边缘检测和轮廓提取方法和VC++程序.docx
《边缘检测和轮廓提取方法和VC++程序.docx》由会员分享,可在线阅读,更多相关《边缘检测和轮廓提取方法和VC++程序.docx(12页珍藏版)》请在冰豆网上搜索。
边缘检测和轮廓提取方法和VC++程序
边沿检测和轮廓提取方法和程序
1边沿检测
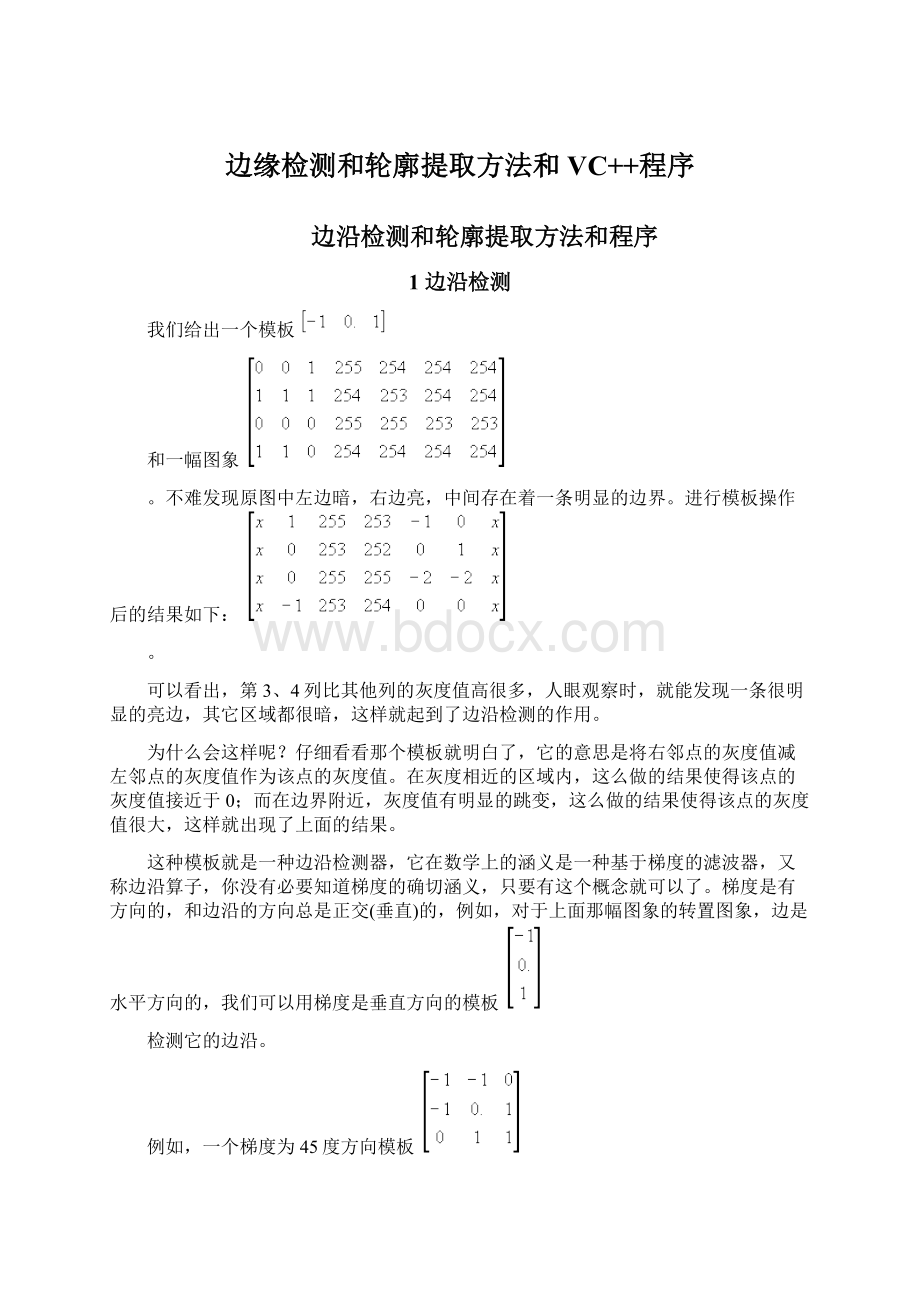
我们给出一个模板
和一幅图象
。
不难发现原图中左边暗,右边亮,中间存在着一条明显的边界。
进行模板操作后的结果如下:
。
可以看出,第3、4列比其他列的灰度值高很多,人眼观察时,就能发现一条很明显的亮边,其它区域都很暗,这样就起到了边沿检测的作用。
为什么会这样呢?
仔细看看那个模板就明白了,它的意思是将右邻点的灰度值减左邻点的灰度值作为该点的灰度值。
在灰度相近的区域内,这么做的结果使得该点的灰度值接近于0;而在边界附近,灰度值有明显的跳变,这么做的结果使得该点的灰度值很大,这样就出现了上面的结果。
这种模板就是一种边沿检测器,它在数学上的涵义是一种基于梯度的滤波器,又称边沿算子,你没有必要知道梯度的确切涵义,只要有这个概念就可以了。
梯度是有方向的,和边沿的方向总是正交(垂直)的,例如,对于上面那幅图象的转置图象,边是水平方向的,我们可以用梯度是垂直方向的模板
检测它的边沿。
例如,一个梯度为45度方向模板
,可以检测出135度方向的边沿。
1. Sobel算子
在边沿检测中,常用的一种模板是Sobel算子。
Sobel算子有两个,一个是检测水平边沿的
;另一个是检测垂直平边沿的
。
与
和
相比,Sobel算子对于象素的位置的影响做了加权,因此效果更好。
Sobel算子另一种形式是各向同性Sobel(IsotropicSobel)算子,也有两个,一个是检测水平边沿的
,另一个是检测垂直平边沿的
。
各向同性Sobel算子和普通Sobel算子相比,它的位置加权系数更为准确,在检测不同方向的边沿时梯度的幅度一致。
下面的几幅图中,图7.1为原图;图7.2为普通Sobel算子处理后的结果图;图7.3为各向同性Sobel算子处理后的结果图。
可以看出Sobel算子确实把图象中的边沿提取了出来。
图7.1 原图
图7.2 普通Sobel算子处理后的结果图
图7.3 各向同性Sobel算子处理后的结果图
在程序中仍然要用到第3章介绍的通用3×3模板操作函数TemplateOperation,所做的操作只是增加几个常量标识及其对应的模板数组,这里就不再给出了。
2. 高斯拉普拉斯算子
由于噪声点(灰度与周围点相差很大的点)对边沿检测有一定的影响,所以效果更好的边沿检测器是高斯拉普拉斯(LOG)算子。
它把我们在第3章中介绍的高斯平滑滤波器和拉普拉斯锐化滤波器结合了起来,先平滑掉噪声,再进行边沿检测,所以效果会更好。
常用的LOG算子是5×5的模板,如下所示
。
到中心点的距离与位置加权系数的关系用曲线表示为图7.4。
是不是很象一顶墨西哥草帽?
所以,LOG又叫墨西哥草帽滤波器。
图7.4 LOG到中心点的距离与位置加权系数的关系曲线
图7.5为图7.1用LOG滤波器处理后的结果。
图7.5 图7.1用LOG滤波器处理后的结果图
LOG的算法和普通模板操作的算法没什么不同,只不过把3×3改成了5×5,这里就不再给出了。
读者可以参照第3章的源程序自己来完成。
7.2Hough变换
Hough变换用来在图象中查找直线。
它的原理很简单:
假设有一条与原点距离为s,方向角为θ的一条直线,如图7.6所示。
图7.6 一条与原点距离为s,方向角为θ的一条直线
直线上的每一点都满足方程
(7.1)
利用这个事实,我们可以找出某条直线来。
下面将给出一段程序,用来找出图象中最长的直线(见图7.7)。
找到直线的两个端点,在它们之间连一条红色的直线。
为了看清效果,将结果描成粗线,如图7.8所示。
图7.7原图
图7.8Hough变换的结果
可以看出,找到的确实是最长的直线。
方法是,开一个二维数组做为计数器,第一维是角度,第二维是距离。
先计算可能出现的最大距离为
,用来确定数组第二维的大小。
对于每一个黑色点,角度的变化范围从00到1780(为了减少存储空间和计算时间,角度每次增加20而不是10),按方程(7.1)求出对应的距离s来,相应的数组元素[s][
]加1。
同时开一个数组Line,计算每条直线的上下两个端点。
所有的象素都算完后,找到数组元素中最大的,就是最长的那条直线。
直线的端点可以在Line中找到。
要注意的是,我们处理的虽然是二值图,但实际上是256级灰度图,不过只用到了0和255两种颜色。
BOOLHough(HWNDhWnd)
{
//定义一个自己的直线结构
typedefstruct{
inttopx;//最高点的x坐标
inttopy;//最高点的y坐标
intbotx;//最低点的x坐标
intboty;//最低点的y坐标
}MYLINE;
DWORD OffBits,BufSize;
LPBITMAPINFOHEADER lpImgData;
LPSTR lpPtr;
HDC hDc;
LONG x,y;
long i,maxd;
int k;
int Dist,Alpha;
HGLOBAL hDistAlpha,hMyLine;
Int *lpDistAlpha;
MYLINE *lpMyLine,*TempLine,MaxdLine;
staticLOGPEN rlp={PS_SOLID,1,1,RGB(255,0,0)};
HPEN rhp;
//我们处理的实际上是256级灰度图,不过只用到了0和255两种颜色。
if(NumColors!
=256){
MessageBox(hWnd,"Mustbeamonobitmapwithgrayscalepalette!
",
"ErrorMessage",MB_OK|MB_ICONEXCLAMATION);
returnFALSE;
}
//计算最大距离
Dist=(int)(sqrt((double)bi.biWidth*bi.biWidth+
(double)bi.biHeight*bi.biHeight)+0.5);
Alpha=180/2; //0到to178度,步长为2度
//为距离角度数组分配内存
if((hDistAlpha=GlobalAlloc(GHND,(DWORD)Dist*Alpha*
sizeof(int)))==NULL){
MessageBox(hWnd,"Errorallocmemory!
","ErrorMessage",
MB_OK|MB_ICONEXCLAMATION);
returnFALSE;
}
//为记录直线端点的数组分配内存
if((hMyLine=GlobalAlloc(GHND,(DWORD)Dist*Alpha*
sizeof(MYLINE)))==NULL){
GlobalFree(hDistAlpha);
return FALSE;
}
OffBits=bf.bfOffBits-sizeof(BITMAPFILEHEADER);
//BufSize为缓冲区大小
BufSize=OffBits+bi.biHeight*LineBytes;
lpImgData=(LPBITMAPINFOHEADER)GlobalLock(hImgData);
lpDistAlpha=(int*)GlobalLock(hDistAlpha);
lpMyLine=(MYLINE*)GlobalLock(hMyLine);
for(i=0;i<(long)Dist*Alpha;i++){
TempLine=(MYLINE*)(lpMyLine+i);
(*TempLine).boty=32767;//初始化最低点的y坐标为一个很大的值
}
for(y=0;y //lpPtr指向位图数据
lpPtr=(char*)lpImgData+(BufSize-LineBytes-y*LineBytes);
for(x=0;x if(*(lpPtr++)==0)//是个黑点
for(k=0;k<180;k+=2){
//计算距离i
i=(long)fabs((x*cos(k*PI/180.0)+y*sin(k*PI/180.0)));
//相应的数组元素加1
*(lpDistAlpha+i*Alpha+k/2)=*(lpDistAlpha+i*Alpha+k/2)+1;
TempLine=(MYLINE*)(lpMyLine+i*Alpha+k/2);
if(y>(*TempLine).topy){
//记录该直线最高点的x,y坐标
(*TempLine).topx=x;
(*TempLine).topy=y;
}
if(y<(*TempLine).boty){
 升级会员
升级会员 