21基于非定常自由尾迹的直升机轴间耦合响应计算与验证李攀陈仁良12doc.docx
《21基于非定常自由尾迹的直升机轴间耦合响应计算与验证李攀陈仁良12doc.docx》由会员分享,可在线阅读,更多相关《21基于非定常自由尾迹的直升机轴间耦合响应计算与验证李攀陈仁良12doc.docx(18页珍藏版)》请在冰豆网上搜索。
21基于非定常自由尾迹的直升机轴间耦合响应计算与验证李攀陈仁良12doc
第二十八届(2012)全国直升机年会论文
基于非定常自由尾迹的直升机轴间耦合响应计算与验证
李攀陈仁良
(南京航空航天大学直升机旋翼动力学国家级重点实验室,南京,210016)
摘要:
直升机机体非定常运动诱导的旋翼尾迹动态畸变将改变桨盘诱导速度分布,对轴间耦合响应有重要影响,增加了准确预测轴间耦合响应的难度。
本文建立了非定常自由尾迹/旋翼/机体耦合的配平和动态响应计算方法,以计入尾迹动态畸变和气动干扰对直升机动态响应的影响。
计算结果表明,本文建立的计算方法能准确预测俯仰或滚转机动状态孤立旋翼和直升机的异轴响应,基本解决了“异轴响应反号”问题。
关键词:
直升机;飞行动力学;轴间耦合响应;尾迹;非定常
1引言
飞行品质已成为现代直升机的主要设计指标之一[1]。
目前,飞行品质评估主要包括三种技术手段:
计算分析、飞行仿真和试飞,其中计算分析和飞行仿真的准确度都依赖于飞行动力学模型的置信度。
先进的飞行控制系统作为提高直升机飞行品质的主要手段之一,其设计过程也是以飞行动力学模型为前提[2]。
因此,建立高置信度的直升机飞行动力学模型是进行飞行品质分析和设计的基础和关键。
长久以来,国内外直升机工程界和学术界建立了多种直升机飞行动力学模型[3-11],不断的提高其置信度。
早期的模型已能有效预测直升机中等速度平飞状态的飞行特性,但对低速飞行和机动飞行状态的预测精度较低,尤其是轴间耦合响应预测精度难以达到工程精度要求。
例如,对于直升机俯仰或滚转机动时异轴响应的预测,计算结果往往出现与飞行试验结果符号相反的现象,即著名的“异轴响应反号”问题。
“异轴响应反号”问题曾长期困扰各国研究者,始终未能找到一个令人信服的物理解释。
自90年代中期以来,“异轴响应反号”问题成为了直升机飞行动力学界的研究热点,各国的研究人员对此问题给出了多种物理解释[12-14],但这些解释或无法令人信服,或只能一定程度上提高异轴响应的预测精度,都未能从根本上阐明其主要的物理成因。
具有突破性的认识属于以色列的Rosen和Isser[15-18],1995年,他们发现旋翼作俯仰或滚转角运动时将引起旋翼尾迹几何形状产生变化,改变旋翼桨盘诱导入流分布,并通过算例说明忽略这一因素是导致“异轴响应反号”现象的主要原因。
同时,Keller[17]利用弯曲涡管尾迹模型推导出了悬停状态尾迹弯曲畸变引起的桨盘入流梯度与旋翼俯仰或滚转角速率之间的正比系数,Kr=1.5。
随后,Barocela[18]、Krothapalli[19]和Zhao[20]等定义了一个尾迹弯曲参数Kre,即桨盘入流梯度与尾迹弯曲曲率之间的正比系数,并采用简单的、预定形状的尾迹模型分别对Pitt-Peters和Peters-He动态入流模型进行了增广。
其中Zhao还基于动态涡管尾迹模型提取出了尾迹弯曲、倾斜和拉伸畸变的时间常数,利用一组一阶微分方程来描述尾迹畸变的动态特性。
Barocela、Krothapalli和Zhao等人的研究工作可以说是对动态入流模型进行的尾迹弯曲畸变效应的局部修正。
此类方法尽管简单可行,但由于采用了简单的、预定的尾迹模型(如弯曲涡管、涡环等),不能充分体现尾迹的所有畸变形式;同时,过于简单的处理了尾迹畸变与桨盘诱导入流之间的关系(正比关系,Kre),因此其通用性受到了质疑。
例如,文献[21-22]中均指出尾迹弯曲参数Kre的取值与飞行状态(前进比、拉力系数、俯仰或滚转角速率等)相关;文献[22]还指出,Kre还与旋翼的设计参数也相关。
在Zhao对UH-60直升机操纵响应的研究中也表明[20],为了使异轴响应与飞行试验结果吻合,在悬停状态Kre需要取2.0,而在前飞状态需要取1.0。
目前,尾迹弯曲参数Kre的取值问题仍未有明确的方法,限制了动态入流模型的通用性[22]。
随着计算机速度的不断发展以及旋翼自由尾迹分析方法的不断完善,将自由尾迹模型作为旋翼诱导入流模型应用于直升机飞行特性分析已成为可能。
自由尾迹模型允许旋翼尾涡以当地气流速度自由运动,不仅能自动捕捉尾迹自诱导和机体非定常运动诱导的尾迹畸变,给出更真实的桨盘诱导入流分布,而且还能提供空间任意一点的尾迹诱导速度,便于旋翼/机身/尾面的气动干扰力的计算,对于提高飞行动力学模型的准确性有重要意义。
国外研究者已成功将旋翼自由尾迹模型集成到了已有的飞行动力学模型中[23-25],在集成方法、耦合求解以及实时仿真等方面做了一定的研究,初步显示了旋翼自由尾迹模型在提高飞行动力学模型准确性方面的潜力,而国内相关的研究还较为少见。
本文主要介绍将一种数值稳定、高效的旋翼非定常自由尾迹模型[26]与直升机飞行动力学模型[27]耦合求解的方法,并对孤立模型旋翼和UH-60A直升机在机动飞行中的异轴响应进行计算与验证,同时探讨旋翼尾迹畸变、气动干扰对于异轴响应预测精度的影响。
2旋翼非定常自由尾迹模型
2.1尾迹结构的描述
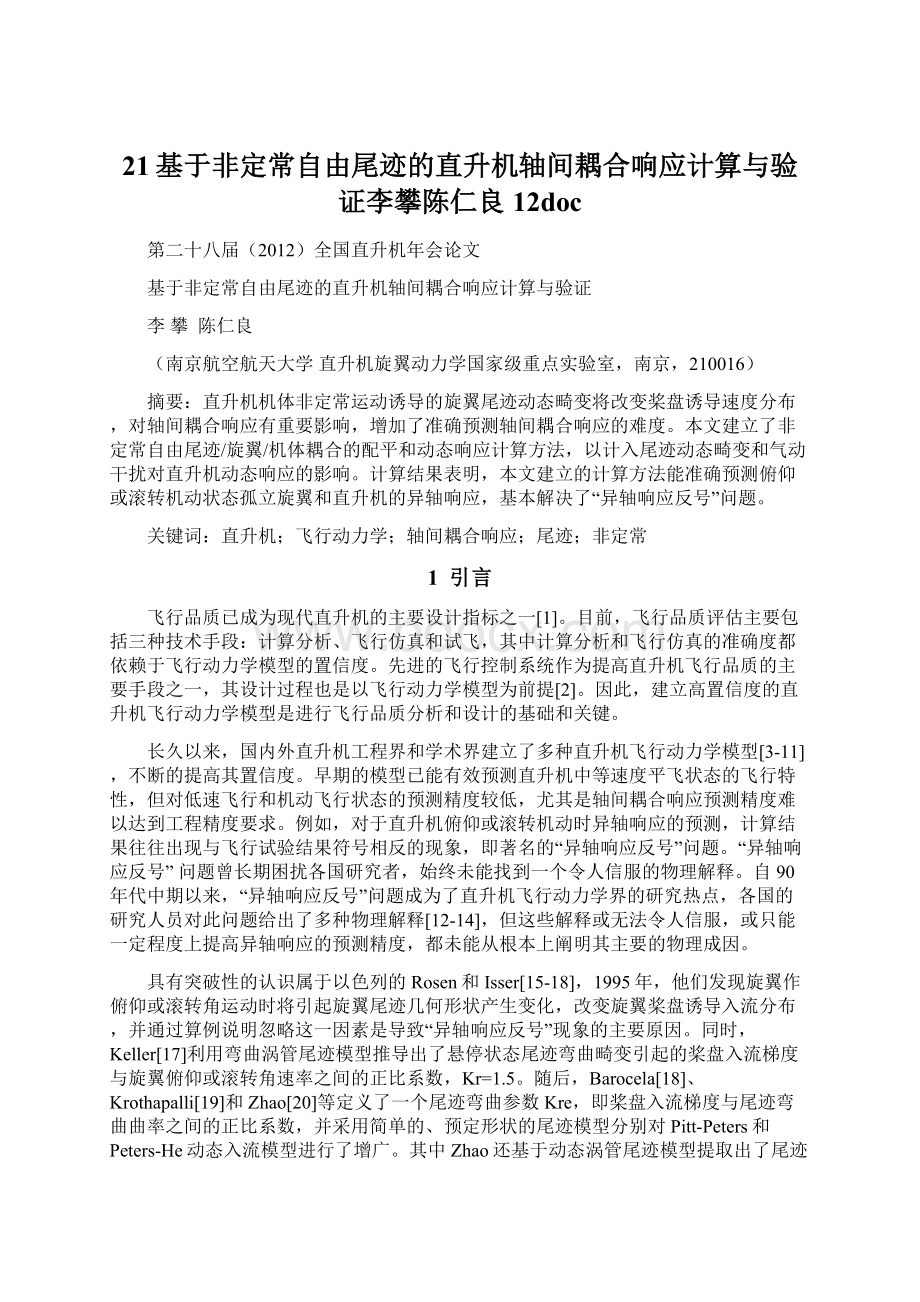
本文中,桨叶上附着涡环量沿展向和旋向的变化分别引起沿旋转方向的尾随涡量和沿桨叶展向的脱体涡量以涡片的形式从桨叶后缘拖入尾迹中,如图1所示。
尾迹涡片从桨叶后缘拖出后,涡片外侧快速卷起形成涡量集中的桨尖涡,而涡片内侧涡强较小,卷起速度较慢。
桨尖涡环量大,涡量集中度高,在旋翼流场中起主导作用。
根据旋翼尾迹的这一特点,从计算效率的角度,将尾迹分为两个部分:
近尾迹和远尾迹。
近尾迹指离桨叶后缘较近的尾迹,此区域内桨尖涡处于卷起过程中,尾迹保持涡片的形式;远尾迹指离桨叶后缘相对较远的尾迹,此区域内桨尖涡已经完全形成。
本文中近尾迹涡片采用涡格的形式来表示,近尾迹涡格环量由库塔条件确定;远尾迹桨尖涡为完全自由
图1桨叶尾迹结构描述示意图
的尾迹,采用离散直涡段组成的单根涡丝来表示,其环量和涡核半径由桨尖涡模型确定。
上述尾迹结构描述方法实际上是对全涡格描述的尾迹模型和单根桨尖涡形式的尾迹模型的一种折衷,兼顾准确性和计算效率。
定义尾迹寿命角(涡龄角)
为尾迹生成时刻
到当前时刻t时段内桨叶扫过的方位角度,即
。
尾迹寿命角作为描述尾迹生成时间长短的度量,可以用来定量的定义近尾迹和远尾迹,规定尾迹寿命角在30º以内的尾迹为近尾迹,寿命角大于30º的尾迹为远尾迹。
2.2尾迹控制方程及时间步进算法
在机动飞行状态,描述旋翼桨尖涡几何形状的控制方程可以表示为:
(1)
其中
为桨尖涡轴线上任意一点相对于桨毂中心的位置矢量,
为桨叶附着涡在
点处的诱导速度,
为旋翼轴作线运动引起的尾迹牵连速度,
为旋翼轴作角运动引起的尾迹牵连速度,
为旋翼轴角速度向量。
尾迹诱导速度
为近尾迹诱导速度
和远尾迹诱导速度
之和,由涡核修正后的直涡段毕奥-萨戈尔公确定。
方程
(1)的边界条件为桨尖涡初始生成位置必须在近尾迹的后缘。
旋翼桨尖涡涡核半径随着时间是变化的,根据Betz卷起规则,考虑涡核粘性扩散和拉伸或压缩变形后,桨尖涡涡核半径控制方程为[28]:
(2)
其中
为涡核半径;α=1.2564为Oseen常数;δ为相对等效粘性系数;L为某段桨尖涡的长度。
关于桨尖涡模型具体细节可参看文献[28]。
尾迹控制方程
(1)为具有非线性源项(尾迹诱导速度项)的一维对流方程,为了采用数值差分和数值积分的方法来求解尾迹控制方程
(1),首先需将桨尖涡在时域
和空间域
范围内进行离散,如图2。
定义桨叶方位角方向的离散步长为
,尾迹寿命角方向的离散步长为
。
那么在时间和空间上连续的桨尖涡位置向量
可以表示为时间和空间内离散的桨尖涡节点
。
为了简单起见,将
写作
,对应的网格结点表示为(l,k)。
图2离散的求解域
在过渡或机动飞行状态,需采用时间步进法求解尾迹的瞬态响应。
由于悬停和小速度飞行状态旋翼尾迹的不稳定性很强,时间步进法易于产生数值不稳定,本文采用文献[26]中提出的数值稳定、高效的CB2D二阶时间步进算法进行求解,计算格式为:
(3)
其中
,为人工数值耗散项的控制系数。
上式右边尽管包括了l+1时间步的节点位置向量
,但是由于
为边界条件,在求解
时
已经求出,因此上式为显示格式,不需要预估步。
3自由尾迹/旋翼/机体耦合求解方法
3.1直升机运动方程
本文的直升机运动方程包括旋翼运动方程、机体运动方程、尾桨入流方程和发动机/传动系统动力学方程。
其中,旋翼采用基于有限元分析的弹性桨叶模型,桨叶气动载荷由Leishman-Beddoes翼型非定常/动态失速气动模型来计算;机体为刚性运动方程。
整个运动方程可以表示为:
(4)
其中t为时间,
为直升机状态量向量,包括了旋翼、机体、尾桨和发动机/传动系统运动方程中的所有状态量,以Nb=4片桨叶旋翼为例,
表示为:
(5)
其中
和
分别为机体的三个线速度和三个角速度;
为机体的三个欧拉姿态角;
为尾桨诱导入流量;
和
分别为第i片桨叶第j个广义自由度(模态)的广义位移和速度;
为旋翼转速、
为燃气发生器涡轮转速、P3为压气机出口压强、P41为燃气发生器涡轮入口压强、为P45动力涡轮入口压强。
为直升机的操纵向量。
直升机运动方程(4)中的具体细节可见文献[27]。
3.2自由尾迹/旋翼/机体耦合配平方法
本节将建立自由尾迹、旋翼、机体、发动机/传动系统耦合的配平计算方法。
首先,为了避免同时求解大规模的非线性代数方程组,将旋翼/机体系统与旋翼自由尾迹系统作为两个子系统分别进行配平计算,在配平过程中采用松耦合的方式进行迭代求解,即旋翼尾迹求解得到的旋转周期内的诱导速度分布作为旋翼/机体动力学模型的输入条件,通过旋翼/机体耦合的配平方程得到新的操纵输入、机体姿态和旋翼的周期运动,以此作为下一次旋翼尾迹求解的前提条件,通过一系列的迭代达到自由尾迹/旋翼/机体相容的稳定解。
其次,为了保证配平计算免受周期稳态解不稳定的影响,以旋翼稳态解的周期性为条件,采用全局伽辽金法将桨叶动力学方程转换为非线性代数方程组,即配平方程,避免了可能存在的旋翼周期稳态解不稳定的影响;采用PIPC松弛迭代求解方法来计算旋翼尾迹的周期稳态解,避免了旋翼尾迹不稳定的影响。
配平方程采用广泛应用的HYBRD非线性代数方程组求解器[29]求解,具体的耦合配平计算流程如下(如图3所示):
1)给定未知量初始值后,HYBRD求解器给出一个试探解;
2)从试探解中提取出旋翼操纵、机体运动速度和角速度以及旋转周期内的桨叶控制点处的绝对运动速度,并传递给自由尾迹模型;
3)自由尾迹模型通过外部环量迭代和内部几何形状迭代,完全收敛后,得到一个与试探解对应的尾迹周期稳态解,计算桨盘诱导速度分布和机身、尾翼气动参考点诱导速度,并传递给旋翼和机体模型;
图3自由尾迹/旋翼/机体耦合配平流程图
4)将试探解和尾迹诱导速度代入配平方程,得出试探解对应的配平方程残值;
5)HYBRD求解器经过多次残差计算得到配平方程的Jacobian矩阵后,更新试探解,完成一次配平迭代;
6)若未收敛,试探解更新后从第2)步开始重新计算,直到收敛为止。
3.3自由尾迹/旋翼/机体耦合动态响应计算方法
与配平计算类似,将旋翼/机体/发动机和传动系统与旋翼自由尾迹系统作为两个子系统分别采用不同的时间积分算法进行求解,但两者采用紧耦合的方式沿时间推进,即旋翼/机体/发动机和传动系统每一时间步的求解中都计入尾迹变化的影响,而尾迹的每一时间步进也都计入旋翼/机体/发动机和传动系统的新的运动信息。
其中,自由尾迹模型采用CB2D时间步进算法求解,旋翼/机体/发动机和传动系统运动方程采用精度可控的DE/STEP求解器进行求解,并采用插值技术使两个时间积分算法完全协调并满足紧耦合的要求。
本文中采用标准一阶常微分方程组求解器DE/STEP[30]来求解直升机运动方程(4)。
DE/STEP求解器是一个变步长、变
 升级会员
升级会员 