEuEnuEu(3.2.1)其中B是区域的边界,(,)Txyznnnn是边界B上的外法线方向,3uR和6R是两组任意独立的函数,式中000()000000xzyyzxzyxE000()000000xzyyzxzyxnnnnnnnnnEn写成分量的形式为333,1,1,1dddijijijjiijjiijijijBunuBu证明证明:
123()xyzEEEE123()xyznnnEnEEE其中123,EEE是三个常数矩阵。
12310000000000100001
 升级会员
升级会员 