自动控制理论实验指导书.docx
《自动控制理论实验指导书.docx》由会员分享,可在线阅读,更多相关《自动控制理论实验指导书.docx(22页珍藏版)》请在冰豆网上搜索。
自动控制理论实验指导书
目录
实验装置介绍……………………………………………………1
实验一一、二阶系统阶跃响应……………………………2
实验二控制系统稳定性分析…………………………………5
实验三系统频率特性分析……………………………………7
实验四线性系统串联校正……………………………………9
实验五MATLAB及仿真实验…………………………………12
实验装置介绍
自动控制原理实验是自动控制理论课程的一部分,它的任务是:
一方面,通过实验使学生进一步了解和掌握自动控制理论的基本概念、控制系统的分析方法和设计方法;另一方面,帮助学生学习和提高系统模拟电路的构成和测试技术。
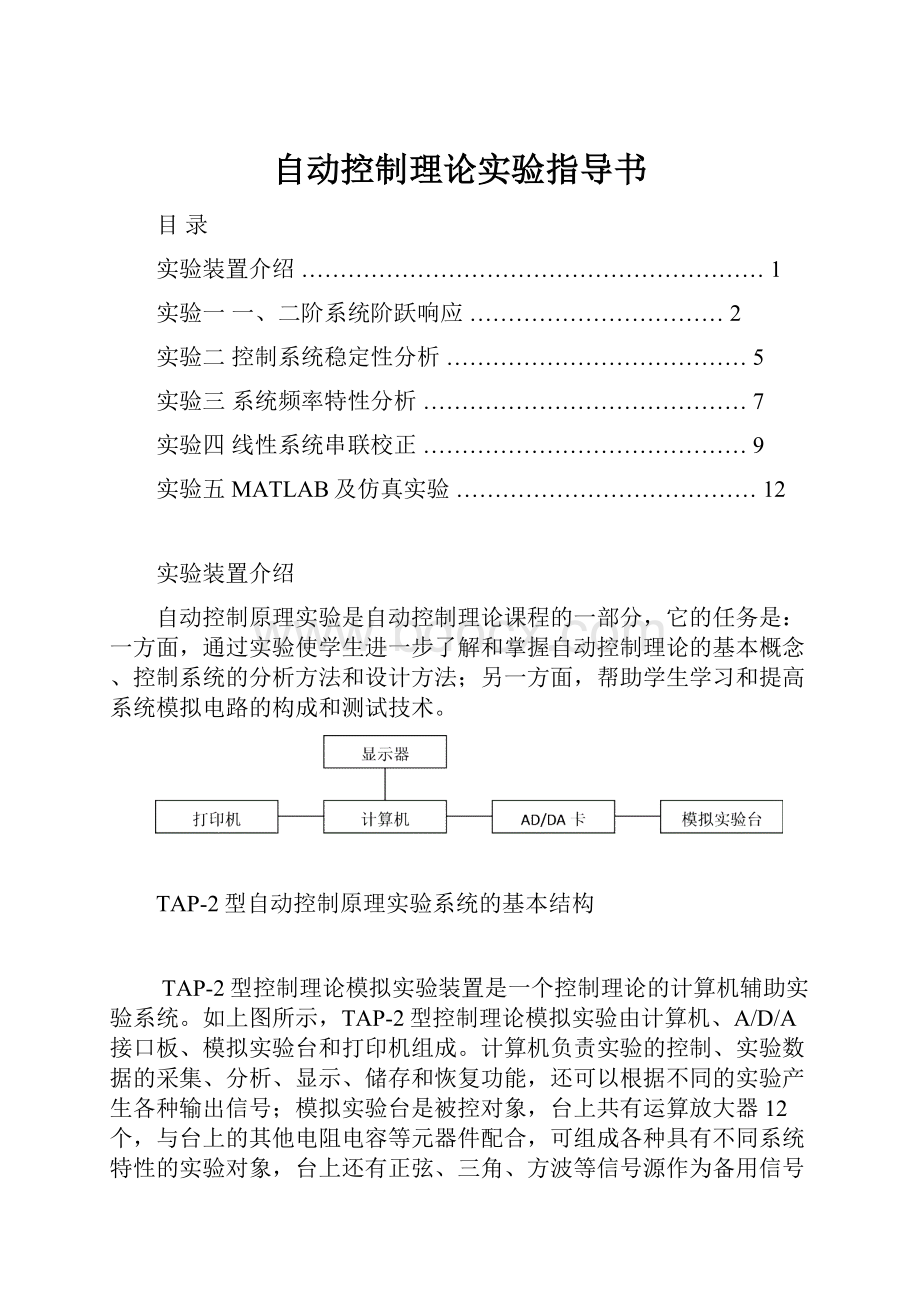
TAP-2型自动控制原理实验系统的基本结构
TAP-2型控制理论模拟实验装置是一个控制理论的计算机辅助实验系统。
如上图所示,TAP-2型控制理论模拟实验由计算机、A/D/A接口板、模拟实验台和打印机组成。
计算机负责实验的控制、实验数据的采集、分析、显示、储存和恢复功能,还可以根据不同的实验产生各种输出信号;模拟实验台是被控对象,台上共有运算放大器12个,与台上的其他电阻电容等元器件配合,可组成各种具有不同系统特性的实验对象,台上还有正弦、三角、方波等信号源作为备用信号发生器用;A/D/A板安装在模拟实验台下面的实验箱底板上,它起着模拟与数字信号之间的转换作用,是计算机与实验台之间必不可少的桥梁;打印机可根据需要进行连接,对实验数据、图形作硬拷贝。
实验台由12个运算放大器和一些电阻、电容元件组成,可完成自动控制原理的典型环节阶跃响应、二阶系统阶跃响应、控制系统稳定性分析、系统频率特性测量、连续系统串联校正、数字PID、状态反馈与状态观测器等相应实验。
实验一一、二阶系统阶跃响应
一、实验目的
1.学习构成一、二阶系统的模拟电路,了解电路参数对系统特性的影响;研究二阶系统的两个重要参数:
阻尼比和无阻尼自然频率n对动态性能的影响。
2.学习一、二阶系统阶跃响应的测量方法,并学会由阶跃响应曲线计算一、二阶系统的传递函数。
二、实验仪器
1.自动控制系统实验箱一台
2.计算机一台
三、实验原理
模拟实验的基本原理:
控制系统模拟实验采用复合网络法来模拟一、二阶系统,即利用运算放大器不同的输入网络和反馈网络模拟一、二阶系统,然后按照给定系统的结构图将这些模拟环节连接起来,便得到了相应的模拟系统。
再将输入信号加到模拟系统的输入端,并利用计算机等测量仪器,测量系统的输出,便可得到系统的动态响应曲线及性能指标。
若改变系统的参数,还可进一步分析研究参数对系统性能的影响。
四、实验内容
构成下述系统的模拟电路,并测量其阶跃响应:
1.一阶系统的模拟电路如图
2.
U0
二阶系统的模拟电路如图
五、实验步骤
一阶系统阶跃响应实验
1.连接一阶系统模拟电路及D/A、A/D连线,检查无误后接通电源。
2.测试计算机与实验箱的通信是否正常,通信正常继续。
如通信不正常查找原因使通信正常后才可以继续进行实验。
3.在桌面双击图标[自动控制原理实验]运行软件。
4.点击“实验选择”菜单选中“典型环节阶跃响应”栏,再打开“参数设置”菜单,设定采样周期T和采样点数N的值(计算机默认亦可)。
点击“开始”按钮,进行实验。
5.观测计算机屏幕显示出的响应曲线及数据。
6.记录波形及数据(由实验报告确定)。
二阶系统阶跃响应实验
7.连接二阶系统模拟电路及D/A、A/D连线,检查无误后接通电源。
8.测试计算机与实验箱的通信是否正常,通信正常继续。
如通信不正常查找原因使通信正常后才可以继续进行实验。
9.在桌面双击图标[自动控制原理实验]运行软件。
设定采样周期T和采样点数N的值(计算机默认亦可)。
点击“开始”按钮,进行实验。
10.取n=10rad/s,即令R=100K,C=1f;分别取=0、0.5、1、2,即取R1=100K,R2分别等于0、100K、200K、400K。
输入阶跃信号,测量系统阶跃响应,并记录最大超调量p和调节时间ts的值。
11.取=0.5,即取R1=R2=100K;n=100rad/s,取R=100K,C=0.1f。
注意:
二电容同时改变,测量系统阶跃响应,并记录最大超调量p和调节时间ts数值。
12.取R=100K,C=1f,R1=100K,R2=50K,测量系统阶跃响应,记录响应曲线,特别要记录最大超调量p和调节时间ts数值。
六、实验报告
1.画出一阶系统(惯性环节)二阶系统的模拟电路图,用坐标纸画出所记录的理论曲线及实验响应曲线,加以比较,分析原因。
2.阶跃响应曲线计算出各环节的传递函数,并与电路计算的结果相比较。
3.观测计算机屏幕示出的响应曲线及数据。
4.记录波形及图形。
对于二阶系统要求:
①把不同和n条件下测量的p和ts值列表,根据测量结果得出响应结论。
②画出系统的理论响应曲线和实验响应曲线,再由p和ts计算出传递函数,并与由模拟电路计算的传递函数相比较。
实验二控制系统稳定性分析
一、实验目的
1.观察系统的不稳定现象。
2.研究系统开环增益和时间常数对稳定性的影响。
二、实验仪器
1.自动控制系统实验箱一台
2.计算机一台
三、实验内容
系统模拟电路图如图2-1
图2-1系统模拟电路图
其开环传递函数为:
G(s)=10K1/s(0.1s+1)(Ts+1)
式中K1=R3/R2,R2=100K,R3=0~500K;T=RC,R=100K,C=1f或C=0.1f两种情况。
四、实验步骤
1.连接被测量系统的模拟电路。
电路的输入U1接A/D、D/A卡的DA1输出,电路的输出U2接A/D、D/A卡的AD1输入。
检查无误后接通电源。
2.启动计算机,在桌面双击图标[自动控制原理实验]运行软件。
3.在实验项目的下拉列表中选择实验三[控制系统的稳定性分析]。
4.取R3的值为50K,100K,200K,此时相应的K=10K1=5,10,20。
观察不同R3值时显示区内的输出波形(既U2的波形),找到系统输出产生增幅振荡时相应的R3及K1值。
再把电阻R3由大至小变化,即R3=200k,100k,50k,观察不同R3值时显示区内的输出波形,找出系统输出产生等幅振荡变化的R3及K1值,并观察U2的输出波形。
五、实验报告
1.画出系统的模拟电路图。
2.画出系统增幅或减幅振荡的波形图。
3.计算系统的临界放大系数,并与实验中测得的临界放大系数相比较。
六、预习要求
1.分析实验系统电路,掌握其工作原理。
2.理论计算系统产生等幅振荡、增幅振荡、减幅振荡的条件。
实验三系统频率特性分析
一、实验目的
1.加深了解系统及元件频率特性的物理概念。
2.掌握系统及元件频率特性的测量方法。
二、实验仪器
1.自动控制系统实验箱一台
2.计算机一台
三、实验内容
1.模拟电路图及系统结构图分别如图3-1。
图3-1系统模拟电路图
2.系统传递函数取R=1M,则系统传递函数为
U2(S)1000
G(S)==
U1(S)S2+10S+1000
若输入信号U1(t)=U1msint,则在稳态时,其输出信号为
U2(t)=U2msin(t+)
改变输入信号角频率值,便可测得二组U2m/U1m和随变化的数值,这个变化规律就是系统的幅频特性和相频特性。
五、实验步骤
1.连接被测量典型环节的模拟电路。
电路的输入U1接A/D、D/A卡的DA1输出,电路的输出U2接A/D、D/A卡的AD1输入,检查无误后接通电源。
2.启动计算机,在桌面双击图标[自动控制原理实验]运行软件。
3.测试计算机与实验箱的通信是否正常,通信正常继续。
如通信不正常查找原因使通信正常后才可以继续进行实验。
4.根据屏幕提示测量多点输出与输入正弦波的振幅比及相位差,并记录相应数据。
参考频率为:
(注意:
实验时电阻R可在0-1M之间反复调整,直至合适值方能得到较理想的实验曲线)
F(Hz)=0.5,1,2,4,6,8,…………最后画波特图。
六、实验报告
1.画出被测系统的模拟电路图,计算其传递函数,根据传递函数绘制波特图。
2.把上述测量数据列表,根据此数据画波特图。
3.分析测量误差。
实验四线性系统串联校正
一、实验目的
1.研究串联校正装置对系统动态性能的校正作用。
2.对给定系统进行串联校正设计,并通过模拟实验检验设计的正确性。
二、实验仪器
1.自动控制系统实验箱一台
2.计算机一台
二、
实验内容
已知系统结构如图4-1
给定GO(S)和性能指标要求,设计串联校正GC(S)。
观察PD、PI、PID三种校正方式的作用。
1.不加任何校正,观察系统运动状态,如果接近等幅振荡,记下振荡频率。
图4-2不加任何校正系统结构图
2.串联超前校正
图4-3超前校正系统结构图
3.串联滞后校正
图4-4滞后校正系统结构图
4.串联超前—滞后校正
图5-6超前—滞后校正系统结构图
图4-5超前—滞后校正系统结构图
四、实验步骤
1.启动计算机,在桌面双击图标[自动控制原理实验]运行软件。
2.测试计算机与实验箱的通信是否正常,通信正常继续。
如通信不正常查找原因使通信正常后才可以继续进行实验。
超前校正:
3.连接被测量典型环节的模拟电路(图4-3)。
电路的输入U1接A/D、D/A卡的DA1输出,电路的输出U2接A/D、D/A卡的AD1输入。
检查无误后接通电源。
4.系统加入阶跃信号,测量系统阶跃响应,记录超调量p和调节时间ts。
滞后校正:
5.连接被测量典型环节的模拟电路(图4-4)。
电路的输入U1接A/D、D/A卡的DA1输出,电路的输出U2接A/D、D/A卡的AD1输入。
检查无误后接通电源。
8.系统加入阶跃信号,测量系统阶跃响应,记录超调量p和调节时间ts。
超前--滞后校正
9.连接被测量典型环节的模拟电路(图4-5)。
电路的输入U1接A/D、D/A卡的DA1输出,电路的输出U2接A/D、D/A卡的AD1输入。
检查无误后接通电源。
10.系统加入阶跃信号,测量系统阶跃响应,记录超调量p和调节时间ts。
五、实验报告
1.计算串联校正装置的传递函数Gc(s)和校正网络参数。
2.画出校正后系统的对数坐标图,并求出校正后系统的ω′c及ν′。
3.比较校正前后系统的阶跃响应曲线及性能指标,说明校正装置的作用。
六、预习要求
1.阅读实验指导书,明确校正前系统的ωc及ν。
2.计算串联超前校正装置的传递函数Gc(s)和校正网络参数,并求出校正后系统的ω′c及ν。
实验五MATLAB及仿真实验
学习利用MATLAB进行以下实验,要求熟练掌握以下实验内容中所用到的指令,并按内容要求完成实验。
(一)控制系统的时域分析
一、实验目的
学习利用MATLAB进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性;
二、预习要点
1、系统的典型响应有哪些?
2、如何判断系统稳定性?
3、系统的动态性能指标有哪些?
三、实验方法
(一)四种典型响应
1、阶跃响应:
阶跃响应常用格式:
1、
;其中
可以为连续系统,也可为离散系统。
2、
;表示时间范围0---Tn。
3、
;表示时间范围向量T指定。
4、
;可详细了解某段时间的输入、输出情况。
2、脉冲响应:
脉冲函数在数学上的精确定义:
其拉氏变换为:
所以脉冲响应即为传函的反拉氏变换。
脉冲响应函数常用格式:
①
;
②
③
(二)分析系统稳定性
有以下三种方法:
1、利用pzmap绘制连续系统的零极点图;
2、利用tf2zp求出系统零极点;
3、利用roots求分母多项式的根来确定系统的极点
(三)系统的动态特性分析
Matlab提供了求取连续系统的单位阶跃响应函数step、单位脉冲响应函数impulse、零输入响应函数initial以及任意输入下的仿真函数lsim.
四、实验内容
(一)稳定性
1.系统传函为
,试判断其稳定性
2.用Matlab求出
的极点。
(二)阶跃响应
1.二阶系统
1)键入程序,观察并记录单位阶跃响应曲线
2)计算系统的闭环根、阻尼比、无阻尼振荡频率,并记录
3)记录实际测取的峰值大小、峰值时间及过渡过程时间,并填表:
实际值
理论值
峰值Cmax
峰值时间tp
过渡时间
ts
4)修改参数,分别实现
和
的响应曲线,并记录
5)修改参数,分别写出程序实现
和
的响应曲线,并记录
2.作出以下系统的阶跃响应,并与原系统响应曲线进行比较,作出相应的实验分析结果
(1)
,有系统零点的情况
(2)
,分子、分母多项式阶数相等
(3)
,分子多项式零次项为零
(4)
,原响应的微分,微分系数为1/10
3.单位阶跃响应:
求该系统单位阶跃响应曲线,并在所得图形上加网格线和标题
(三)系统动态特性分析
用Matlab求二阶系统
和
的峰值时间
上升时间
调整时间
超调量
。
五.实验报告要求:
a)完成上述各题
b)分析阻尼比、无阻尼振荡频率对系统阶跃响应和脉冲响应的影响
c)分析零初值、非零初值与系统模型的关系
d)分析响应曲线的稳态值与系统模型的关系
e)分析零极点对系统性能的影响
(二)控制系统的根轨迹
一实验目的
1.利用计算机完成控制系统的根轨迹作图
2.了解控制系统根轨迹图的一般规律
3.利用根轨迹图进行系统分析
二预习要点
1.预习什么是系统根轨迹?
2.闭环系统根轨迹绘制规则。
三实验方法
(一)方法:
当系统中的开环增益k从0到变化时,闭环特征方程的根在复平面上的一组曲线为根轨迹。
设系统的开环传函为:
,则系统的闭环特征方程为:
根轨迹即是描述上面方程的根,随k变化在复平面的分布。
(二)MATLAB画根轨迹的函数常用格式:
利用Matlab绘制控制系统的根轨迹主要用pzmap,rlocus,rlocfind,sgrid函数。
1、零极点图绘制
❑[p,z]=pzmap(a,b,c,d):
返回状态空间描述系统的极点矢量和零点矢量,而不在屏幕上绘制出零极点图。
❑[p,z]=pzmap(num,den):
返回传递函数描述系统的极点矢量和零点矢量,而不在屏幕上绘制出零极点图。
❑pzmap(a,b,c,d)或pzmap(num,den):
不带输出参数项,则直接在s复平面上绘制出系统对应的零极点位置,极点用×表示,零点用o表示。
❑pzmap(p,z):
根据系统已知的零极点列向量或行向量直接在s复平面上绘制出对应的零极点位置,极点用×表示,零点用o表示。
2、根轨迹图绘制
❑rlocus(a,b,c,d)或者rlocus(num,den):
根据SISO开环系统的状态空间描述模型和传递函数模型,直接在屏幕上绘制出系统的根轨迹图。
开环增益的值从零到无穷大变化。
❑rlocus(a,b,c,d,k)或rlocus(num,den,k):
通过指定开环增益k的变化范围来绘制系统的根轨迹图。
❑r=rlocus(num,den,k)或者[r,k]=rlocus(num,den):
不在屏幕上直接绘出系统的根轨迹图,而根据开环增益变化矢量k,返回闭环系统特征方程1+k*num(s)/den(s)=0的根r,它有length(k)行,length(den)-1列,每行对应某个k值时的所有闭环极点。
或者同时返回k与r。
❑若给出传递函数描述系统的分子项num为负,则利用rlocus函数绘制的是系统的零度根轨迹。
(正反馈系统或非最小相位系统)
3、rlocfind()函数
❑[k,p]=rlocfind(a,b,c,d)或者[k,p]=rlocfind(num,den)
它要求在屏幕上先已经绘制好有关的根轨迹图。
然后,此命令将产生一个光标以用来选择希望的闭环极点。
命令执行结果:
k为对应选择点处根轨迹开环增益;p为此点处的系统闭环特征根。
❑不带输出参数项[k,p]时,同样可以执行,只是此时只将k的值返回到缺省变量ans中。
4、sgrid()函数
❑sgrid:
在现存的屏幕根轨迹或零极点图上绘制出自然振荡频率wn、阻尼比矢量z对应的格线。
❑sgrid(‘new’):
是先清屏,再画格线。
❑sgrid(z,wn):
则绘制由用户指定的阻尼比矢量z、自然振荡频率wn的格线。
四实验内容
1.
要求:
(a)记录根轨迹的起点、终点与根轨迹的条数;
(b)确定根轨迹的分离点与相应的根轨迹增益;
(c)确定临界稳定时的根轨迹增益
2.
要求:
确定系统具有最大超调量时的根轨迹增益;
3.绘制下列各系统根轨迹图。
4.绘制下列各系统根轨迹图。
开环传递函数:
(1)
;
(2)
5.试绘制下面系统根轨迹图
五实验报告要求
(a)记录与显示给定系统根轨迹图
(b)完成上述各题
(三)控制系统的频域分析
一实验目的
1.利用计算机作出开环系统的波特图
2.观察记录控制系统的开环频率特性
3.控制系统的开环频率特性分析
二预习要点
1.预习Bode图和Nyquist图的画法;
2.映射定理的内容;
3.Nyquist稳定性判据内容。
三实验方法
1、奈奎斯特图(幅相频率特性图)
❑对于频率特性函数G(jw),给出w从负无穷到正无穷的一系列数值,分别求出Im(G(jw))和Re(G(jw))。
以Re(G(jw))为横坐标,Im(G(jw))为纵坐标绘制成为极坐标频率特性图。
MATLAB提供了函数nyquist()来绘制系统的极坐标图,其用法如下:
❑nyquist(a,b,c,d):
绘制出系统的一组Nyquist曲线,每条曲线相应于连续状态空间系统[a,b,c,d]的输入/输出组合对。
其中频率范围由函数自动选取,而且在响应快速变化的位置会自动采用更多取样点。
❑nyquist(a,b,c,d,iu):
可得到从系统第iu个输入到所有输出的极坐标图。
❑nyquist(num,den):
可绘制出以连续时间多项式传递函数表示的系统的极坐标图。
❑nyquist(a,b,c,d,iu,w)或nyquist(num,den,w):
可利用指定的角频率矢量绘制出系统的极坐标图。
❑当不带返回参数时,直接在屏幕上绘制出系统的极坐标图(图上用箭头表示w的变化方向,负无穷到正无穷)。
当带输出变量[re,im,w]引用函数时,可得到系统频率特性函数的实部re和虚部im及角频率点w矢量(为正的部分)。
可以用plot(re,im)绘制出对应w从负无穷到零变化的部分。
2、对数频率特性图(波特图)
对数频率特性图包括了对数幅频特性图和对数相频特性图。
横坐标为频率w,采用对数分度,单位为弧度/秒;纵坐标均匀分度,分别为幅值函数20lgA(w),以dB表示;相角,以度表示。
MATLAB提供了函数bode()来绘制系统的波特图,其用法如下:
❑bode(a,b,c,d,iu):
可得到从系统第iu个输入到所有输出的波特图。
bode(a,求取系统对数频率特性图(波特图):
bode()
求取系统奈奎斯特图(幅相曲线图或极坐标图):
nyquist()b,c,d):
自动绘制出系统的一组Bode图,它们是针对连续状态空间系统[a,b,c,d]的每个输入的Bode图。
其中频率范围由函数自动选取,而且在响应快速变化的位置会自动采用更多取样点。
❑bode(num,den):
可绘制出以连续时间多项式传递函数表示的系统的波特图。
❑bode(a,b,c,d,iu,w)或bode(num,den,w):
可利用指定的角频率矢量绘制出系统的波特图。
❑当带输出变量[mag,pha,w]或[mag,pha]引用函数时,可得到系统波特图相应的幅值mag、相角pha及角频率点w矢量或只是返回幅值与相角。
相角以度为单位,幅值可转换为分贝单位:
magdb=20×log10(mag)
四实验内容
1.用Matlab作Bode图.要求:
画出对应Bode图,并加标题.
(1)
(2)
2.用Matlab作Nyquist图.要求画对应Nyquist图,并加网格标题.
3.典型二阶系统
,试绘制
取不同值时的Bode图。
取
。
4.某开环传函为:
,试绘制系统的Nyquist曲线,并判断闭环系统稳定性,最后求出闭环系统的单位脉冲响应。
5.
6.
要求:
(a)作波特图
(b)由稳定裕度命令计算系统的稳定裕度
和
,并确定系统的稳定性
(c)在图上作近似折线特性,与原准确特性相比
7.已知系统结构图如图所示:
其中:
(1)
(2)
要求:
(a)作波特图,并将曲线保持进行比较
(b)分别计算两个系统的稳定裕度值,然后作性能比较
五实验报告要求
(a)记录与显示给定系统波特图、极坐标图
(b)完成上述各题
注:
实验五所含各项实验,要求学生在教师的指导下,以自学为主的方式进行。
实验过程和结果的检查与考核由教师根据学生学习情况自定。
 升级会员
升级会员 