三相六拍步进电动机.docx
《三相六拍步进电动机.docx》由会员分享,可在线阅读,更多相关《三相六拍步进电动机.docx(13页珍藏版)》请在冰豆网上搜索。
三相六拍步进电动机
第1章绪论
1.1课题介绍及研究意义
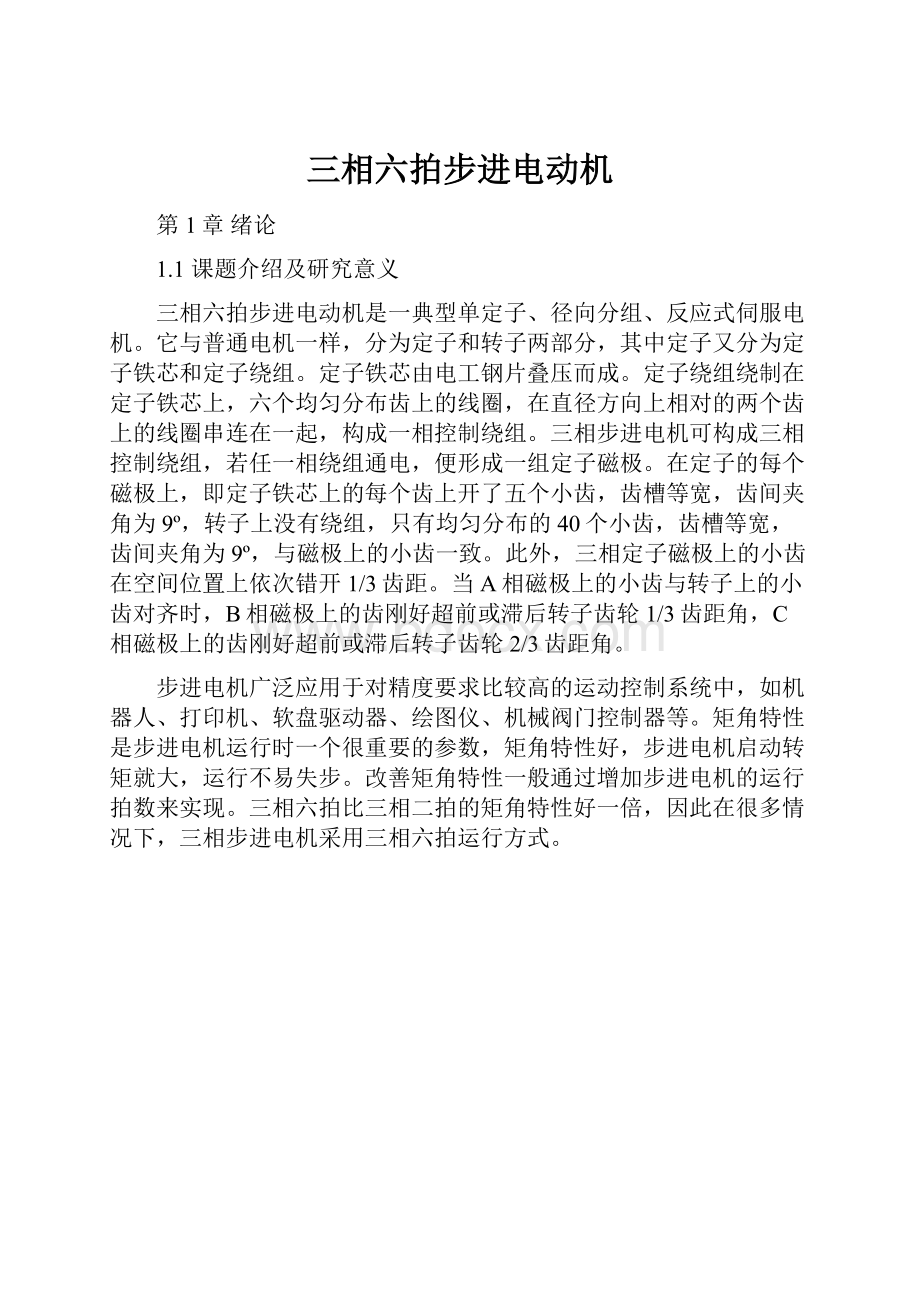
三相六拍步进电动机是一典型单定子、径向分组、反应式伺服电机。
它与普通电机一样,分为定子和转子两部分,其中定子又分为定子铁芯和定子绕组。
定子铁芯由电工钢片叠压而成。
定子绕组绕制在定子铁芯上,六个均匀分布齿上的线圈,在直径方向上相对的两个齿上的线圈串连在一起,构成一相控制绕组。
三相步进电机可构成三相控制绕组,若任一相绕组通电,便形成一组定子磁极。
在定子的每个磁极上,即定子铁芯上的每个齿上开了五个小齿,齿槽等宽,齿间夹角为9º,转子上没有绕组,只有均匀分布的40个小齿,齿槽等宽,齿间夹角为9º,与磁极上的小齿一致。
此外,三相定子磁极上的小齿在空间位置上依次错开1/3齿距。
当A相磁极上的小齿与转子上的小齿对齐时,B相磁极上的齿刚好超前或滞后转子齿轮1/3齿距角,C相磁极上的齿刚好超前或滞后转子齿轮2/3齿距角。
步进电机广泛应用于对精度要求比较高的运动控制系统中,如机器人、打印机、软盘驱动器、绘图仪、机械阀门控制器等。
矩角特性是步进电机运行时一个很重要的参数,矩角特性好,步进电机启动转矩就大,运行不易失步。
改善矩角特性一般通过增加步进电机的运行拍数来实现。
三相六拍比三相二拍的矩角特性好一倍,因此在很多情况下,三相步进电机采用三相六拍运行方式。
图1.1单定子径向分相反应式伺服步进电机结构原理图
1.2现行研究存在的问题及解决办法
在进行程序设计时,首先应明确对象的具体控制要求。
由于CPU对程序的串行扫描工作方式,会造成输入输出的滞后,而由扫描方式引起的滞后时间,最长可达两个扫描周期,程序越长,这种滞后越明显,则控制精度就越低。
因此,在实现控制要求的基础上,应使程序尽量简洁﹑紧凑。
另一方面,同一控制对象,根据生产的工艺流程不同,控制要求或控制时序会发生变化,此时,要求程序修改方便、简单,即要求程序有较好的柔性。
以SIMATIC移位指令为步进控制的主体进行程序设计,可较好的满足上述设计要求。
1.3本论文的目的及工作内容
用PLC控制三相六拍步进电机实现如下操作,其控制要求如下:
1.三相步进电动机有三个绕组:
A、B、C,
正转通电顺序为:
A→AB→B→BC→C→CA→A
反转通电顺序为:
A→CA→C→BC→B→AB→A
2.要求能实现正、反转控制,而且正、反转切换无须经过停车步骤。
3.具有两种转速:
1号开关合上,则转过一个步距角需0.5秒。
2号开关合上,则转过一个步距角需0.05秒。
4.按题意要求,画出PLC端子接线图、控制梯形图。
5.完成PLC端子接线工作,并利用编程器输入梯形图控制程序,完成调试
第2章系统方案设计(论证)
2.1方案原理分析
2.1.1功能要求
对三相六拍步进电机的控制,主要分为两个方面:
三相绕组的接通与断开顺序控制。
即:
正转顺序:
A-AB-B-BC-C-CA-A:
反转顺序:
A-AC-C-CB-B-BA-A以及每个步距角的行进速度。
围绕这两个主要方面,可提出具体的控制要求如下:
(1)可正转起动或反转起动;
(2)运行过程中,正反转可随时不停机切换;
(3)步进两种速度可分为高速(0.05S),低速(0.5S)两档,并可随时手控变速;
(4)停止时,应对移位寄存器清零,使每次起动均从A相开始。
2.1.2性能要求
在实现控制要求的基础上,应使程序尽量简洁﹑紧凑。
另一方面,同一控制对象,根据生产的工艺流程不同,控制要求或控制时序会发生变化,此时,要求程序修改方便、简单,即要求程序有较好的柔性。
2.2可行性研究
2.2.1要解决的问题的可行性分析及复杂性分析
其中,原低速开关I1.0变为步进基速赋值开关(Network1);原中速开关I1.1变为减速开关,每次I1.1从“0”-“1”,步进速度减慢0.01S(Network2);原高速开关I1.2变为加速开关,每次I1.2从“0”-“1”,经减法指令使转过每步距角所需时间减少0.01S(Network3),每次加速或减速的幅度可按需要任意修改设定。
而如果用其他方法编程,比如以定时器,比较指令等编程,则每一次变化速度,所有的定时器和比时段都需做出相应的调整,为程序修改带来不便。
第3章控制系统设计
3.1详述控制系统的实现方法
控制程序图及软件模块
由于上述具体控制要求,可作出步进电机在运行时的程序框图,如图1所示。
以工作框图为基本依据,结合考虑控制的具体要求,首先可将梯形图程序分为4哥模块进行编程,即模块1:
步进速度选择;模块2:
起动、停止和清零;模块3:
移位控制功能模块;模块4:
A、B、C三相绕组对象控制。
然后,将各模块进行连接,最后经过调试、完善、实现控制要求。
输入与输出编址
控制步进电机的个输入开关及控制A、B、C三相绕组工作的输出端在PLC中的I/O编址如表1所示
表1输入输出编址
输入端
输出端
I0.0
步进电机正转起动按钮
Q0.0
控制A相绕组
I0.1
步进电机反转起动按钮
Q0.1
控制B相绕组
I0.2
停止和清零按钮
Q0.2
控制C相绕组
I1.0
低速开关
(1)
I1.1
高速开关
(2)
采用移位指令进行步进控制。
首先指定移位寄存器MBO,按照三相六拍的步进顺序,移位寄存器的初值见表2。
表2移位寄存器初值1
M0.5M0.4M0.3M0.2M0.1M0.0
100000
每右移1位,电机前进一个布局角(一拍),完成六拍后重新赋初值
其中M0.6和M0.7始终为“0”。
据此,可作出移位寄存器输出状态及步进电机正反转绕组的状态真值表,如表所示。
从而得出三相绕组的控制逻辑关系式:
正转时
A相Q0.0=M0.5+M0.4+M0.0
B相Q0.1=M0.4+M0.3+M0.2
C相Q0.2=M0.2+M0.1+M0.0
反转时
A相Q0.0=M0.5+M0.4+M0.0
B相Q0.1=M0.2+M0.1+M0.0
C相Q0.2=M0.4+M0.3+M0.2
移位寄存器输出状态及步进电机绕组状态真值表
移位寄存器MBO正转反转
M0.5
M0.4
M0.3
M0.2
M0.1
M0.0
A
B
C
A
B
C
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
1
0
0
1
0
0
0
1
0
0
0
0
1
1
0
1
0
1
0
0
1
0
0
0
0
1
0
1
0
1
0
0
0
1
0
0
0
1
1
0
1
1
0
0
0
0
1
0
0
0
1
0
1
0
三相六拍步进电机控制语句表
3.2梯形图程序设计
三、步进电动机
(一)步进电动机的工作原理
步进电动机又称电脉冲马达,它实质上也是一种数模转换装置,被广泛应用于开环控制的伺服系统中。
转动方向:
如果按A—B—C—A—…连续向各相绕组供电,则步进电动机将按逆时针方向连续旋转。
反之如果按A—C—B—A—…供电,步进电动机将按顺时针方向旋转。
如果改变绕组的通断电频率,则可改变步进电动机的转速。
步距角:
每通断电一次,步进电动机转过30°,称为一个步距角。
(二)步进电动机的通电方式和步距角
如果步进电动机绕组的每一次通断电操作称为一拍,每拍中只有一相绕组通电,其余断电,这种通电方式称为单相通电方式。
三相步进电动机的A、B、C三相轮流通电一次共需三拍,称为一个通电循环,相应的通电方式又称为三相单三拍通电方式。
如果步进电动机通电循环的每拍中都有两相绕组通电,这种通电方式称为双相通电方式。
三相步进电动机采用双相通电方式时,每个通电循环也需三拍,因而又称为三相双三拍通电方式,即AB—BC—CA—AB—…。
如果步进电动机通电循环的各拍中交替出现单、双相通电状态,这种通电方式称为单双相轮流通电方式。
三相步进电动机采用单双相轮流通电方式时,每个通电循环中共有六拍,因而又称为三相六拍通电方式,即A—AB—B—BC—C—CA—A—…。
一般情况下,m相步进电动机可采用单相通电、双相通电或单双相轮流通电方式工作,对应的通电方式可分别称为m相单m拍、m相双m拍或m相2m拍通电方式。
步进电动机的矩频特性:
步进电动机输出转矩与输入脉冲频率的关系。
所谓步距角,是指步进电动机每一拍转过的角度。
一个m相步进电动机,如其转子上有z个齿,则其步距角α可通过下式计算:
式中,k是通电方式系数,
(1)当采用单相或双相通电方式时,k=1,
(2)当采用单双相轮流通电方式时,k=2。
 升级会员
升级会员 