过程控制课程设计.docx
《过程控制课程设计.docx》由会员分享,可在线阅读,更多相关《过程控制课程设计.docx(11页珍藏版)》请在冰豆网上搜索。
过程控制课程设计
《过程控制》大作业
题目:
大型煤气炉温度控制系统
班级:
0602201
学号:
********6
******
******
完成时间:
2010年3月16日
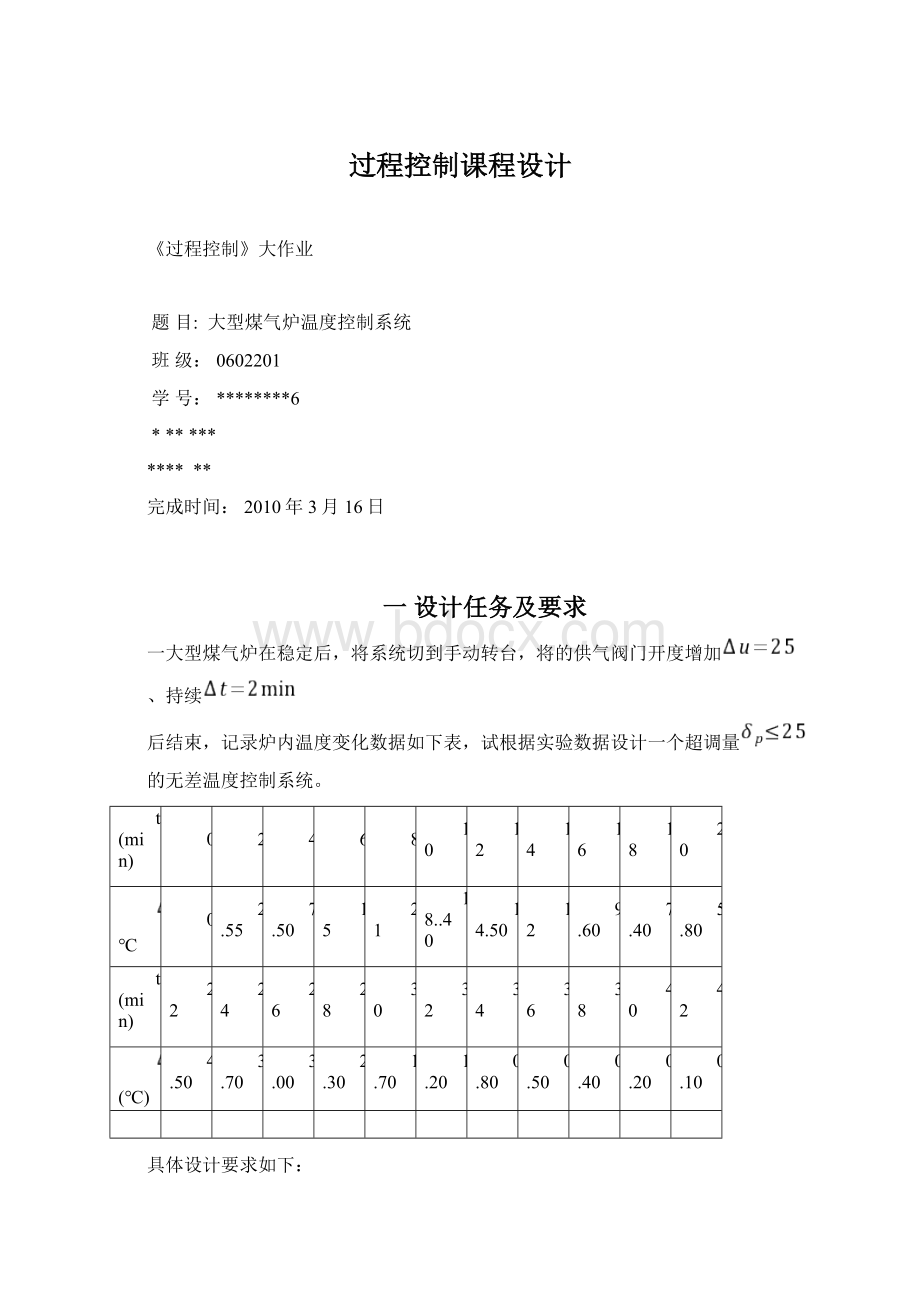
一设计任务及要求
一大型煤气炉在稳定后,将系统切到手动转台,将的供气阀门开度增加
、持续
后结束,记录炉内温度变化数据如下表,试根据实验数据设计一个超调量
的无差温度控制系统。
t(min)
0
2
4
6
8
10
12
14
16
18
20
℃
0
2.55
7.50
15
21
18..40
14.50
12
9.60
7.40
5.80
t(min)
22
24
26
28
30
32
34
36
38
40
42
(℃)
4.50
3.70
3.00
2.30
1.70
1.20
0.80
0.50
0.40
0.20
0.10
具体设计要求如下:
(1)根据实验数据选择一定的辨识方法建立对象的模型;
(2)根据辨识结果设计符合要求的控制系统(给出带控制点的控制流程图,控制系统原理图等,选择控制规律);
(3)根据设计方案选择相应的控制仪表;
(4)对设计系统进行仿真,整定运行参数。
二被控对数学模型建模及对象特性分析
2.1数学模象的型计算及仿真验证
根据矩形脉冲响应数据y,得到阶跃响应数据ys,并进行相应的归一化处理,则得单位阶跃响应数据y*,如下表:
t(min)
0
2
4
6
8
10
12
14
16
18
20
℃
0
2.55
7.50
15
21
18..40
14.50
12
9.60
7.40
5.80
y*℃
0
2.55
10.55
25.05
46.05
64.45
78.95
90.95
100.55
107.95
113.75
t(min)
22
24
26
28
30
32
34
36
38
40
42
(℃)
4.50
3.70
3.00
2.30
1.70
1.20
0.80
0.50
0.40
0.20
0.10
y*℃
118.25
121.95
124.95
127.25
128.95
130.15
130.95
131.45
131.85
132.05
132.15
表1
稳态值y*(∞)=132.15+0.10=132.25。
使用Matlab编辑.m文件,通过给定的矩形脉冲响应求对象的阶跃响应,并用插值方法画出曲线。
图1
将阶跃函数曲线归一化,得到单位阶跃响应如下图,从图中取y*(t1)=0.4,y*(t2)=0.8,则t1=258s;t2=522s。
图2
对象增益为K,K=θ(稳态值)/Δu=5.29。
从归一化曲线中取θ*(t1)=0.4,θ*(t2)=0.8,则t1=8.69s,t2=17.41s,t1/t2=0.46<0.4991<0.534。
因此使用三阶系统,根据公式3*T=(t1+t2)/2.16*60,解得T=241,由于纯延时为0,因此对象的传递函数为:
Gp(s)=Y(s)/U(s)=5.29/{(241s+1)^3}。
其程序代码如下:
x=0:
2:
42;
y1=[02.557.5152118.414.5129.67.45.84.53.73.02.31.71.20.80.50.40.20.1];
y2=[02.5510.0525.0546.0564.4578.9590.95100.55107.95113.75118.25121.95124.95127.25128.95130.15130.95131.45131.85132.05132.15];
y3=132.25;
ys=y2./y3;
x0=0:
0.005:
42;
y4=spline(x,y1,x0);%y,脉冲响应,插值函数
y5=spline(x,y2,x0);%y1,阶跃响应
y6=spline(x,ys,x0);%ys,单位阶跃响应
plot(x,y1,'r*')
holdon
plot(x0,y3,'m');
holdon
gtext('红色--脉冲响应');
holdon;
plot(x,y2,'m*')
holdon
plot(x0,y5);
gtext('绿色--阶跃响应');
grid;
figure;
plot(x0,y6,'r')
gtext('单位阶跃响应');
grid;
2.2对象特性分析
分析所得的对象传递函数的特性,观察其稳定性。
程序如下:
num=[5.29];
den=conv([2411],conv([2411],[2411]));
G=tf(num,den);
W=feedback(G,1);
step(W);
gtext('单位阶跃响应');
grid;
所得响应曲线如下图:
图3
由上图可知,随着时间的推移,该对象的单位阶跃响应呈现稳定状态,但系统超调太大,震荡太厉害,且为温度控制系统,应使用PID进行控制。
三控制系统设计
3.1基本控制方案
采用基本PID调节。
PID控制是比例积分微分,控制的简称。
是一种负反馈控制。
即控制器与广义被控对象构成的系统为闭环负反馈系统。
其作用是对输入偏差进行调节,从而缓解系统的不平衡,使系统输出稳定。
P:
基本作用是使输入输出无相差,Kc增加。
作用增强,余差下降,超调减少,稳定性变差。
I:
引入之后消除余差,但幅值增加,相位滞后,稳定裕度下降,同时应防积分饱和。
D:
引入后幅值增加,相位超前,使稳定裕度提高。
由于温度控制属于慢控制,所以进入D环节来加快调节速度。
系统流程图如下图:
系统流程图如下图
图4
系统原理图如下图:
图5
3.2控制仪表选择
选择目前通用的DDZ-Ⅲ型表。
由于煤气炉温度很高,所以采用热电偶,Km>0,调节阀为气开阀,保证煤气炉的安全性。
有Kv>0,对象Kp>0,因此调节器Kc>0。
温度变送器量程为0—1500℃,调节阀范围0—100T/min,则
Gv=(100-0)/(20-4)=6.25T/min/mA,Gm=(20-4)/(1500-0)=0.0107mA/℃.
所以Go=Gv*Gp*Gm,则广义对象的传函为:
G0=0.3538/{(241s+1)^3}。
3.3参数整定
设调节器传递函数为Gc(s)=Kp*(1+1/(Ti*s)+Td*s),采用Z-N法对PID参数进行整定。
首先求控制对象的单位阶跃响应。
其程序如下:
num=[0.3538];
den=conv([2411],conv([2411],[2411]));
G=tf(num,den);
step(G);
k=dcgain(G)
k=
0.3538
图6
由上图可知,tao=216s,T=1080-200=864s,用z-n法确定PID参数kp、Ti、Td。
其程序代码如下:
k=0.3538;tao=216;t=864;
kp=1.17*t/(k*tao);Ti=2*tao;Td=0.5*tao;
kp,Ti,Td,
s=tf('s');
Gc=kp*(1+1/(Ti*s)+Td*s);
num=0.3538;
den=conv([241,1],conv([241,1],[241,1]));
G0=tf(num,den);
G=feedback(Gc*G0,1);
step(G)
得到kp=13.2278
Ti=432
Td=108
图7
通过上图可以明显看到超调还是大于要求的25%,但震荡频率明显减小。
为了达到设计要求,对整定后的参数进行修改。
减小kp且增大Td,得到的仿真结果如下:
kp=7;Ti=480;Td=200;
s=tf('s');
Gc=kp*(1+1/(Ti*s)+Td*s);
num=0.3538;
den=conv([241,1],conv([241,1],[241,1]));
G0=tf(num,den);
G=feedback(Gc*G0,1);
step(G)
图8
最终整定后参数为kp=7;Ti=480;Td=200。
由上图可知:
超调量最大为20%,误差带为5%时的Ts=1400s。
系统超调量符合要求20%<25%;且为无差系统;调节时间比较合适。
采用此方法满足题目要求。
3.4系统仿真
在Simulation中对系统进行仿真,其仿真原理图如下图:
图9
得到的仿真曲线如下图所示:
图10
由上图可以看出来,最终整定的结果是符合设计要求的,超调量最大为20%,误差带为5%时的Ts=1700s。
系统超调量符合要求20%<25%;且为无差系统;调节时间比较合适。
因此采用此方法满足题目要求。
 升级会员
升级会员 