电机选型计算和涡轮蜗杆传动选型计算.docx
《电机选型计算和涡轮蜗杆传动选型计算.docx》由会员分享,可在线阅读,更多相关《电机选型计算和涡轮蜗杆传动选型计算.docx(11页珍藏版)》请在冰豆网上搜索。
电机选型计算和涡轮蜗杆传动选型计算
电机选型计算和涡轮蜗杆传动选型计算
主要性能参数要求:
履带底盘总重:
40kg
2现取履带底盘平地行驶最大速度:
1m/s,加速度:
0.2/ms
2爬坡最大速度:
0.5m/s,加速度:
0.2/ms
驱动轮直径:
200mm;
o;爬坡角度:
35
履带底盘主履带驱动电机的选择
1、基于平地最大速度的驱动电机功率计算
在城市道路上行驶时,履带底盘受力较简单。
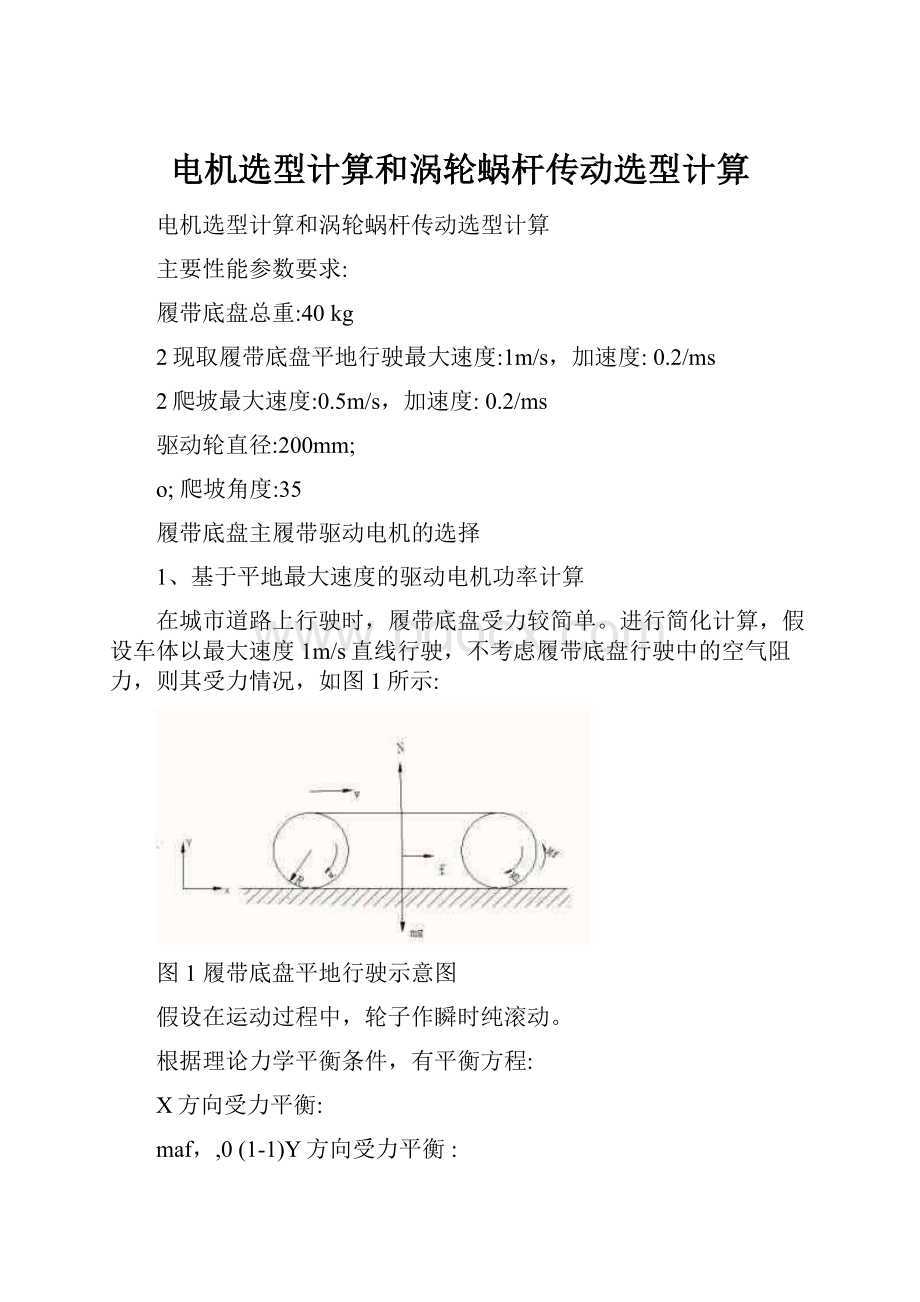
进行简化计算,假设车体以最大速度1m/s直线行驶,不考虑履带底盘行驶中的空气阻力,则其受力情况,如图1所示:
图1履带底盘平地行驶示意图
假设在运动过程中,轮子作瞬时纯滚动。
根据理论力学平衡条件,有平衡方程:
X方向受力平衡:
maf,,0(1-1)Y方向受力平衡:
mgN,,0(1-2)
以O点为对象力矩平衡:
fRMM,,,0(1-3)lf
滚动摩阻力矩:
MN,,(1-4)f
式中:
m——车体总重量(kg);
2——车体运行加速度();ams/
——地面对履带底盘的摩擦阻力(N);f
N——地面对履带底盘的支撑力(N);
R——驱动轮半径(m);
M——作用于驱动轮的驱动力矩(Nm);l
M——驱动轮滚动摩阻力矩(Nm);f
δ——地面履带滚动摩阻系数,δ=0.007。
2ams,0.2/假设车体在5秒内达到最大速度1m/s,则加速度:
联立上述方程:
MMfR,,==3.544Nm0.007,40,9.8,40,0.2,0.1lf
同时,根据公式:
,R,(1-5)
rads/代入v=1m/s,R=0.1m的值,可求得主动轮角速度为=10。
vmax又根据要求的行驶最大速度=1m/s,
v,60maxn,(1-6)max,D
由公式1-6初步确定电机经过减速后的最大输出转速:
160,
==95.54r/minnmax3.140.2,
综上,电机经过减速后的最大输出转速为95.54rpm,每侧电机经减速器减速后在最大行驶速度情况下需要提供的极限扭矩为1.722Nm,且要同时满足速度要求。
2、基于爬坡最大坡度的驱动电机功率计算
相对于普通行驶过程,爬坡能力对于移动履带底盘的驱动能力是一个重要的衡量指标,所以在进行驱动系统设计的时候,爬坡指标的计算也应作为选择电机的必须依据。
假设履带底盘在角度为的斜坡上匀速直线行驶,不考虑履带底盘小车行驶中的空气阻力,并且假设车体左右驱动完全对称,将整个车体作为研究对象,分析履带底盘的受力情况,如图2所示:
图2履带底盘爬坡受力示意图
假设在运动过程中,车体以匀速速度行驶,轮子作瞬时纯滚动。
图中各参数意义与平地受力时相同。
根据理论力学平衡条件公式,可列平衡方程如下:
X方向静力平衡:
fmg,sin,(1-7)Y方向静力平衡:
Nmg,cos,(1-8)以点O为对象力矩平衡:
MMfR,,(1-9)lf
滚动摩阻力矩:
(1-10)MN,,f
式中:
m——车体总重量(kg);
2——车体运行加速度();ams/
——地面对履带底盘的摩擦阻力(N);f
——地面对履带底盘的支撑力(N);N
α——斜坡的坡度;
R——驱动轮半径(m);
M——爬坡时作用于驱动轮的驱动力矩(Nm);l2
M——爬坡时驱动轮滚动摩阻力矩(Nm);f2
——地面履带滚动摩阻系数。
取=35度,联立式可以解得:
ooMMfR,,0.007,40,9.8,cos35,40,9.8,sin35,0.1==24.73Nmlf
每侧电机经减速后在最大坡度情况下需要提供的极限扭矩是12.37Nm。
与平
地最大速度行驶时电机所需扭矩相比较,可得在爬坡时要求电机输出扭矩较大。
同时,平地行走时,要求电机输出转速较高。
综上,根据平地最大行进速度以及
爬坡时所需电机输出扭矩进行电机选择。
vmax故根据爬坡时的行驶最大速度=0.5m/s,初步确定电机经过减速后的最大
输出转速:
0.560,v,60maxn,==47.77R/minmax3.140.2,,D
初步确定单个电机经减速箱后的功率P:
PKnM,(1-11)maxl30
式中K为安全系数,此时取2,将K、n、M带入,得到单侧电机功率:
l
2,3.14,47.77,12.37=123.66WP,
30
则所需电机的输出功率为:
Pout,(1-12)Pin,
其中为输出总效率,此处包括电机的效率、减速箱的传动效率、履带的牵引效率以及履带的传动效率,以上各量的值分别取为0.87,0.80,0.92,0.95
则有值计算如下:
(1-13),,,,,,1234
P将参数P,值代入到式中,可得单侧电机功率如下=202W,in
电机的选择以及电机与减速箱的匹配选择在重量上是一个相互矛盾的过程,在相同输出功率的情况下,若电机功率比较小,则要求减速箱减速比越大,减速箱随着减速比的增大重量也会增加而电机随着额定的输出功率增大,其重量也会增加。
综合考虑电机和减速器之间的关系,速比越大则要求电机输出扭矩越小,从而电机的重量就越轻。
在权衡二者利弊的基础上,根据所需的驱动力矩、其它结构以及运动性能的要求,驱动电机选择直流无刷电机86BLF系列,型号为86BLF-003,电机外形如图3所示,电机参数如表1所示。
图3直流无刷电机86BLF-003
表1直流无刷电机86BLF-003参数
型号电压V额定转额定转速额定电额定功质量机身长
rpmkgmm矩Nm流A率W
86BLF-003480.730006.62201.7567
3、涡轮蜗杆传动:
蜗轮蜗杆的选型
蜗杆传动在这个系统中起着关键性的作用,常用普通圆柱蜗杆传
)。
动的种类有阿基米德圆柱蜗杆(ZA型),渐开线圆柱蜗杆(ZI型
1.渐开线圆柱蜗杆(ZI型):
端面齿廓为渐开线。
这种蜗杆可以磨削,加工精度容易保证,传动效率高。
一般用于蜗杆头数较多((3头以上),转速较高和要求较精密的传动,如滚齿机、磨齿机上的精密蜗杆副等。
2.阿基米德圆柱蜗杆(ZA型):
车制。
这种蜗杆加工方便,应用广泛,但导程角大时加大困难,齿面磨损较快。
因此,一般用于头数较
0,,20少,载荷较小、低速或不太重要的传动。
轴向压力角a
通过对二者的特征进行比较,可见多功能移动履带底盘应该选择阿基米德圆柱蜗杆,即ZA型蜗杆。
涡轮蜗杆传动,一般都是以蜗杆为主动端,涡轮为从动端,并实现很大的减速比。
几乎没有以涡轮为主动端的应用。
涡轮蜗杆传动中的自锁,一般是指在涡轮上施加转矩,无法使机构转动的现象(你也可以认为此时涡轮是主动轮)。
涡轮蜗杆传动中发生自锁的条件是蜗杆的展开螺距角小于涡轮蜗杆接触的摩擦角。
即β<Φ,β为蜗杆的展开螺距角,Φ为摩擦角;tgΦ=μ,μ为摩擦系数。
普通圆柱蜗杆传动的中心距尾数应取为0或5mm。
对于要求具
o'有自锁性能的蜗杆传动,导程角的选取范围为:
,且蜗杆头数,,317z=1。
蜗轮蜗杆副自锁验证:
依靠具有自锁能力的蜗轮蜗杆副实现自锁功能。
蜗轮蜗杆副自锁条件:
蜗杆螺旋角小于折合摩擦角;,,
要可靠自锁必须比至少1度。
,
Z,,,1,,arctan,arctanfcos(),,,2q,,
:
蜗杆头数;Z1
d1q:
蜗杆直径系数,,;qms
d:
蜗杆分度圆直径;1
m:
蜗杆模数;
f:
摩擦系数,取f=0.1;
:
蜗杆螺纹剖面角。
设计过程:
蜗杆传动的主要失效形式是胶合和磨损。
闭式蜗杆传动以胶合为主要失效形式,开式蜗杆传动主要是齿面磨损。
在开式传动中应以保证齿根弯曲疲劳强度作为主要设计准则,在闭式传动中应按涡轮齿面接触疲劳强度进行设计,而后按涡轮齿根弯曲疲劳强度进行校核。
蜗杆材料的强度通常比蜗轮材料高,且蜗杆齿为连续的螺旋齿,故蜗
杆副的失效一般出现在蜗轮上。
通常只对蜗轮进行承载能力计算。
蜗杆通常为细长轴,过大的弯曲变形将导致啮合区接触不良,因此,当蜗杆轴的支撑跨距较大时,应校核其刚度是否足够。
根据蜗杆传动的失效特点,蜗杆副材料不但应具有足够的强度,而且还应具有良好的减磨性和抗胶合性能。
实践证明,较理想的蜗杆副材料是磨削淬硬的钢制蜗杆匹配青铜蜗轮。
蜗杆常用材料为碳钢或合金钢。
常用蜗轮材料有铸造锡青铜、铸造铝铁青铜及灰铸铁等等。
1.选择蜗杆传动类型:
根据GB/T10085--1988的推荐,选择闭式ZA型蜗杆传动2.选择材料:
考虑到蜗杆传动效率不是很大,速度中等,故蜗杆用45钢表面淬火,硬度为45~55HRC。
齿面粗糙度Ra=1.6~0.8um。
涡轮的轮芯用灰铸铁HT150,齿圈用铸锡磷青铜ZCuSn10P1,金属模铸造。
3.按齿面接触疲劳强度进行设计:
2ZZ,,Ep3,,a,KT2,,,,,,H,
作用在涡轮上的转矩=22.56NmT2
载荷系数K,KKK=1.15*1*1.05=1.21A,v
弹性影响系数Z=160Mpa(因选用是钢蜗杆和铸锡磷青铜涡轮相配)E
Z接触系数=3(先假定蜗杆分度圆直径d1和传动中心距a的比值)p
'确定许用接触应力=268*0.97=259.96MPa,,,,,,,KHHHN
',,涡轮的基本许用应力查表得到,H
71.3,10应力循环齿数=60*1*17.95*12000=N,60jnL2h
7108,寿命系数K=0.977HN1.3,10
计算中心距a>47.62mm
查表得:
取中心距a=63mm,模数m=1.6mm,分度圆直径d1=28mm
'Z,Z这时d1/a=0.44,,则计算结果可用。
pp
4.蜗杆和涡轮的主要参数与几何尺寸
(1)蜗杆:
轴向齿距=5.024mm,直径系数q=17.5,头数Z1=1P,m,a
蜗杆分度圆直径=28mmd1
**齿顶圆直径=31.2mmd,d,2hmh,1a11aa
***齿根圆直径=24.16mmc,0.2d,d,2(h,c)mfa11
齿高=3.52mmh,h,h1a1f1
zm1渐开线蜗杆基圆直径=4.34mm,db1tan,b
渐开线蜗杆基圆导程角cos,,cos,cos,bn
蜗杆齿宽=55mmb1
'd,d,2xm蜗杆节圆直径=28.4mm112
Z0'''1,,arctan,31614分度圆导程角
q
1蜗杆轴向齿厚=2.512mm,S,ma2
蜗杆法向齿厚=2.51mmS,Scos,na
(2)蜗轮:
涡轮齿数Z2=61变位系数x2=+0.125
蜗轮分度圆直径=97.6mmd,mz22
*h,m(h,x)蜗轮齿顶高=1.8mm20a2a2
**蜗轮齿根高=1.72mmh,m(h,x,c)fa22
h,h,h蜗轮齿高=3.52mm2a2f2
*蜗轮喉圆直径=100.8mmd,d,2hma22a
**蜗轮齿根圆直径=93.76mmd,d,2(h,c)mfa22
蜗轮顶圆直径=104mmd,d,2me2a2
蜗轮齿宽=23.4mmb,0.75d2a1
d1蜗轮齿顶圆弧半径=12.4mmR,,ma22
d*a1蜗轮齿根圆弧半径,,=15.92mmRcmf22
蜗轮分度圆齿厚=2.66mmS,(0.5,,2xtan,)m22n
'蜗轮节圆直径=97.6mmd,d22
1蜗轮咽喉母圆半径=12.6mmr,a,dg2a22
5.校核齿根弯曲疲劳强度:
KT1.532,,,,YY,,FFa2,Fddm12
z2,当量齿数z=61.31v23cos,
根据变位系数x2和当量齿数,查表得:
齿形系数=2.25YFa2
螺旋角系数1=0.9766Y,,,0140
'许用弯曲应力=42.11MPa,,,,,K,,FFFN
',,根据蜗轮材料得到蜗轮的基本许用弯曲应力=56MPa,F
6109K,寿命系数=0.75FN71.3,10
,,=24.36MPa<,,弯曲强度满足。
FF
6.验算效率:
tan,,(0.95~0.96)
tan(,,,)v
,arctanfvvfv,与相对滑动速度有关。
vs
dn11=0.79m/sv,s60,1000,cos,
0,,2.805查表得:
(自锁蜗杆传动的效率为0.3),,0.52v
7.热平衡核算:
摩擦损耗的热流量:
P为蜗杆传递的功率,,1000P(1,,)1
以自然冷却的方式向外扩散的热流量:
,,S(t,t)2d0a
箱体表面的传热系数;S箱体散热面积;,d
0油的工作温度,一般限制在60~70tC0
0周围空气的温度,一般为20tCa
热平衡条件:
,,12
求既定条件下的油温t,或保持正常工作温度所需要的散热面0积S。
 升级会员
升级会员 