GYK装置的操作和使用.docx
《GYK装置的操作和使用.docx》由会员分享,可在线阅读,更多相关《GYK装置的操作和使用.docx(38页珍藏版)》请在冰豆网上搜索。
GYK装置的操作和使用
第一章GYK基本构成和原理
一、基本构成
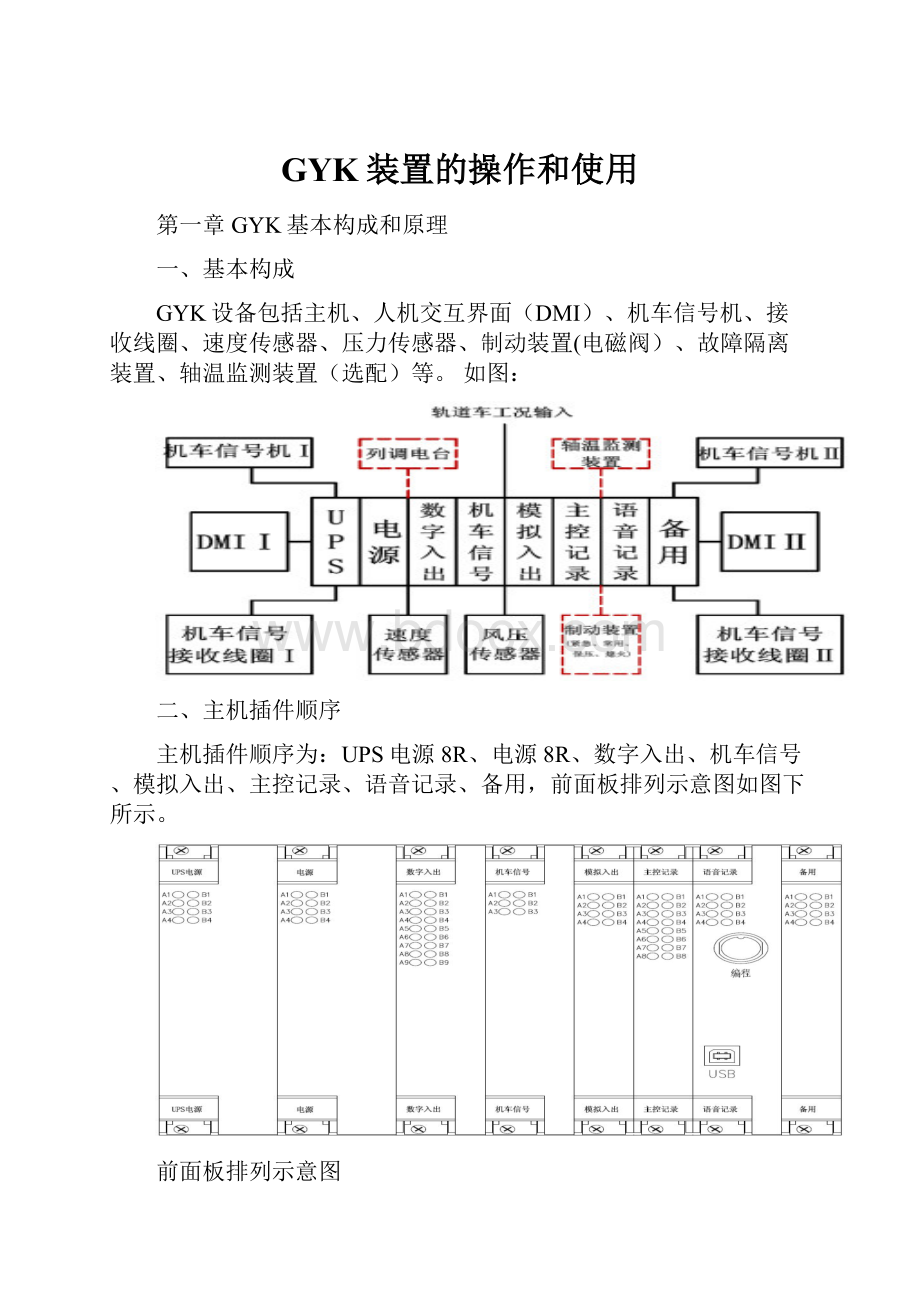
GYK设备包括主机、人机交互界面(DMI)、机车信号机、接收线圈、速度传感器、压力传感器、制动装置(电磁阀)、故障隔离装置、轴温监测装置(选配)等。
如图:
二、主机插件顺序
主机插件顺序为:
UPS电源8R、电源8R、数字入出、机车信号、模拟入出、主控记录、语音记录、备用,前面板排列示意图如图下所示。
前面板排列示意图
三、主要功能
UPS电源插件用于轨道车发动机启动时保证GYK正常工作;电源插件提供主机及外部传感器的电源;数字入出插件用于数字量输入和输出;机车信号插件实现轨道电路信息接收;模拟入出插件用于模拟量输入输出;主控记录插件实现轨道车的运行控制和数据记录功能;语音记录插件可对车机联控话音或GYK各种提示语音记录;备用插件作为功能扩展预留。
第二章DMI显示及按键说明
一、DMI显示内容
界面屏幕显示如图所示:
二、主窗口
•屏幕中间的窗口为主窗口,显示范围为4公里。
靠左处的竖直线将窗口分为两部分,左侧显示轨道车位置后方1km范围的实际运行速度曲线,右侧显示轨道车位置前方3km以内的模式控制曲线。
具体说明如下:
•限制速度曲线:
红色曲线显示当前区段的限速曲线(常用制动模式曲线)和前方3km以内的限速情况,并在曲线上方用数字标注目标速度。
•实际速度曲线:
绿色曲线显示轨道车当前运行速度和刚走行1km范围的速度曲线情况。
•站中心及站名:
以坐标方式(垂直蓝线)显示前方3km以内所有站的站中心位置,并用汉字标注对应车站的名称。
•轨道车位置:
主窗口左侧1/4处有一条垂直分隔线(黄色线),显示一个轨道车图标,表示当前轨道车位置。
•道岔:
显示进、出站的道岔位置。
•前方站:
屏幕的右上方以汉字显示前方站的名称。
•公里标:
屏幕的下方有一条横白线,显示公里标的变化及走行情况。
•控制模式:
屏幕的左上方以字符图标的方式显示控制模式。
•主屏幕下方显示提示信息内容:
•支线显示:
允许输入支线操作时,自动显示本分区所有支线。
•报警信息。
•其它运行信息提示。
三、按键功能说明
按键为带背光按键,在光线变暗时,按键字体可自动透光。
按键共24个,0-9及小数点共11个键为复合键,复合键在参数修改状态作数字键用,在其它状态可作功能键用,其它为单功能键,按键布置如图所示。
第三章DMI操作界面
DMI操作界面主要分:
模式选择界面、查询操作界面、参数设定界面。
在DMI操作按键上分别按压【模式】、【查询】、【设定】键,即可进行模式转换、参数设定和查询操作。
一、参数设定界面
停车时,按【设定】键进入“参数设定”界面,即可输入各项参数。
•选择“1.临时限速”,按【确认】键进入“临时慢行限速设置”界面。
•选择“2.里程断链”,按【确认】键进入“里程断链数据制作”界面。
•选择“3.信号限速”,按【确认】键进入“灯型限速查看与设置”界面。
•选择“4.管理”,按【确认】键进入“系统参数管理”界面。
•选择“5.系统”,按【确认】键:
进入“机车参数查看与设置”界面。
•选择“6.时间”,按【确认】键:
进入“时间设置”界面。
二、模式选择界面
停车时,按【模式】键进入“轨道车模式选择”界面,模式选择界面如图所示。
选择“1.正常监控模式”按【确认】键:
进入正常监控模式。
选择“2.目视行车模式”按【确认】键:
进入目视行车模式。
选择“3.调车模式”按【确认】键:
进入“调车作业状态选择”界面。
选择“4.区间作业模式”按【确认】键:
进入“区间作业状态选择”界面。
选择“5.非正常行车模式”按【确认】键:
进入“非正常行确认”界面。
按【模式】键+相应数字键可快捷进入。
DMI面板设置【正常】【调车】【区间作业】快捷键,按压这些键直接进入相应的模式选择界面。
在主界面下按压【↑】键2s直接进入“非正常行车状态选择”界面。
三、查询操作界面
按【查询】键进入“查询选择”界面,查询操作界面如图所示。
第四章模式转换设定及操作说明
模式的转换方法是按压【模式】键,显示器弹出如下图所示“轨道车模式选择”界面。
第一节正常监控模式
本模式用于轨道车正常运行控制。
GYK根据机车信号信息、速度信息,以进入闭塞分区后700m处为目标点,计算产生控制曲线。
1、进入/退出操作
•停车状态下按压DMI面板【正常】键进入正常监控模式。
•或停车状态时按压【模式】键,DMI弹出“轨道车模式选择”界面,将光标移动到“正常监控模式”,按压【确认】键,或者按压快捷数字键选定“正常监控模式”按压【确认】键,进入正常监控模式,自动调出基本数据。
•或在参数设定界面设定好监控交路基本数据,按压【确认】键后进入正常监控模式。
选择另外一种控制模式则退出“正常监控模式”。
2、模式限速值确定
•模式限速值按以下要求确定:
•1、模式限速值取编组限速、线路固定限速、机车信号限速和临时限速的最低值。
•2、正常监控模式采用速度分级控制方式。
3、对机车信号的控制
当机车信号变为减速信号时,以进入闭塞分区后700m为目标距离,按TSM区控制轨道车减速运行,显示剩余距离。
当机车信号变为允许信号时,按变灯后的限速曲线控制轨道车运行如图所示。
对各种机车信号控制模式如下:
机车信号控制模式
①、绿灯、绿黄灯、黄2灯闪控制
机车信号变为绿灯、绿黄灯、黄2灯闪时,控制轨道车不超过绿灯、绿黄灯黄2灯闪的速度运行,距离窗口显示“离前方站中心距离”。
②、黄灯、黄2灯、双黄灯、双黄灯闪控制
机车信号变为黄灯、黄2灯、双黄灯、双黄灯闪时,控制轨道车700m后降为黄灯、黄2灯、双黄灯、双黄灯闪的允许速度,距离窗口显示距离由700m开始递减,递减为0后显示“离前方站中心距离”。
③、红黄灯闪控制
机车信号变为红黄灯闪时,控制轨道车运行700m后降为红黄灯闪的允许速度,距离窗口显示距离由700m开始递减,递减为0后显示“离前方站中心距离。
④、红黄灯控制
机车信号变为红黄灯时,控制轨道车运行500m后停车。
距离窗口显示距离由500m开始递减,递减为0后显示“-----”。
对闭塞分区间隔小于500m的信号机变为红灯,机车信号显示为红黄灯,控制轨道车在本架信号机前停车,并留有安全距离。
在停车模式,机车信号变为红黄灯时,原停车曲线不变。
停车后,允许司机按压【解锁】键解锁,GYK进入正常监控(目视行车)状态。
机车信号变化时,GYK根据允许信号自动退出(目视行车)状态,恢复正常监控模式。
⑤、红灯控制
当机车信号变为红灯时(或HU码转无码的红灯),按信号关闭监控轨道车运行,GYK输出紧急制动指令。
停车后提供解锁条件,允许司机按压【解锁】键解锁,司机按规定操作后,GYK进入正常监控模式(目视行车)状态。
当机车信号变为允许信号时,GYK按正常监控模式控制。
⑥、进站控制
当机车信号由双黄灯、双黄灯闪、交流计数黄灯变为白灯时,控制轨道车前方700m停车,DMI窗口左上角显示“侧线进站”。
速度低于20km/h时,提供解锁条件,允许司机按压【解锁】键解锁,司机按规定操作后,GYK按目视行车控制,如下图所示。
当机车信号变化时,GYK根据允许信号自动退出(目视行车)状态,恢复正常监控模式。
此控制方式也适用于侧线无码股道车站的通过。
GYK目视行车控制示意图
⑦、出站控制
当机车信号变为双黄灯、双黄灯闪、交流计数黄灯时,速度低于20km/h时,GYK提供确认条件:
允许司机按压【出站】键解锁,司机按规定操作后,DMI窗口左上角显示“侧线出站”,装置自动解除由双黄灯、双黄灯闪、交流计数黄灯变为白灯的停车控制,按道岔限速30km/h控制运行。
当机车信号变为允许信号时,GYK按正常监控模式控制。
半自动闭塞区间,过出站道岔后,GYK按白灯限速控制,遇区间线路限速,按线路限速控制。
出站控制示意图
4、机车信号变为白灯的控制
机车信号由绿灯、绿黄灯变为白灯,按前方信号机关闭监控轨道车运行,控制轨道车运行1400m后停车。
机车信号由黄灯、黄2、黄2灯闪变为白灯,控制轨道车运行700m后停车。
停车后提供解锁条件,允许司机按压【解锁】键解锁。
司机按规定操作后,GYK进入正常监控模式(目视行车)。
当机车信号变化时,GYK根据允许信号自动退出(目视行车),恢复正常监控模式。
5、机车信号信息异常控制
机车信号由允许信号变为灭灯、多灯时,按停车信号监控轨道车运行,控制轨道车在700m内停车。
机车信号由停车信号变为灭灯、多灯时,按原停车曲线控制。
6、信号突变控制
黄灯、双黄灯变为红黄灯,灯变化时100m内无绝缘节信号,按信号突变控制。
100m内有绝缘节信号,按停车信号控制。
绿灯、绿黄灯变为红黄灯,按信号突变控制。
信号突变控制:
GYK发出“信号突变”语音报警,司机确认地面信号机显示允许信号,在7s内按【警惕】键解除信号突变报警和紧急停车控制,按停车信号控制。
不按【警惕】键7s后GYK紧急制动。
停车后提供解锁条件,允许司机按压【解锁】键解锁,司机按规定操作后,GYK进入正常监控模式(目视行车)。
当机车信号变化时,GYK根据允许信号自动退出(目视行车),恢复正常监控模式。
7、临时限速区段控制
轨道车运行到临时限速区段,GYK监控轨道车以不超过临时限速值的速度通过限速区段。
①、临时限速输入
司机采用转储器或人工输入的方法输入临时限速揭示信息。
②、临时限速控制
在施工时段内,轨道车接近限速区段(临时限速比当前限速低时),距施工点1000m时语音提示“距离限速区段1公里,减速运行”,按TSM区控制。
轨道车通过临时限速区段的控制方式如图所示。
临时限速区段的控制方式图
临时慢行限速输入:
按【设定】键,进入“参数设定”窗口,将光标移到“1.临时限速”项,按压【确认】键,进入临时限速设置界面。
按压【↑】、【↓】将光标移动到要输入的选项进行输入,输入完成后,将光标移动到“插入”按压【确认】键,制作成功的慢行限速出现在慢行限速列表,手动输入临时限速界面如图所示。
临时慢行限速取消:
在“临时慢行限速设置”查询界面,在慢行限速列表选中需要取消的临时限速项,按压数字键【前进/1】键将其删除。
临时慢行限速查询:
按压【查询】键进入查询操作界面,选择“2.人工揭示”,按【确认】键进入进行核对。
临时慢行限速设置
8、无数据线路里程断链控制
①、线路里程断链信息输入
司机采用专用转储器或人工输入的方法输入线路里程断链信息。
按【设定】键,进入“参数设定”窗口,将光标移到“2.里程断链”项,按压【确认】键,进入里程断链输入界面,数据编辑完整后,按压【设定】将编辑好的数据插入到列表中。
手动输入里程断链界面如图所示。
②、线路里程断链突变修正
遇线路里程断链突变点GYK自动修正公里标并记录。
③、里程断链取消
在“手动输入揭示--里程断链”界面,选中需要取消的里程断链项,按压【上行/下行】删除该条数据。
里程断链取消界面
9、溜逸控制
①、空档溜逸:
当作业车未加载(即工况为空挡)由停车状态移动时,速度≥3Km/h或车辆移动距离≥10m时,GYK语言报警提示“注意空档防溜”,10s内按压【警惕】键可解锁,否则输出紧急制动。
②、相位溜逸:
当作业车由停车状态移动,若作业车速度传感器两通道相位与作业车运行方向相反,作业车运行速度≥3Km/h或车辆移动距离≥10m时,GYK语言报警提示“注意相位防溜”,10s内按压【警惕】键可解锁,否则输出紧急制动。
③、管压溜逸:
轨道车速度从≥3km/h降为0,停车后的列车管压值与运行时最高管压相比较,管压下降<80kPa(一次减压不足80kPa),产生防溜报警语音提示“注意管压防溜”,在5s内追加减压≥80kPa,或者按压【警惕】键可解除语音报警,否则输出紧急制动。
紧急制动输出只能在停车后缓解,司机根据“允许缓解”提示,按压【缓解】键后,紧急制动缓解,语音提示:
“缓解成功”。
10、警醒功能
GYK在正常监控模式,速度大于20km/h时,启动“周期警惕功能”,并开始计时,计时达到120秒,启动“警醒控制”。
1、操作应答
在报警时间内,司机按压手动按钮或踩踏应答踏板,GYK停止报警,重置报警计时器;持续按压手动按钮或踩踏应答踏板,不重置报警计时器。
应答操作仅对作业车操纵端(有权端)有效,非操纵端(无权端)无效。
2、发出制动指令
在报警时间内未得到应答信息,GYK发出紧急制动指令。
制动指令发出后须在停车后解除。
3、在报警时间内,有如下情况之一时停止报警并重置报警计时器:
1)工况手柄位变化。
2)列车管压力6s内变化超过50kPa。
3)GYK有按键输入。
第二节目视行车模式
一、用途
1、出入库作业用目视行车模式控车。
2、正常监控遇停车信号(红黄灯、红灯、白灯)或信号突变,停车后,根据需要,司机按【解锁】键转入正常监控模式(目视行车)。
3、区间作业遇封闭的停车点,停车后,根据需要,司机按【解锁】键转入区间作业模式(目视行车)。
4、机车信号故障时,停车后,根据需要,通过司机操作,转入目视行车模式。
二、进入/退出
1、GYK开机时,自动进入该模式。
2、在停车状态下,按压【模式】键,DMI弹出“轨道车模式选择”界面,将光标移动到“目视行车模式”,按压【确认】键,或者直接按压快捷数字键,进入目视行车模式。
DMI窗口左上角显示“目视行车”,选择进入另外一种控制模式则退出该模式。
3、遇停车信号或限速曲线为0,停车后或速度小于20km/h时,司机按规定进行人工解锁后,进入目视行车状态。
DMI窗口左上角显示“××模式(目视行车)”。
三、目视行车限速值的确定
1、GYK按20km/h限速曲线控制轨道车运行。
2、周期报警:
当运行100m或经过30s时,GYK发出报警音,按【警惕】键,距离及时间计数清0,继续走行100m或经过30s后再次报警。
3、如果司机在轨道车运行150m或40s以内不按【警惕】键,限速变为0km/h,输出紧急制动指令,停车后允许缓解,重新生成模式限速曲线。
4、在正常监控模式下(目视行车)状态,机车信号变化时,GYK根据允许信号自动退出正常监控(目视行车),恢复正常监控模式。
5、目视行车模式下,机车信号变化GYK仅有语音提示,但不控制。
6、防溜逸控制功能有效。
警醒功能无效。
第三节调车模式
调车模式是轨道车进行调车作业的固定限速模式,限速值按牵引40km/h、推进30km/h、连挂5km/h设置。
一、模式控制
1、GYK按模式限速曲线控制轨道车运行。
2、防溜逸控制功能有效,速度超过20km/h且时间超过120S时警醒功能有效。
3、机车信号变化时,GYK有语音提示,但不控制。
第四节区间作业模式
用于轨道车进入封锁区间进行作业的控车模式。
具有五种状态:
1.区间作业进入、2.区间作业返回、3.区间作业防碰、4.区间作业编组、5.5km/h连挂。
一、区间作业进入
区间作业进入用于轨道车进入封锁区间进行区间作业的控车模式。
停车状态下,按DMI面板【区间作业】键,DMI弹出“区间作业状态选择”窗口,选择“区间作业进入”。
或在停车状态下,按【模式】键,进入“模式选择”窗口,移动方向键使光标到对应的“区间作业模式”,按【确认】键,此时弹出“区间作业状态选择”窗口,选择“区间作业进入”。
在“区间作业进入状态”界面,依次输入“调度命令号”、“车次”、“作业起点”、“作业终点”、“封锁区间限速”、“作业区间限速”、“出站信号机公里标”,按【确认】键确定,此时屏幕左上方显示“区间作业(进入)”。
选择另外一种控制模式则退出该模式。
1、区间作业进入模式限速值的确定
模式限速值按以下要求确定:
取封锁区间限速、作业区间限速、编组限速、临时限速的最低值确定模式限速值。
2、区间作业进入模式控制
①、GYK监控轨道车按道岔限速出站,在出站信号机处按【开车】键后按模式限速控制。
②、运行至作业起点前1km处语音提示,“距离限速区段1公里,减速运行”,并以减速模式防止轨道车作业区间超速。
③、运行至作业终点前停车,留有安全距离100米。
④、停车后控制:
根据需要,轨道车继续前行作业时,可以按压【解锁】键,解除停车控制,GYK进入区间作业(目视行车)。
⑤、防溜逸控制功能、警醒功能有效。
⑥、机车信号变化时,GYK有语音提示,但不控制。
二、区间作业返回
用于轨道车区间作业完毕返回车站的控车模式。
停车状态下,按DMI面板【区间作业】键,DMI弹出“区间作业状态选择”窗口,选择“区间作业返回”。
或停车状态下,按【模式】键,进入“模式选择”窗口,移动方向键使光标到对应的“区间作业模式”,按【确认】键,此时弹出“区间作业状态选择”窗口,选择“区间作业返回”。
参数设定:
在“区间作业返回”窗口,司机输入“返回车次”、“当前公里标”、前方“进站(或反向进站)信号机公里标”、“封锁区间限速”,按【确认】键确定,此时屏幕左上角显示“区间作业(返回)”,选择另外一种控制模式则退出该模式。
作为补机的轨道车,若已进入区间作业返回状态,只要退出补机进入本务状态即可。
1、区间作业返回模式限速值的确定
模式限速值按以下要求确定:
取封锁区间限速、编组限速、临时限速的最低值确定模式限速值。
2、区间作业返回模式控制
①、按模式限速值控制运行。
②、运行至进站信号机或反向进站信号机前,GYK能接收到机车信号,GYK则按机车信号控制行车,进站后遇关闭信号以前方500米为目标产生制动曲线,停车后或速度小于20km/h提供解锁;如果接收不到机车信号,停车后或速度小于20km/h,按压【解锁】键,进入区间返回(目视)控制模式运行进站。
③、防溜逸控制功能、警醒功能有效。
④、机车信号变化时,GYK有语音提示,但不控制。
三、区间作业防碰
用于轨道车在设定的作业起点和终点公里标范围内的控车模式。
按DMI面板【区间作业】键,DMI弹出“区间作业状态选择”窗口,选择“区间作业防碰”。
或停车状态下,按【模式】键,进入“模式选择”窗口,移动方向键使光标到对应的“区间作业模式”,按【确认】键,此时弹出“区间作业状态选择”窗口,选择“区间作业防碰”。
参数设定:
在“区间作业防碰”窗口,依次输入“调度命令号”、“当前公里标”、“起点公里标”、“终点公里标”、“区间作业限速”,按【确认】键确定,此时屏幕左上方显示“区间作业(防碰)”。
取消区间作业防碰,则在“区间作业防碰”窗口中将“调度命令号”改为0即可。
1、防碰模式限速值的确定
按区间作业限速确定模式限速值。
2、防碰模式控制
①、按区间作业限制速度控制运行,在作业区间起点、终点前停车,留有安全距离100米。
②、到达起点或终点前,有语音提示。
③、停车后控制:
可以人工解除停车控制,按区间作业(目视行车)控制。
④、防溜逸控制功能有效。
警醒功能无效。
⑤、机车信号变化时,GYK有语音提示,但不控制。
四、区间作业编组
用于轨道车区间作业完毕,进行车辆编组的控车模式。
按DMI面板【区间作业】键,DMI弹出“区间作业状态选择”窗口,选择“区间作业编组”。
或停车状态下,按【模式】键,进入“模式选择”窗口,移动方向键使光标到对应的“区间作业模式”,按【确认】键,此时弹出“区间作业状态选择”窗口,选择“区间作业编组”。
参数设定:
在“区间作业编组”窗口,输入“当前公里标”、“连挂点公里标”,按【确认】键,进入区间作业编组状态,DMI窗口左上角显示“区间作业(编组)”。
选择另外一种控制模式则退出该模式。
1、编组模式限速值的确定
按20km/h确定模式限速值。
2、编组模式控制
①、按限速模式曲线控制运行,在连挂点前停车,留有安全距离100米。
②、到达终点前,有语音提示。
③、停车后控制:
可以人工解除停车控制,GYK进入区间作业(目视行车)。
④、防溜逸控制功能有效,警醒功能无效。
⑤、机车信号变化时,GYK有语音提示,但不控制。
五、5km/h连挂
用于轨道车进行车辆连挂的控车模式。
按DMI面板【区间作业】键,DMI弹出“区间作业状态选择”窗口,选择“5km/h连挂”或停车状态下,按【模式】键,进入“模式选择”窗口,移动方向键使光标到对应的“区间作业模式”,按【确认】键,此时弹出“区间作业状态选择”窗口,选择“5km/h连挂”。
按【确认】键,进入连挂状态,DMI窗口左上角显示“5km/h连挂”,选择另外一种控制模式则退出该模式。
1、模式限速值的确定
按5km/h确定模式限速值。
2、速度控制
①、按限速模式曲线控制轨道车运行。
②、防溜逸控制功能有效,警醒功能无效。
③、机车信号变化时,GYK有语音提示,但不控制。
六、补机状态
在停车状态下,按压【设定】键,出现“参数设定”窗口。
选择“补机”,按压【确认】键,进入补机状态。
GYK在补机状态时,DMI窗口左上角,在控制模式名称提示下方显示“补机状态”。
需要退出补机状态时,在停车状态下按压DMI面板【设定】键,出现“参数设定”窗口。
选择“本务”,按压【确认】键,即可退出补机状态。
补机状态控制:
补机状态下,GYK只记录,不控制。
第五节非正常行车模式
非正常监控模式下具有地面信号确认﹑路票行车、绿色许可证行车﹑引导进站四种非正常行车状态。
在停车状态时,按压【↑】键2s或按压【模式】键选择“非正常行车确认”按【确认】键进入“非正常行车确认”窗口,选择相应状态,按【确认】键,即可进入设定界面。
一、地面信号确认(无码股道发车)
1、使用时机:
①、当出站信号机开放,机车信号显示为白灯、红灯,速度为0发车。
GYK按停车信号控制时。
②、且机车信号上下行位置正确、机车信号感应器系统外观无破损。
2、操作方法:
在机班共同确认具备发车条件后,司机持续按压【↑】键2s,显示【非正常行车确认】窗口,选择【地面信号确认】选项,按压方向键将光标定位到“确定”,按压【确认】键,GYK解除停车控制,按道岔限速30km/h控制运行。
当信号变更为允许信号后按正常监控模式控制。
3、注意事项:
当机车信号与地面色灯显示不一致时,机班应按照机车信号故障的判断方法进行检查、处理,在确知作业车机车信号设备正常,属地面发码设备故障方可按上述方法操作。
必须防止因作业车机车信号故障而进入区间。
4、车站股道固定无码表:
由相关电务段提供给相关供电、工务段。
二、绿色许可证
1、使用时机:
《技规》第250条
①、出站信号机故障发出列车;
②、由未设出站信号机的线路上发车;
③、发车进路信号机发生故障时发出列车;
④、超长列车头部越过出站信号机发车;
⑤、超长列车头部越过发车进路信号机发车;
2、操作方法:
①、停车接书面的《绿色许可证》(《技规》附件二)。
②、机班共同确认、复诵许可证编号、车次、线别、站印、日期正确,确认车站发车信号后。
③、持续按压【↑】键2s,GYK显示“非正常行车确认”窗口,选择“绿色许可证”选项,输入调度命令号、绿色许可证编号,按压【解锁】+【确认】键,装置解除本架信号机的停车控制,按道岔限速30km/h运行。
当信号变更为允许信号后按正常监控模式控制,解除“绿色许可证”。
3、注意事项:
①、始发站使用绿色许可证行车时,应先进行
 升级会员
升级会员 