机械原理课程设计步进式送料机.docx
《机械原理课程设计步进式送料机.docx》由会员分享,可在线阅读,更多相关《机械原理课程设计步进式送料机.docx(9页珍藏版)》请在冰豆网上搜索。
机械原理课程设计步进式送料机
机械原理课程设计说明书
设计题目:
步进式送料机
学院:
机械工程学院班级:
09机制四班姓名:
宋海龙
********
日期:
第一章课程设计内容··························31.1设计题目·································31.2设计任务·································41.3设计提示·································4第二章工作原理······························52.1送料机工作原理························52.2传动机构:
常用传动机构的基本特征·······52.3传动机构的选择························62.4执行机构的选择························82.5动力源的选择及相应参数················9第三章构件的运动分析及尺寸的确定············93.1执行机构的运动轨迹····················93.2连杆机构的分析及尺寸的确定·············103.3蜗轮蜗杆参数的确定····················113.4齿轮参数与尺寸的确定··················12第四章连杆机构运动简图及运动分析············134.1连杆机构运动简图······················134.2运动分析······························14第五章运动循环图····························15第六章机构运转的整体流程····················15参考文献·······································17
第一章课程设计内容
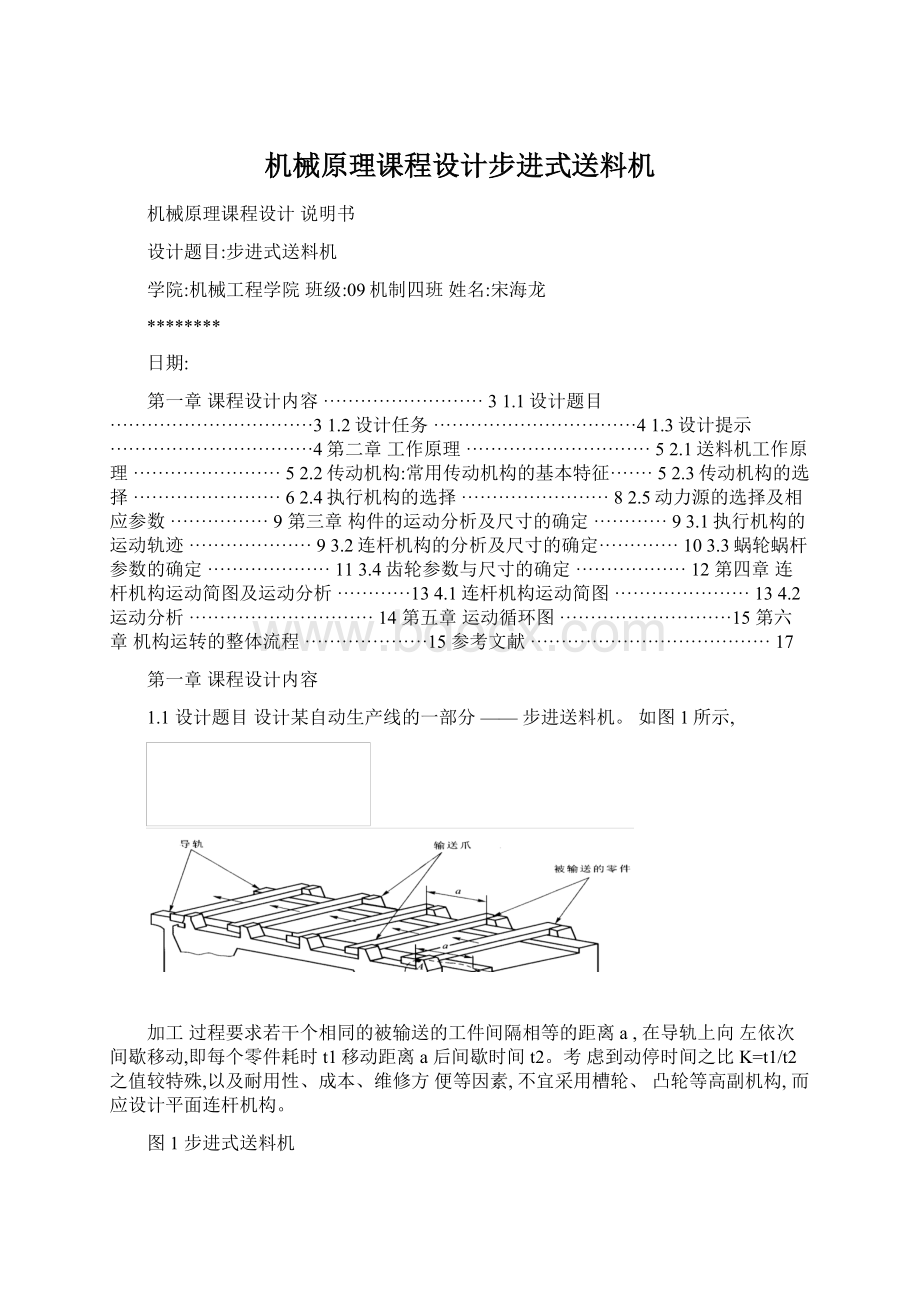
1.1设计题目设计某自动生产线的一部分——步进送料机。
如图1所示,
加工过程要求若干个相同的被输送的工件间隔相等的距离a,在导轨上向左依次间歇移动,即每个零件耗时t1移动距离a后间歇时间t2。
考虑到动停时间之比K=t1/t2之值较特殊,以及耐用性、成本、维修方便等因素,不宜采用槽轮、凸轮等高副机构,而应设计平面连杆机构。
图1步进式送料机
具体设计要求为:
1、电机驱动,即必须有曲柄。
2、输送架平动,其上任一点的运动轨迹近似为虚线所示闭合曲线(以下将该曲线简称为轨迹曲线。
3、轨迹曲线的AB段为近似的水平直线段,其长度为a,允差±c(这段对应于工件的移动;轨迹曲线的CDE段的最高点低于直线段AB
的距离至少为b,以免零件停歇时受到输送架的不应有的回碰。
(有关数据见表1.1
4、在设计图中绘出机构的四个位置,AB段和CDE段各绘出两个位。
需注明机构的全部几何尺寸。
表1
方案号acbt1t2/mm/mm/mm/s/s
F400205524
1.2设计任务
1.步进送料机一般至少包括连杆机构和齿轮机构二种常用机构。
2.设计传动系统并确定其传动比分配。
3.图纸上画出步进送料机的机构运动方案简图和运动循环图。
4.对平面连杆机构进行尺度综合,并进行运动分析;验证输出构件的轨迹是否满足设计要求;求出机构中输出件的速度、加速度;画出机构运动线图。
5.编写设计计算说明书。
1.3设计提示
1.由于设计要求构件实现轨迹复杂并且封闭的曲线,所以输出构件采用连杆机构中的连杆比较合适。
2.由于对输出构件的运动时间有严格的要求,可以在电机输出端先采用齿轮机构进行减速。
如果再加一级蜗杆蜗轮减速,会使机构的结构更加紧凑。
3.由于输出构件尺寸较大,为提高整个机构的刚度和运动的平稳性,可以考虑采用对称结构(虚约束。
第二章工作原理
2.1送料机工作原理
图1为步进送料机的原理图。
电动机通过传动装置驱动滑架往复移动,工作行程时滑架上的推爪推动工件前移一个步长,当滑架返回时,四杆机构运动使推爪得以从工件底面滑过,工件保持不动,当滑架再次向前推进时,推爪已复位,向前推动新的工件前移,前方推爪也推动前一工位的工件前移。
其传动装置常使用减速器,有时也用其它传动装置。
2.2传动机构:
常用传动机构的基本特征
连杆机构的特点:
1.其运动副元素为面接触,压力较小,承载能力较大,润滑好,磨损小,加工制造容易,且连杆机构中的低副一般是几何封闭,对保证机构的可靠性有利。
2.在连杆机构中,在原动件的运动规律不变的条件下,可用改变各机构的相对长度来使从动件得到不同的运动规律。
3.在连杆机构中,在连杆上各点的轨迹是各种不同的形状的曲线,其形状随着各构件的相对长度的改变而改变,故连杆曲线的形式多样,可用来满足一些特定的工作需要。
4.利用连杆机构还可以很方便地改变运动的传递方向,扩大行程,实现增力和远距离传动等目的。
图2四杆机构
齿轮机构的特点:
齿轮机构是在各种机构中应用最为广泛的一种传动机构。
它依靠轮齿齿廓直接接触来传递空间任意两轴间的运动和动力,并具有传递功率范围大,传动功率高,传动比准确,使用寿命长,工作可靠等优点。
2.3传动机构的选择
考虑到动停时间之比K=t1/t2之值较特殊,以及耐用性、成本、维修方便等因素,不宜采用槽轮、凸轮等高副机构,故采用应平面连杆机构和齿轮机构。
鉴于传动机构的特点,我们小组提出了四种方案:
方案1:
采用凸轮摇杆机构
该凸轮机构虽然能实现工件的移动,但不满足设计要求的输送爪的运动轨迹,所以该方案舍弃。
方案3:
采用齿轮与齿条的配合
型号:
Y132M2-6功率:
7.5KW频率:
50HZ电压:
380V电流:
15.6A接法:
△转速:
960r/min
第三章构件的运动分析及尺寸的确定
由机械原理课本四连杆运动轨迹图谱可查得,杆a、b、b’c、d长度比例为:
1:
5:
2.5:
4:
3
a杆与该机构的平动轨迹的长度比为1:
5.
因为输出机构要满足题目要求的轨迹,
表2
方案号acbt1t2/mm/mm/mm/s/s
F400205524
即平动轨迹要求长度为400mm,根据查表来的比例数据可得各个杆的长度为:
表3
杆号abb‘cd
杆长(mm80400200320240
3.3蜗杆参数的确定
由蜗杆的分度圆直径预期模数的匹配标准系列可知:
模数为2的时候,分度圆直径可选为22.4。
表4
主要参数齿数z1模数压力角分度圆直径
数值122022.4
蜗轮2,3的参数的确定
表5
主要参数齿数z1模数压力角分度圆直径
数值60220120
由以上参数可知该减速机构的传动比为z2/z1=60
3.5齿轮参数与尺寸的确定
由方案可知:
输出构件每分钟循环运动的次数为:
60/(2+4=10次
根据齿轮的标准模数系列表:
表6
第1系列
11.251.522.5345681012162025324050
第2系列
1.752.252.75(3253.5(3.754.55.5(6.579(1114182228
3645
可得
由于6,7齿轮与蜗轮2,3连在同一轴上,所以这两个齿轮的转速w与蜗轮的转速一致。
齿轮1与4,,6与7为对称齿轮,两两完全相同,所以
该直齿圆柱齿轮组的参数为
表7
主要参数齿数模数压力角分度圆直径齿轮1,48012080齿轮6,75012050
动力由6,7齿轮传动到1,4齿轮上,传动比为80/50=1.6所以齿轮1,4的转速w=960r/min/60/1.6=10r/min
即在一分钟内,齿轮1和4转动10周,所以连杆a也转动10周,即该连杆机构循环运动10周,等于设计要求的转速。
故该传动系的设计是合理且符合要求的。
第四章连杆机构运动简图及运动分析
4.1连杆机构运动简图
图11机构运动简图
4.2运动分析如图11所示
⑴系统总传动比i=(960·2л/60X(60/10·2л=96⑵曲柄连杆机构杆件尺寸
E1E2=400mmEE’’=50mmw2=2*3.14*10/60=1.05rad/sK=(180。
+θ/(180。
—θ=t1/t2=2=>θ=60。
E1E22=AE12+AE22-2AE1AE2cos60。
AE1=2BC-ABAE2=2BC+AB4BC2+3AB2=E1E22
DE-DE’’=EE’’
DE’’=(AE’’2-AD’’21/2DE=(BE2-BD21/2AE’’=AB+2BCAD=AB+BDBE=2BC令AB=80mm
=>BC=180mmBD=25mm
(3输出点在E点时的速度(uv=0.0021m/s/mm
VE=VB+VEB;
VB=ω2·AB=1.05*0.08=0.084m/s
VE=0.0021*pb=0.0021*40=0.1115m/s
(4输出点在E’是的加速度(ua=0.00105m/s2/mm
aE’=anB+atB+anE’B+atE’B
其中atB=0,anEB=0,anB=ω22*AB=1.05^2*0.008=0.0693m/s2aE’=0.00105*p’a’=0.00105*83=0.07349m/s2
第五章运动循环图
图12运动循环图
第六章机构运转的整体流程
电动机转动蜗杆转动蜗轮2、3转动齿轮1、4齿轮6、7连杆a转动连杆b、c转动执行构件输送爪运动图12机构运动的整体流程
参考文献【1】孙桓,陈作模.机械原理[M].北京:
高等教育出版社,2005【2】裘建新(主编)机械原理课程设计指导书·高等教育出版社2007年11月【3】李学荣,朱桥等(编制)连杆曲线图谱(第一版)重庆出版社1993年【4】张卫国饶芳(主编―机械设计基础篇华中·科技大学出版社2006·9【5】王为汪建晓(主编吴昌林(主审―机械设计·华中科技大学出版社2007·2【6】宋昭祥(主编―机械制造基础·机械工业出版1998·10
 升级会员
升级会员 