数值模拟计算整个过程.docx
《数值模拟计算整个过程.docx》由会员分享,可在线阅读,更多相关《数值模拟计算整个过程.docx(19页珍藏版)》请在冰豆网上搜索。
数值模拟计算整个过程
数值模拟计算的整个过程
数值模拟计算的整个过程主要包括一下几个过程:
一.建立模型(应用软件:
CAD工具如PRO/E,Bladegen等)
几何生成时应注意的问题主要有以下几个部分:
1.几何生成
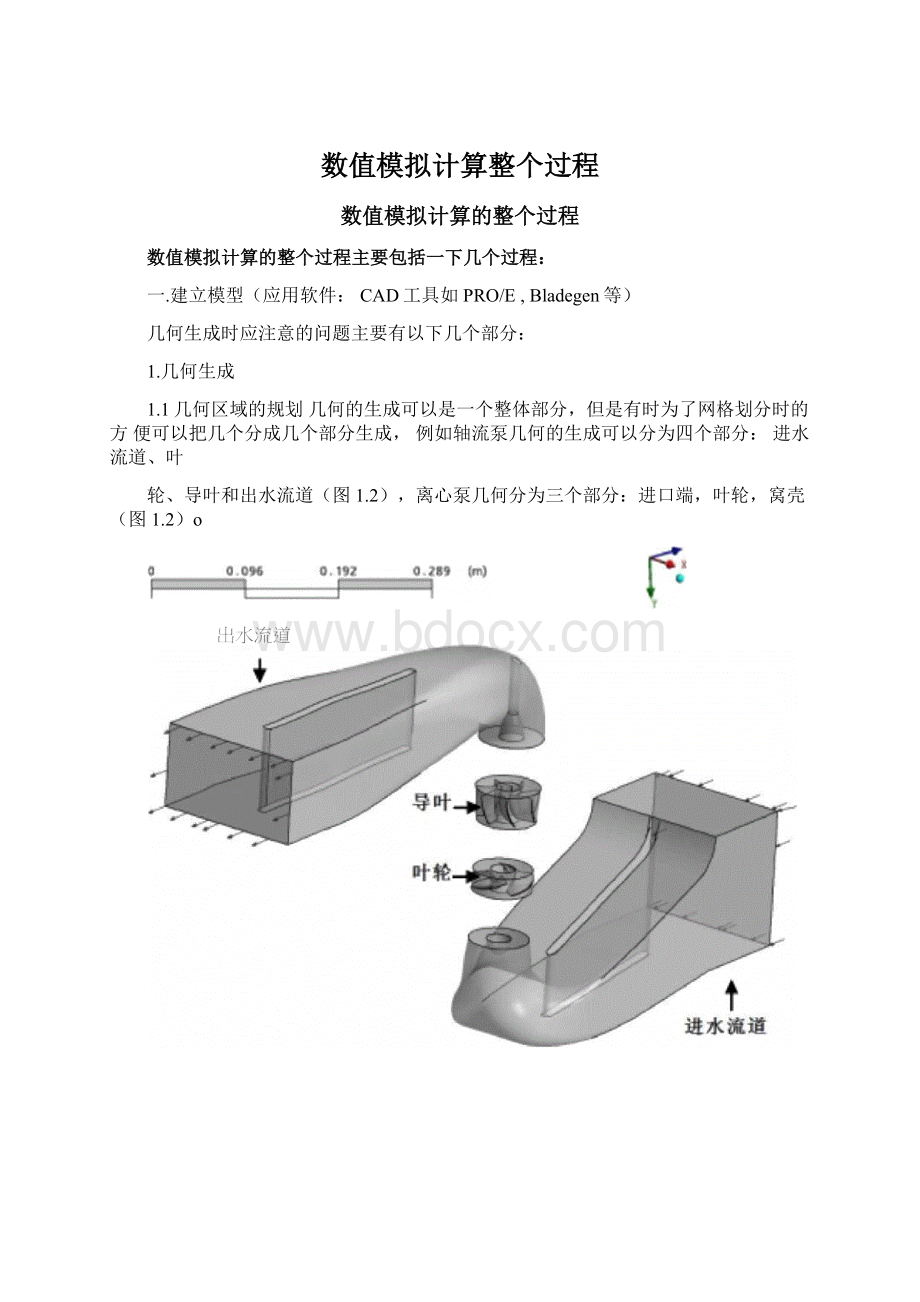
1.1几何区域的规划几何的生成可以是一个整体部分,但是有时为了网格划分时的方便可以把几个分成几个部分生成,例如轴流泵几何的生成可以分为四个部分:
进水流道、叶
轮、导叶和出水流道(图1.2),离心泵几何分为三个部分:
进口端,叶轮,窝壳(图1.2)o
图1.2离心泵几何
1.2几何生成的方法
1.2.1泵的叶轮和导叶部分可以根据各自的木模图使用BLADEGEN较为方便的生成
1.2.2而其他部分则可以通过ProE等三维CAD工具生成,其中离心泵窝壳由窝壳木
模图先将各断面绘制成型,再利用扫掠的方法成型。
1.3.几何输出
1.3.1从PRO/E中导出文件时可以选择保存成igs格式,也可以保存成stp格式,在导出
时按其默认格式保存,即igs格式的保存成面的形式,stp格式的保存成体和壳的形式。
1.3.2.进出水流道部分(轴流泵),进口端(离心泵)要做适当的延伸。
1.3.3从PRO/E中导出之前可以可以改单位,或者明确几何生成时所用单位,以便导入。
1.3.4各部分的特征位置的坐标要明确,如几何中心,原点,以便各部分导入后的合并。
二.网格划分(软件:
ANSYSICEM)
网格划分主要有以下几部分:
2.1.几何检查及修复通过检查几何命令检查几何并将错误的部分根据实际情况修复
(以轴流泵出水流道为例,见图2.1)
图2.1(a)轴流泵出水流道几何检查
图2.1(b)修复后的轴流泵出水流道几何
2.2设置part
2.3.
建立物质点(生成四面体网格时必须)
图2.3建立物质点
2.4.设置网格大小,生成网格
2.4.1六面体网格的生成。
分块六面体网格生成主要是分块的思想,一般不外乎0型,C型,H型,J型。
就叶轮
以及导叶,对包角较大的叶片采用J型,包角小的则采用H型网格,往往为提高质量可以
在叶片表面附着一层0型网格;对于离心泵的窝壳采用C型网格,其割舌部分用C型网格;对于轴流泵进出口流道的拓朴结构可以根据具体几何形状划分块,可参照附图(图2.4)。
叶片J网格拓扑和生成网格
导叶H型网格拓扑和生成网格
出水流道网格块结构和生成网格
图2.4网格拓扑和生成网格
2.4.2近壁网格处理
近壁面的网格需要加密,以满足y+的要求。
对于k-;模型,y+值一般要求在100这个量级,Y+的具体要求如下:
Turbulence
Models
Htgh-Re
Stand&rd
ExtendedVb'aJ-functionZ计11aecepl.valuet}
Low-Re
Saldwin-lomax.
Launder-Shamak-:
\Yang-Shih打时,Chienfc-f,Extended^all-function2SpakrUAllm^ras
Non-Linear2(iLutadforreMarch,n«Hfgh-Rc
Law-Re
20-50
1*w
20-50
1*W
对于k-•模型,y+值一般要求在1这个量级,一般为4〜5。
因此需要控制第一层网格的大小及近壁网格的数量。
第一层网格大小的估算公式如下
此外须在近壁区厚度的范围内添加足够的网格数,要求如下:
10forwallfunction
IStorlow-Remodel
其、:
的估算公式为
£-
设置方法以下图为参考,首先确定通过上面的估算公式计算:
.及ywall,进行对块上网格的
设置,并生成非结构网格,此时第一层网格的大小为、,然后根据公式:
=:
-Nnorma"ywall,计
£I^Enviran*ent11.(1二
图241近壁面网格切分
2.5网格检查及修复
对于六面体网格,在未生成非结构化网格之前在blocking选项卡中进行网格质量的
检查及光顺,对于生成非结构化网格之后的网格及四面体网格在editmesh选项卡中进行网
格质量检查。
四面体网格可以通过网格光顺工具来提高网格质量,但不易调整。
六面体网格需要通过调整块节点的位置来提高网格质量;块节点的调整需根据几何形状具体调整。
也可以通过
editmesh中的选项卡中的工具进行网格修复。
一般而言按照quality方式进行网格质量检查时推荐quality大于0.3。
存在的问题:
1)综合网格质量quality是如何定义的,其值大于0.3的依据尚不明确
2)网格质量判定除了quality之外还有哪些重要的影响因素
-AIL.,*:
seE>n|VBED^_qut
Pr-lfaihn.abii!
图2.5网格质量检查及光顺
2.6.导出网格
首先要将网格转化成非结构网格(仅指六面体),再在output选项卡中选择求解器,再
输出网格。
FidrH
理捲ktOEES
QdvJ6S催*蜃OP?
IwLF^.TVoy
却墻广输冷呦
图2.6网格输出
三.CFX的计算
3.1建立一个simulation
打开CFX进入CFX-pre,在file菜单中建立一个newsimulation,选择generalmodel进
入CFX-pre的界面。
3.1.1导入网格
进入mesh选项卡,选择importmesh或从file菜单中选择importmesh,进入网格导入界面。
在网格导入界面中,选择definition选项卡,在meshformat中的下拉菜单中选择ICEMCFD,在file中,选取所要引入的网格,并在meshunits中正确选择单位(见图3.1.1)。
一般轴流泵分进水流道,叶轮,导叶以及出水流道四个部分的网格;离心泵分为叶轮,窝壳以
及入口扩充断的三个部分的网格。
I5^曲匚Btfc-
■•J芳・"・肾鱼主左昼咼齐柳叟曰刊曰船口直巳审勺
图3.1.1网格导入
由于各部分网格在几何造型时,位置安排不一定统一,以及导叶或者叶轮部分网格可通过Turbogrid或者ICEMCFD中生成一个流道的网格,所以网格在导入后需要调整位置,复制叶轮网格等操作。
对需要调整的部分在mesh选项卡中用鼠标右键单击该部分网格选择
Transform,此时需要调整的网格部分变为绿色,并在窗口左下方definition选项卡中选择
Transformation的类型,对于需要移动的部分选择translation选项,可以通过调整移动坐标
来移动该部分;对于需要旋转的部分选择rotation选项,通过对旋转轴及旋转角度设定可以
旋转网格。
对于单一流道的叶片网格在旋转的同时需要重复拷贝该部分网格,需选择
Multiplecopy选项,拷贝n-1个,n为叶片或者导叶的数量,并选择GlueMatchingAssumbles,这样可以将拷贝后的各部分网格合并为一个整体,这个必须保证相应边上网格完全一致,否
则会产生多余的面。
(见图3.1.2)
图3.1.2网格调整
3.1.2计算定义
在tool菜单中选择Turbomode进入叶轮机计算模式,在basic设置中选择旋转轴及坐
标系。
进入componentdefinition,建立一个新的component,在弹出的newcomponent菜单中,根据实际情况选择是静止或旋转的类型,其中叶轮为旋转部分,需定义转速,转速方向定义
根据右手法则,其余部分为静止部分。
在meshvolume框体中的下拉菜单里选择相应的网格
部分。
如果在网格面定义时命名规范则在turbomodel中regioninformation会自动适配相应
的区域,并对该区域的边界条件进行定义。
进入physicaldefinition框体,选择计算类型(定常、非定常,非定常需定义参数)、湍流模式及进出口边界条件,对于非定场计算需设置timestep及totaltime,timestep根据CFL数预先估计。
一般选择massflowinletp-staticoutlet给定入口流量及出口静压值。
SiCFZFze:
Jtdke_S
:
h胖昨|rflfrfn|民略叭|Etprr:
齐Iqt斥||口卬就人创LfewMbdfl|
f?
ZV站*y
CoordwwteFrime0二]
H.ol:
ab■tilB怪怪毎G'*
ReE<*£Z©VtewcrTodsHdp
老*GC•■血■•%■■*]・•[:
FfffO:
sVesh|Reacts||Matenafs|ReocticrfilK*M>3e|
ComponentDtfWtfcn
htetpart
0砂$«Mon0eateYtevwlookbe^>
!
!
■•□毛匕•約。
丨
Hrfy:
&|vesh|丿“”乙|t:
;-e^ons|FtuoiE|ReazbrwUserMode|
Ff^acsDeh-rKn
▲
2[wierF
MMhVjkjrrc«
MAmm.|A»Mmb>y?
刁
Re^nlnfcfnatton
Mb|
Stroud|F
BxJe|
Met|IM"73
rp・t如函p-aabccaw
rP-Toul!
rtetMassFkMOudee
AT*hHP-Sl^Oube*
MX«
PSattc
|o㈣)
HwsFkw
|PerCowponert
FkwR>u
|5I.9m|
Im^zJ
AowOr«t>yi
|ton«hoBo>j-idafy
~3
&*s^Caned
vg
Mext>
E«5h
£«xd
_■首鮎1
■
1>*K■■A
|Mesh|FLpdts
|Exprnewnns-
R-p-sEj-dtb
LkerMede
決护sion'Q-eate[ockHpt1
Final匚餐瞅bn;
QpttM«nlENvGentfiMMode创
图3.1.3计算定义
进入interfacedefinition定义interface,其中转动部分和静止部分之间的类型是frozen
rotor,静止部件之间是none。
进入boundarydefinition,定义边界条件,一般系统会自动的根据前面的设置自动定义边界条件,也可根据需要自行定义。
以上部分参见图3.1.3。
进入generalmode,根据需要设置迭代次数及残差。
残差推荐是1e-4。
可以在Solvecontrol中可以选择时间步(timescalcontrol和physicaltimescal,其中physicaltimescal为转速分之一)。
见图3.1.4。
 升级会员
升级会员 