PID控制算法的C语言实现完整版.docx
《PID控制算法的C语言实现完整版.docx》由会员分享,可在线阅读,更多相关《PID控制算法的C语言实现完整版.docx(181页珍藏版)》请在冰豆网上搜索。
PID控制算法的C语言实现完整版
PID控制算法的C语言实现一PID算法原理
最近两天在考虑一般控制算法的C语言实现问题,发现网络上尚没有一套完整的比较体系的讲解。
于是总结了几天,整理一套思路分享给大家。
在工业应用中PID及其衍生算法是应用最广泛的算法之一,是当之无愧的万能算法,如果能够熟练掌握PID算法的设计与实现过程,对于一般的研发人员来讲,应该是足够应对一般研发问题了,而难能可贵的是,在我所接触的控制算法当中,PID控制算法又是最简单,最能体现反馈思想的控制算法,可谓经典中的经典。
经典的未必是复杂的,经典的东西常常是简单的,而且是最简单的,想想牛顿的力学三大定律吧,想想爱因斯坦的质能方程吧,何等的简单!
简单的不是原始的,简单的也不是落后的,简单到了美的程度。
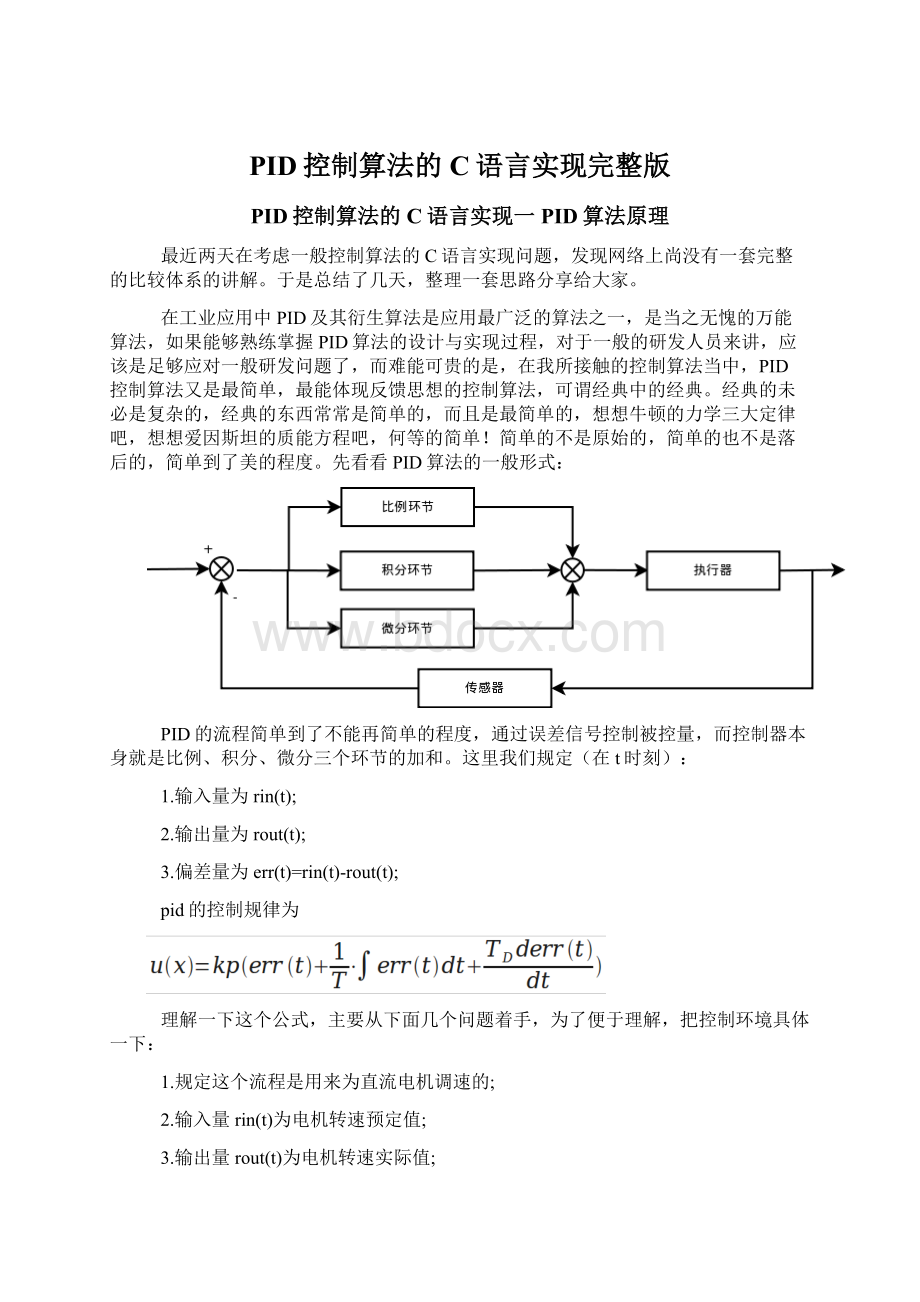
先看看PID算法的一般形式:
PID的流程简单到了不能再简单的程度,通过误差信号控制被控量,而控制器本身就是比例、积分、微分三个环节的加和。
这里我们规定(在t时刻):
1.输入量为rin(t);
2.输出量为rout(t);
3.偏差量为err(t)=rin(t)-rout(t);
pid的控制规律为
理解一下这个公式,主要从下面几个问题着手,为了便于理解,把控制环境具体一下:
1.规定这个流程是用来为直流电机调速的;
2.输入量rin(t)为电机转速预定值;
3.输出量rout(t)为电机转速实际值;
4.执行器为直流电机;
5.传感器为光电码盘,假设码盘为10线;
6.直流电机采用PWM调速转速用单位转/min表示;
不难看出以下结论:
1.输入量rin(t)为电机转速预定值(转/min);
2.输出量rout(t)为电机转速实际值(转/min);
3.偏差量为预定值和实际值之差(转/min);
那么以下几个问题需要弄清楚:
1.通过PID环节之后的U(t)是什么值呢?
2.控制执行器(直流电机)转动转速应该为电压值(也就是PWM占空比)。
3.那么U(t)与PWM之间存在怎样的联系呢?
PID控制算法的C语言实现二PID算法的离散化
上一节中,我论述了PID算法的基本形式,并对其控制过程的实现有了一个简要的说明,通过上一节的总结,基本已经可以明白PID控制的过程。
这一节中先继续上一节内容补充说明一下。
1.说明一下反馈控制的原理,通过上一节的框图不难看出,PID控制其实是对偏差的控制过程;
2.如果偏差为0,则比例环节不起作用,只有存在偏差时,比例环节才起作用。
3.积分环节主要是用来消除静差,所谓静差,就是系统稳定后输出值和设定值之间的差值,积分环节实际上就是偏差累计的过程,把累计的误差加到原有系统上以抵消系统造成的静差。
4.而微分信号则反应了偏差信号的变化规律,或者说是变化趋势,根据偏差信号的变化趋势来进行超前调节,从而增加了系统的快速性。
好了,关于PID的基本说明就补充到这里,下面将对PID连续系统离散化,从而方便在处理器上实现。
下面把连续状态的公式再贴一下:
假设采样间隔为T,则在第KT时刻:
偏差err(K)=rin(K)-rout(K);
积分环节用加和的形式表示,即err(K)+err(K+1)+……;
微分环节用斜率的形式表示,即[err(K)-err(K-1)]/T;
从而形成如下PID离散表示形式:
则u(K)可表示成为:
至于说Kp、Ki、Kd三个参数的具体表达式,我想可以轻松的推出了,这里节省时间,不再详细表示了。
其实到这里为止,PID的基本离散表示形式已经出来了。
目前的这种表述形式属于位置型PID,另外一种表述方式为增量式PID,由U上述表达式可以轻易得到:
那么:
这就是离散化PID的增量式表示方式,由公式可以看出,增量式的表达结果和最近三次的偏差有关,这样就大大提高了系统的稳定性。
需要注意的是最终的输出结果应该为
u(K)+增量调节值;
PID的离散化过程基本思路就是这样,下面是将离散化的公式转换成为C语言,从而实现微控制器的控制作用。
PID控制算法的C语言实现三位置型PID的C语言实现
上一节中已经抽象出了位置性PID和增量型PID的数学表达式,这一节,重点讲解C语言代码的实现过程,算法的C语言实现过程具有一般性,通过PID算法的C语言实现,可以以此类推,设计其它算法的C语言实现。
第一步:
定义PID变量结构体,代码如下:
struct_pid{
floatSetSpeed; //定义设定值
floatActualSpeed; //定义实际值
floaterr; //定义偏差值
floaterr_last; //定义上一个偏差值
floatKp,Ki,Kd; //定义比例、积分、微分系数
floatvoltage; //定义电压值(控制执行器的变量)
floatintegral; //定义积分值
}pid;
控制算法中所需要用到的参数在一个结构体中统一定义,方便后面的使用。
第二部:
初始化变量,代码如下:
voidPID_init(){
printf("PID_initbegin\n");
pid.SetSpeed=0.0;
pid.ActualSpeed=0.0;
pid.err=0.0;
pid.err_last=0.0;
pid.voltage=0.0;
pid.integral=0.0;
pid.Kp=0.2;
pid.Ki=0.015;
pid.Kd=0.2;
printf("PID_initend\n");
}
统一初始化变量,尤其是Kp,Ki,Kd三个参数,调试过程当中,对于要求的控制效果,可以通过调节这三个量直接进行调节。
第三步:
编写控制算法,代码如下:
floatPID_realize(floatspeed){
pid.SetSpeed=speed;
pid.err=pid.SetSpeed-pid.ActualSpeed;
pid.integral+=pid.err;
pid.voltage=pid.Kp*pid.err+pid.Ki*pid.integral+pid.Kd*(pid.err-pid.err_last);
pid.err_last=pid.err;
pid.ActualSpeed=pid.voltage*1.0;
returnpid.ActualSpeed;
}
注意:
这里用了最基本的算法实现形式,没有考虑死区问题,没有设定上下限,只是对公式的一种直接的实现,后面的介绍当中还会逐渐的对此改进。
到此为止,PID的基本实现部分就初步完成了。
下面是测试代码:
intmain(){
printf("Systembegin\n");
PID_init();
intcount=0;
while(count<1000)
{
floatspeed=PID_realize(200.0);
printf("%f\n",speed);
count++;
}
return0;
}
下面是经过1000次的调节后输出的1000个数据(具体的参数整定过程就不说明了,网上这种说明非常多):
83.000001
11.555000
59.559675
28.175408
52.907421
38.944152
51.891699
46.141651
53.339054
51.509998
55.908450
55.944631
58.970680
59.882936
62.225001
63.537254
65.527707
67.011058
68.810646
70.355318
72.042040
73.595658
75.207620
76.745444
78.301526
79.812136
81.321929
82.800304
84.268909
85.713108
87.143455
88.553005
89.946960
91.322078
92.680996
94.022234
95.347186
96.655242
97.947180
99.222808
100.482601
101.726572
102.955049
104.168125
105.366066
106.549019
107.717187
108.870756
110.009898
111.134811
112.245652
113.342615
114.425860
115.495564
116.551897
117.595029
118.625116
119.642331
120.646826
121.638767
122.618307
123.585603
124.540813
125.484079
126.415549
127.335383
128.243715
129.140691
130.026459
130.901149
131.764909
132.617870
133.460162
134.291942
135.113308
135.924419
136.725382
137.516332
138.297401
139.068697
139.830352
140.582499
141.325237
142.058701
142.782985
143.498218
144.204509
144.901969
145.590726
146.270843
146.942486
147.605718
148.260674
148.907425
149.546109
150.176794
150.799612
151.414626
152.021959
152.621696
153.213951
153.798781
154.376315
154.946626
155.509812
156.065958
156.
 升级会员
升级会员 