电气实训指导书.docx
《电气实训指导书.docx》由会员分享,可在线阅读,更多相关《电气实训指导书.docx(88页珍藏版)》请在冰豆网上搜索。
电气实训指导书
第一章小皮带线单元
本系统各单元采用西门子CPU226作为控制部件,各单元之间可以互相通讯。
在系统中采用了大量的气动原件、传感器、步进电机和异步电机等。
1.1西门子CPU226可编程控制器及网络
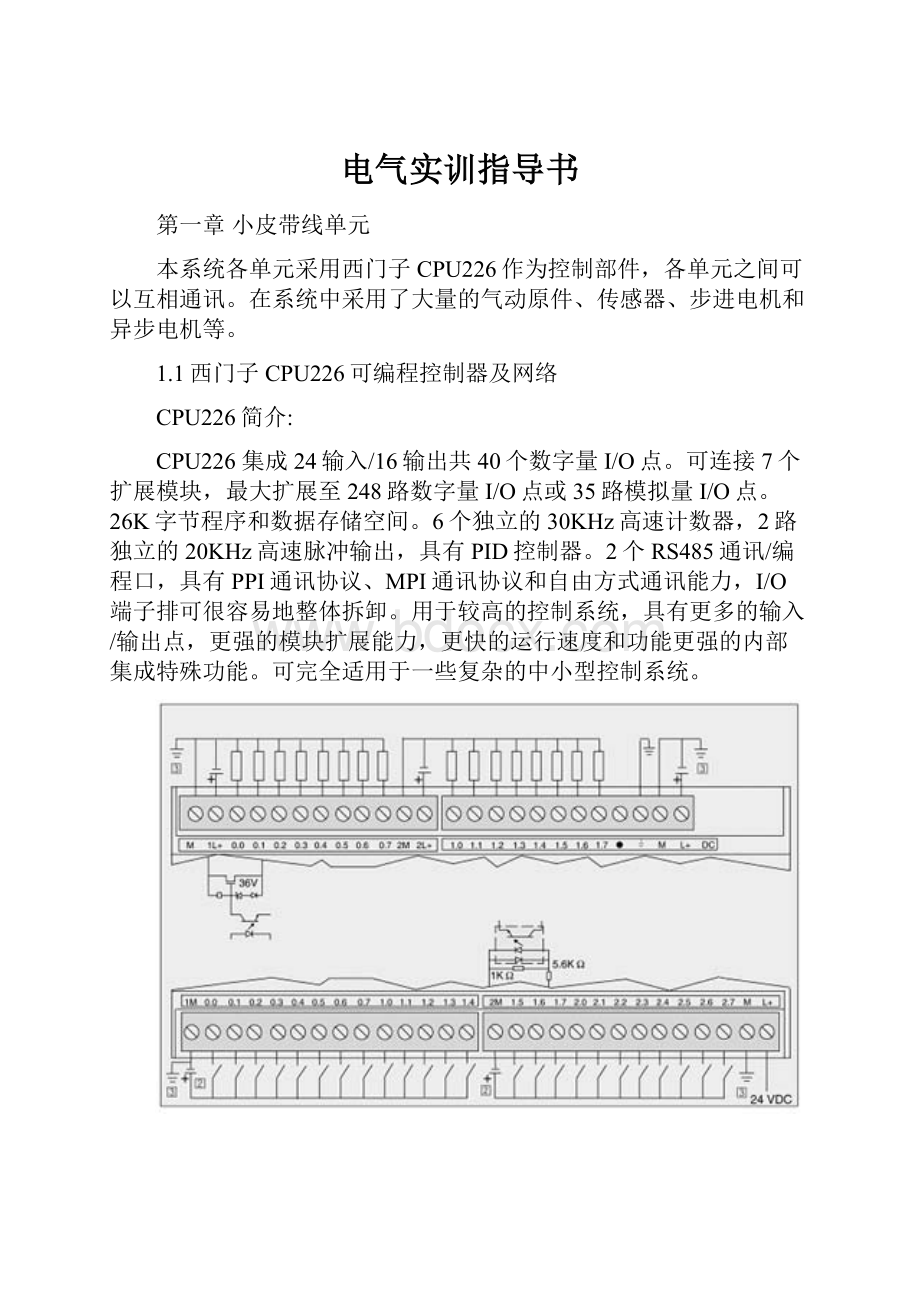
CPU226简介:
CPU226集成24输入/16输出共40个数字量I/O点。
可连接7个扩展模块,最大扩展至248路数字量I/O点或35路模拟量I/O点。
26K字节程序和数据存储空间。
6个独立的30KHz高速计数器,2路独立的20KHz高速脉冲输出,具有PID控制器。
2个RS485通讯/编程口,具有PPI通讯协议、MPI通讯协议和自由方式通讯能力,I/O端子排可很容易地整体拆卸。
用于较高的控制系统,具有更多的输入/输出点,更强的模块扩展能力,更快的运行速度和功能更强的内部集成特殊功能。
可完全适用于一些复杂的中小型控制系统。
实训一磁性传感器实训
一、实训目的
1.掌握磁性传感器的电气原理和接线
二、实训设备
磁性传感器、指示灯
三、实训原理
磁性传感器原理:
当有磁性材料接近磁性传感器的时,它的常开触点就闭合,同时磁性传感器的指示灯亮。
四、实训步骤
1.为了方便学生实训,各传感器的线都已经引到接线端子上了。
点动按钮、指示灯也将其两端引到电气柜的接线端子上了。
2.操作步骤
关掉电源,将磁性传感器开关的24V端(棕色)与电源正极相连,信号端(蓝色)与指示灯的一端相连,再将指示灯的另一端与电源的负极相连。
打开总电源。
接线表如下:
将气缸移动到相应磁性传感器位置,观察指示灯是否点亮。
在点亮指示灯的同时,磁性传感器本身的指示灯也应被点亮。
关掉电源,将磁性传感器的24V端(棕色)与指示灯的一端相连,信号端(蓝色)与电源正极端相连,再将指示灯的另一端与电源的负极相连。
将气缸移动到相应磁性传感器位置,观察指示灯是否点亮。
在点亮指示灯的同时,磁性传感器本身的指示灯是否被点亮。
五、注意事项
1.请爱护设备。
2.未经老师同意不要随便移动传感器的位置。
六、思考题
磁性传感器主要应用在哪些方面?
实训二电容传感器实训
一、实训目的
1.掌握电容传感器的电气原理和接线
二、实训设备
电容传感器、指示灯
三、实训原理
1.电容传感器原理图及接线图
电容传感器简要原理图及接线图
当被测物接近传感器(检测范围内)时输出信号。
其可以所有物体,对不同材料的检测距离不相同。
四、实训步骤
1.为了方便学生实训,各传感器的线都已经引到接线端子上了。
点动按钮、指示灯也将其两端引到电气柜的接线端子上了。
2.操作步骤
将传感器的24V端(棕色)与24V电源的正极相连;传感器的0V端(蓝色)与24V电源的负极相连;输出端(黑色)与指示灯的端子相连;再将指示灯的另一端子与电源的负极相连。
接线如图:
用手、工件或其他物体放在传感器检测位置,观察指示灯是否点亮。
如果没有检测到信号,调整传感器的位置或调节灵敏度
观察并记录接收器“动作指示灯”以及“指示灯”的动作。
五、实训记录
记录接收器“动作指示灯”以及“指示灯”的动作。
六、注意事项
1.请爱护设备。
2.未经老师同意不要随便移动传感器的位置。
七、思考题
电容传感器主要应用在哪些方面?
实训三电感传感器实训
一、实训目的
1.掌握电感传感器的电气原理和接线
二、实训设备
电感传感器、指示灯
三、实训原理
1.电感传感器原理图及接线图
电感型光电传感器简要原理图及接线图
当被测物接近传感器(检测范围内)时输出信号。
其可以检测金属和非金属,对不同材料的检测距离不相同。
四、实训步骤
1.为了方便学生实训,各传感器的线都已经引到接线端子上了。
点动按钮、指示灯也将其两端引到电气柜的接线端子上了。
2.操作步骤
将传感器的24V端(棕色)与24V电源的正极相连;传感器的0V端(蓝色)与24V电源的负极相连;输出端(黑色)与指示灯的端子相连;再将指示灯的另一端子与电源的负极相连。
接线如图:
用手、工件或其他物体放在传感器检测位置,观察指示灯是否点亮。
如果没有检测到信号,调整传感器的位置或调节灵敏度。
观察并记录接收器“动作指示灯”以及“指示灯”的动作。
五、实训记录
记录接收器“动作指示灯”以及“指示灯”的动作。
六、注意事项
1.请爱护设备。
2.未经老师同意不要随便移动传感器的位置。
七、思考题
电感传感器主要应用在哪些方面?
实训四光电传感器实训
一、实训目的
1.掌握光电传感器的电气原理和接线
二、实训设备
光电传感器、指示灯
三、实训原理
1.光电传感器原理图及接线图
光电传感器简要原理图及接线图
当被测物接近传感器(检测范围内)时输出信号。
其可以所有物体,对不同材料的检测距离不相同。
四、实训步骤
1.为了方便学生实训,各传感器的线都已经引到接线端子上了。
点动按钮、指示灯也将其两端引到电气柜的接线端子上了。
2.操作步骤
将传感器的24V端(棕色)与24V电源的正极相连;传感器的0V端(蓝色)与24V电源的负极相连;输出端(黑色)与指示灯的端子相连;再将指示灯的另一端子与电源的负极相连。
接线如图:
用手、工件或其他物体放在传感器检测位置,观察指示灯是否点亮。
如果没有检测到信号,调整传感器的位置或调节灵敏度
观察并记录接收器“动作指示灯”以及“指示灯”的动作。
五、实训记录
记录接收器“动作指示灯”以及“指示灯”的动作。
六、注意事项
1.请爱护设备。
2.未经老师同意不要随便移动传感器的位置。
七、思考题
1.光电传感器主要应用在哪些方面?
2.传感器是常开的还是常闭的
实训五PLC与传感器综合实训
一、实训目的
1.掌握光电传感器与PLC的连接
2.掌握电容传感器与PLC的连接
3.掌握电感传感器与PLC的连接
4.掌握磁性传感器与PLC的连接
二、实训原理
1.CPU数字输入/输出点
24V输入点的基本原理图(漏型接法)
24V输入/输出点的基本原理图(源型接法)
对于大多数输入来讲,都是24VDC输入,因为S7-200的数字量输入点内部为双向二级管,可以接成漏型或源型,只要每一组接成一样就行。
对于数字量输入电路来说,关键是构成电流回路。
输入点可以分组接不同的电源,这些电源之间没有联系也可以。
CPU226外围典型接线图
2.传感器
电感传感器、电容传感器、光电传感器都具有开关特性,可以当作开关器件用作数字输入设备。
而磁性传感器本身就是一个开关器件,是一个典型的数字输入设备。
三、实训步骤
1.为了方便学生实训,各传感器的线都已经引到接线端子上了。
点动按钮、指示灯也将其两端引到电气柜的接线端子上了。
2.磁性传感器与PLC连接
关掉电源,将磁性传感器的24V端(棕色)与电源正极相连,信号端(蓝色)与PLC的输入点相连,再将PLC的公共端(1M)和与电源的负极相连。
打开总电源。
接线图如下:
参考程序:
将气缸移动到相应磁性传感器位置,观察PLC输入点的指示灯是否点亮。
在点亮指示灯的同时,磁性传感器本身的指示灯也应被点亮,相应观察PLC输出点的指示灯是否点亮。
3.电感传感器、电容传感器、光电传感器与PLC连接
关掉控制台电源,将传感器的24V端(棕色)与电源正极相连,信号端黑色与PLC的输入点(如电感传感器用I0.0,电容传感器用I0.2)的一端相连,传感器的0V端(蓝色)和电源的负极相连,再将PLC的公共端(1M)与电源的负极相连。
打开电源。
接线图如下:
●编写程序
参考程序:
●用手、工件或其他物体放在传感器检测位置,观察PLC输出点的指示灯是否点亮。
四、实训记录(报告)
记录接线的过程,接线中出现的问题及解决问题的过程。
五、注意事项
1.请不要在通电的情况下进行接线。
2.在未经老师同意时,请不要移动传感器的位置。
3.请爱护设备。
六、思考题
设计各传感器与PLC源型接法的电路图并进行连接。
实训六气源处理系统
一、实训要求
气源处理认识、实训
二、实训内容
气源处理设备连接与操作使用
三、实训步骤
1、本实训配置了空气压缩机、输送压缩空气的气管和气源处理三联件,将上面三个设备连接起来,将三联件右边的出气口与电磁阀接;
2、将压缩机电源插头通上电源;
3、将压缩机红色按钮拔起,压缩机启动,三联件上压力表将指示出气口压力值;
4、将三联件中间调节旋钮上拉,然后左右旋转旋钮,压力表数值将发生变换,将压力表数值调节到2公斤,将旋钮按下。
四、实训总结
描述整个实训过程,并将实训中压力表变化记录下来。
实训七气动元件的调节
一、实训要求
认识气动元件的调节方法;
二、实训内容
将气动元件通过手动调节阀给定合适的气压(使运行过程尽量柔和);
三、实训步骤
1、实训配置了空气压缩机、输送压缩空气的气管和气源处理三联件,将上面三个设备连接起来,将三联件右边的出气口与电磁阀接。
(系统中的各气动元件的与各种气缸的连接气管已经连接好);
2、按照实训一的方法将气压调至2公斤;
3、根据气管标号寻找气缸对应的手动电磁阀;
4、通过按电磁阀上面的手动按钮,找到对应的气缸(前提是保证手动调节阀都有一定的开度);
5、按照第三步的方法将各气缸调节好。
四、实训总结
描述整个实训过程,体会手动调节阀控制气体流量以及用电磁阀控制气体开度的方法。
实训八气缸控制实训
一、实训目的
1.熟悉STEP7—Micro/WIN32编程软件
2.上机编制简单的梯形图程序
3.进一步掌握编程软件与PLC的连接和程序的调试方法和步骤
4.了解电磁阀、气缸的工作原理
5.熟悉STEP7—Micro/WIN32编程软件符号表的使用
二、实训原理
1.电磁阀、气缸
简单气路图
上图为一个简单的气路图。
上图中的电磁阀全称为先导式电磁换向阀。
它是得用电磁力的作用推动阀心换向,从而改变气流的流动方向。
从上图可以看出,在电磁阀未通电时高压气体从A流向气缸的左气腔(有杆气腔),气缸处于收缩状态。
当电磁阀通电时A、B的气流流向发生改变,高压气体从B流向气缸的右气腔(无杆气腔),气缸处于升长状态。
因此控制电磁阀的通断就可以控制气缸升缩。
四、实训步骤
1.预备知识
为了方便学生实训,各传感器的线都已经引到接线端子上了。
点动按钮也将其两端引到电气柜的接线端子上了
2.电磁阀与PLC的连接
接线图
关掉电源,按参考接线图连接好实训导线。
连接PLC电源线。
打开总电源、电磁阀电源。
3.编辑、下载、调试程序
按SB1气缸动作,按SB2气缸复位
SB1(启动推工件)
I0.0
SB2(缩回气缸)
I0.1
气缸一
Q0.0
在实际操作中可以先分配I/O表再确定接线图,也可以根据接线图来确定I/O表。
编辑并下载程序。
参考程序:
四、实训记录(报告)
1、简述电磁阀的工作原理
2、记录程序调试的过程,调试中出现的问题及解决问题的过程。
3、整理出运行调试后的程序。
五、注意事项
1.请不要在通电的情况下进行接线。
2.在未经老师同意时,请不要移动传感器的位置。
3.请爱护设备。
实训九皮带线正反转控制实训
一、实训目的
1.熟悉STEP7—Micro/WIN32编程软件
2.上机编制简单的梯形图程序
3.进一步掌握编程软件与PLC的连接和程序的调试方法和步骤
4.熟悉STEP7—Micro/WIN32编程软件符号表的使用
二、实训原理
1.永磁低速同步电机
永磁低速同步电动机
永磁低速同步电动机接线图
永磁低速同步电动机是一种无减速齿轮装置由电机直接得到低转速(60转/分)的新型同步电动机。
应用本产品可简化传动机构,免除齿轮减速机构的噪声。
其特点:
可靠性高,使用寿命长,运行时振动小、噪音低,转速稳定,启动力矩大,启动时电流无冲击,负载变化时电流变化极小,具有一定的自锁能力;且能瞬间启动、倒转和停机等。
此款电机可作为低速驱动系统中的驱动元件。
凡需要低速直接传动的场合,均可采用本产品,若配以变频电源,则可变换电机转速以适合各种需要。
四、实训步骤
1.预备知识
为方便接线,系统已将电机的电源线和继电器控制线引到接线端子上,因此要按电路图接线。
本系统的电机正反转的设计是:
KA1接通时电机正转,KA1和KA2同时接通时,电机反转。
2.继电器与PLC的连接
接线图
关掉控制台电源,按参考接线图连接好实训导线。
连接PLC电源线。
打开总电源、开关电源的电源。
3.编辑、下载、调试程序
按SB1电机正转,按下SB3电机停止;按SB2电机正转,按下SB3电机停止。
SB1(电机正转)
I0.0
SB2(电机反转)
I0.1
SB3(电机停止)
I0.2
KA1
Q0.0
KA2
Q0.1
在实际操作中可以先分配I/O表再确定接线图,也可以根据接线图来确定I/O表。
编辑并下载程序。
参考程序:
四、实训记录(报告)
1、记录程序调试的过程,调试中出现的问题及解决问题的过程。
2、整理出运行调试后的程序。
五、注意事项
1.请不要在通电的情况下进行接线。
2.在未经老师同意时,请不要移动传感器的位置。
3.请爱护设备。
实训十工件分拣全自动控制编程实训
一、实训目的
1.熟悉STEP7—Micro/WIN32编程软件
2.上机编制简单的梯形图程序
3.熟悉皮带线全自动工件分拣的编程过程
二、实训原理
1电感、电容、光电传感器
电感、电容、光电传感器也分为NPN和PNP两种类型。
在本系统中只使用了PNP型。
当被测物接近传感器时输出信号,PNP型在没有检测到物体时输出为低电平状态,检测到物体时输出为高电平状态。
2.磁性传感器
又名磁性开关。
是在接触到有一定磁性的物质后而导通的传感器。
在本系统中用来检测气缸的位置。
三、实训步骤
1.I/O分配表:
SB1(停止)
I0.0
SB2(启动)
I0.1
气缸一前限位(磁性开关)
I0.2
气缸一后限位(磁性开关)
I0.3
气缸二前限位(磁性开关)
I0.4
气缸二后限位(磁性开关)
I0.5
金属到位(电容传感器)
I0.6
金属检测(电感传感器)
I0.7
白色到位(电容传感器)
I1.0
颜色检测(光电传感器)
I1.1
皮带线启动
Q0.0
气缸一
Q0.1
气缸二
Q0.2
在实际操作中可以先分配I/O表再确定接线图,也可以根据接线图来确定
2.接线(请看附录)
3.编辑、下载、调试程序
四、实训记录(报告)
1.记录调试的过程,调试中出现的问题及解决问题的过程。
2.整理出运行调试后的程序。
五、注意事项
1.请不要在通电的情况下进行接线。
2.在未经老师同意时,请不要移动传感器的位置。
3.请爱护设备。
六、思考题
1.给参考程序写上注释。
2.中间辅助继电器在程序中起到什么作用。
七、参考程序:
第二章机械手单元
本系统各单元采用西门子CPU226作为控制部件。
在系统中采用了气动元件、电磁阀、传感器、直流电机、继电器等。
1.1CPU226简介
CPU226集成24输入/16输出共40个数字量I/O点。
可连接7个扩展模块,最大扩展至248路数字量I/O点或35路模拟量I/O点。
26K字节程序和数据存储空间。
6个独立的30KHz高速计数器,2路独立的20KHz高速脉冲输出,具有PID控制器。
2个RS485通讯/编程口,具有PPI通讯协议、MPI通讯协议和自由方式通讯能力,I/O端子排可很容易地整体拆卸。
用于较高的控制系统,具有更多的输入/输出点,更强的模块扩展能力,更快的运行速度和功能更强的内部集成特殊功能。
可完全适用于一些复杂的中小型控制系统。
1.2传感器和气动元件
传感器有时也被称为换能器、变换器、变送器或探测器,主要特征是能感知和检测某一形态的信息,并将其转换成另一形态的信息。
传感器的种类繁多,分类方法多样,可按被测量分类、按传感器的工作原理分类、按能量传递方式分类,按输出信号性质分类。
传感器按工作原理分类可分为:
电阻应变式传感器、电容式传感器、电感式传感器、压电式传感器、霍尔式传感器、光电式传感器、热敏式传感器。
按工作原理分类的优点是可以避免传感器名目繁多,使传感器的划分类较少,并有利与传感器专业工作者对传感器的工作原理与设计归纳性的分析研究,使设计与应用更具有合理性与灵活性,,缺点是会使对传感器不够了解的用户感到使用不方便。
气动传动是以压缩空气为工作介质进行能量传递的一种传动形式。
气动传动系统由以下四部分组成:
1、动力元件它将原动机供给的能量转变位气体的压力能,为各类气动设备提供动力。
2、执行元件如气缸和气动马达。
它能将气体的压力能转换为机械能,输出力和速度,以驱动工作部件。
3、控制元件用以控制压缩空气的压力、流量和流动方向,以保证执行元件具有一定的输出力和速度。
这类元件包括压力阀、方向阀、流量阀和逻辑元件等。
4、辅助元件除以上三类元件以外,其余元件称为辅助元件。
如过滤器、干燥器、消音器、油雾器和管件等。
它们对保证系统可靠、稳定地工作起着重要的作用。
在本系统中气缸与电磁阀是SMC的产品,气缸有标准气缸、双杆气缸、微型气缸。
单元配置
2.1接线表
IO明细表
2009.2.24
序号
描述
接线
信号来源
1
停止
I0.0
外置按钮
2
复位
I0.1
外置按钮
3
启动
I0.2
外置按钮
4
原点
I0.3
电容传感器
5
角度
I0.4
电感传感器
6
前限位
I0.5
磁性开关
7
后限位
I0.6
磁性开关
8
上限位
I0.7
磁性开关
9
下限位
I1.0
磁性开关
序号
描述
接线
控制对象
10
电机启动
Q0.0
继电器
11
电机反转
Q0.0
Q0.1
继电器
12
前后气缸
Q0.2
电磁阀
15
上下气缸
Q0.3
电磁阀
16
气动手指
Q0.4
电磁阀
2.2工作流程
本系统要配一个PLC、一个压缩气源、三个开关按钮、导线若干。
机械手在原点抓起工件再把工件依次移到相对数字的位置上。
具体步骤
1停止给下一下复位做好前提条件
2复位机械手反转原点传感器检测到挡块机械手停止
3启动上下气缸下降
4到达下限位夹紧工件上下气缸上升
5到达上限位机械手正转
6到达第一个位置上下气缸下降
7到达下限位放开工件上下气缸上升
8到达上限位机械手反转
9到达原点重复抓工件过程
10机械手正转到达第二个位置前后气缸伸出
11到达前限位重复放工件过程
12放完工件后前后气缸缩回
13重复抓工件过程
2.3主电路图
2.4传感器电路图:
2.5气路图
实训一电容、电感、磁性传感器原理与接线
一、实训目的
1.掌握电感传感器的电气原理和接线。
2.掌握电容传感器的电气原理和接线。
3.掌握磁性传感器的电气原理和接线。
二、实训原理
1.电容传感器
电容传感器基本原理图及接线图
电容传感器也分为NPN和PNP两种类型。
在本系统中只使用了PNP型。
当被测物接近传感器时输出信号,PNP型在没有检测到物体时输出为低电平状态,检测到物体时输出为高电平状态。
2.电感传感器
电感传感器基本原理图及接线图
电感传感器也分为NPN和PNP两种类型。
在本系统中只使用了PNP型。
当被测物接近传感器(检测范围内)时输出信号,PNP型在没有检测到金属时输出为低电平状态,检测到金属时输出为高电平状态。
3.磁性传感器
又名磁性开关。
是在接触到有一定磁性的物质后而导通的传感器。
在本系统中用来检测气缸的位置。
三、实训步骤
1.为了方便学生实训,各传感器的线都已经引到接线端子上了。
2.磁性传感器的工作原理
关掉控制台电源,将磁性传感器开关的24V端(棕色)与电源正极相连,信号端(蓝色)与指示灯的一端相连,再将指示灯的另一端与电源的负极相连。
打开总电源。
接线表如下:
将气缸移动到相应磁性传感器位置,观察指示灯是否点亮。
在点亮指示灯的同时,磁性传感器本身的指示灯也应被点亮。
关掉控制台电源,将磁性传感器的24V端(棕色)与指示灯的一端相连,信号端(蓝色)与电源正极端相连,再将指示灯的另一端与电源的负极相连。
将气缸移动到相应磁性传感器位置,观察指示灯是否点亮。
在点亮指示灯的同时,磁性传感器本身的指示灯是否被点亮。
3.电感传感器和电容传感器的开关特性
关掉控制台电源,将传感器的24V端(棕色)与电源正极相连,0V端(蓝色)与电源的负极相连,信号端(黑色)与指示灯的一端相连,再将指示灯的另一端与电源的负极相连。
打开总电源和传感器电源。
接线表如下:
用手、工件或其他物体放在传感器检测位置,电感传感器的可以用手转动转盘,观察指示灯是否点亮。
四、实训记录(报告)
1、记录磁性传感器的24V端和信号端正接和反接的不同现象
2、简述变电感传感器和电容传感器开关特性的实现。
五、注意事项
1.请不要在通电的情况下进行接线。
2.在未经老师同意时,请不要移动传感器的位置。
3.请爱护设备。
实训二PLC与传感器综合实训
一、实训目的
1.掌握电容传感器与PLC的连接
2.掌握电感传感器与PLC的连接
3.掌握磁性传感器与PLC的连接
二、实训原理
1.CPU数字输入/输出点
24V输入点的基本原理图(漏型接法)
24V输入/输出点的基本原理图(源型接法)
对于大多数输入来讲,都是24VDC输入,因为S7-200的数字量输入点内部为双向二级管,可以接成漏型或源型,只要每一组接成一样就行。
对于数字量输入电路来说,关键是构成电流回路。
输入点可以分组接不同的电源,这些电源之间没有联系也可以。
CPU226外围典型接线图
2.传感器
电感传感器、电容传感器都具有开关特性(详见实训一),可以当作开关器件用作数字输入设备。
而磁性传感器本身就是一个开关器件,是一个典型的数字输入设备。
三、实训步骤
1.为了方便学生实训,各传感器的线都已经引到接线端子上了。
点动按钮、指示灯也将其两端引到电气柜的接线端子上了。
2.磁性传感器与PLC连接
关掉电源,将磁性传感器的24V端(棕色)与电源正极相连,信号端(蓝色)与PLC的输入点相连,再将PLC的公共端(1M)和与电源的负极相连。
打开总电源。
接线图如下:
参考程序:
将气缸移动到相应磁性传感器位置,观察PLC输入点的指示灯是否点亮。
在点亮指示灯的同时,磁性传感器本身的指示灯也应被点亮,相应观察PLC输出点的指示灯是否点亮。
3.电感传感器和电容传感器与PLC连接
关掉控制台电源,将传感器的24V端(棕色)与电源正极相连,信号端黑色与PLC的输入点(如电感传感器用I0.0,电容传感器用I0.2)的一端相连,传感器的0V端(蓝色)和电源的负极相连,再将PLC的公共端(1M)与电源的负极相连。
打开电源。
接线图如下:
●编写程序
参考程序:
●用手、工件或其他物体放在电容传感器检测位置,电感传感器可以转
 升级会员
升级会员 