安川机器人同步传送带的操作手册.docx
《安川机器人同步传送带的操作手册.docx》由会员分享,可在线阅读,更多相关《安川机器人同步传送带的操作手册.docx(22页珍藏版)》请在冰豆网上搜索。
安川机器人同步传送带的操作手册
机器人同步传送带的操作手册
1.同步传送带基板单元JANCD-XCP02-2(XRC)/JANCD-NCP02(NX100)/JANCD-YCP02(DX100)的安装与设置
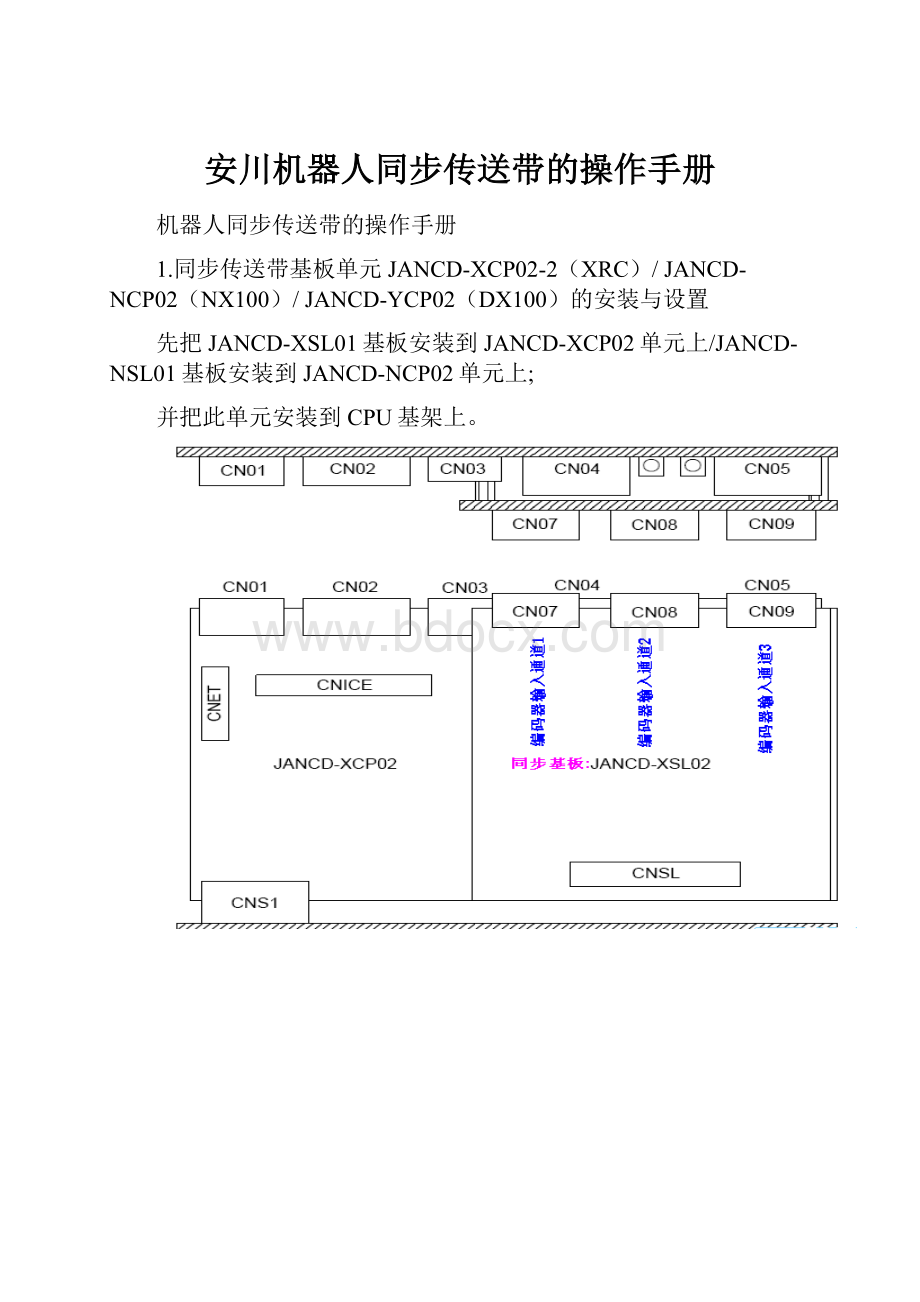
先把JANCD-XSL01基板安装到JANCD-XCP02单元上/JANCD-NSL01基板安装到JANCD-NCP02单元上;
并把此单元安装到CPU基架上。
DX100-ycp02
2.设定
2.机器人同步基板的配置与设置
.管理模式,机器人主菜单下[机器人]菜单画面下,选择[传送带文件],弹出以下设置参数画面。
其中:
①文件号:
传送带特性文件号码如下表所示
②使用状态(使用/不使用)
设定使用或者不使用传送带特性文件
③接口(CN1/CN2/CN3)
选择使用已经连接的编码器输入,使用这个接口来启动同步功能的原点输入开关启动机器人同步跟踪功能.
★信号XRC中CNPG07这个接口对应CN1,CNPG08对应CN2,CNPG09接口对应CN3
★在Nx100机器中NCP02的CN06接口的P1组接线为对应CN1,P2组接线为对应CN2等,参见接线图)编码器与机器人间的配线。
④编码器断线检测(开/关)
检测编码器输入线路连接的状态,如果编码器断线则产生1400报警[传输编码器异常],切断机器人伺服电源,机器发生重大故障,要解除机器人故障,先把同步跟踪编码器及线路修复好,才解除故障。
⑤编码器输入类型(编码器/虚拟编码器)
指定是外部给机器人同步基板的编码器输入类型是使用实际编码器还是使用虚拟编码器来实现机器人同步跟踪功能控制。
如果选择虚拟脉冲类型编码器,机器人控制系统的同步机能也能执行/实现同步跟踪功能(即便是没有连接输入编码器信号或者传送带没有运行)。
在调试时,选择哪种类型进行跟踪测试.
⑥编码器符号(向前/退后)
指定从编码器反馈的脉冲位置是传送带向前运转的还是退后运转的方向.
当选择“退后”模式时,传送带跟踪位置的等号和数据在传送带监视器画面下的数值
数据是有符号.所以,机器人控制器执行连续跟踪在退后运动方向的跟踪模式。
(如示意图)
⑦校正方向(向前/退后)
指定连续运动方向机器人控制系统采用向前修正跟踪还是采用退后修正跟踪方式,以确保跟踪效果良好,如果设置方向不一致,则跟踪效果不好.跟踪修正方向。
如示意图
⑧跟踪方式(机器人轴/基座轴)
指定机器人本体同步跟踪方式是用机器人轴还是基座轴(行走轴),如果指定“基座轴”而实际没有基座轴,则不能执行跟踪同步。
⑨用户坐标(1~24)
当跟踪方式指定“机器人轴”时,指定用户坐标的X轴为机器人本体运动时跟踪的方向轴。
⑩基座轴(X/Y/Z)
当跟踪方式指定“基座轴”时,指定基座轴的X轴或者Y轴或者Z轴为运动跟踪的方向轴,如下图为行走机构跟踪Y轴的场合和行走机构跟踪Y轴的场合对就跟踪轴的指定。
(示意图)
⑪位置分辨率(0~999.99μm/pulse)
位置分辨率为编码器每输出一个脉冲对应传送带移动的距离(μm)。
计算方法示意图
※在参考A点位置时(确保此位置脉冲数值的准确性,最好把传送装置按下急停),请登录机器管理模式后,在参考A位置的脉冲数值在【机器人】菜单下的【传送带监视器】画面下显示,显示出参考点A位置的当前脉冲数值,要记录测量数值。
※在参考B点位置时(确保此位置脉冲数值的准确性,最好把传送装置按下急停),请登录机器管理模式后,在参考B位置的脉冲数值在【机器人】菜单下的【传送带监视器】画面下显示,显示出参考点B位置的当前脉冲数值,要记录测量数值。
⑫虚拟传送速度(-32768.0~32767.0mm/sec)
当编码器输入类型为虚拟编码器输入时,设定假想编码器传送速度。
⑬平均行进时间(0~3000ms)
平均行进时间也称移动量平均化时间,一般设置50ms。
⑭重置信号监视时间(0~65535ms)
当执行SYSTART命令时,没有指定的传送带编码器重置信号,设置一个时间用来给
传送带的编码器原点输入信号。
⑮传送带速度低下模式(执行/报警/暂停中断程序)
当传送带速度低于第⒃项设置的传送带极限低下速度时请指定机器人本体的移动状态.
(机器人继续执行程序/机器人报警输出/机器人暂停中断程序(传送带恢复正常运转时,机器人也恢复程序运行))
⑯传送带极限低下速度(0to65535mm/sec)
⑰虚拟编码器输入信号(XRC:
0~256;NX100:
0~1024)
编码器输入设成为虚拟编码器时,当设定的通用输入号码信号有效时,启动虚拟编码器输入模式,
机器人的传输装置的动作模拟让机器人本体做同步动作。
0:
未使用
1~256/1024:
被设定了的通用输入信号变成有效
⑱虚拟编码器输出信号(XRC:
0~256;NX100:
0~1024)
如果“虚拟编码器”在
被选择,在“虚拟编码器输出信号”被设置输出数字的输出信号
0:
未使用
1~256/1024:
被设定了的通用输出信号变成有效。
同步传送基板JANCD-XCP02B-2与XRC控制器间的配线
(1)XCP02-CN03/+24VIN电源要从CPS-150F的2GS取)即从CPS150F-CN03
或者CPS150F-CN02取。
(说明CN03和CN02为同一路)
(2)同步基板JANCD-NCP02-2与NX100控制柜的配线
备注:
同步基板,需要从CPS-420F供电单元的CN05/04接口提供电源给NCP02基板的CN04接口。
电源提供单元CPS-420F之CN05接口的管脚定义:
CPS-420F-CN05-3接NCP02-CN04-1和
CPS-420F-CN05-2接NCP02-CN04-3.
编码器线性驱动器方式:
+5VDC编码器如安川电机制造:
PREA-3C3□/1000或者欧姆龙
公司:
E6B2-CWZ1X1000P/RECDC5V或者E6C3-CWZ3XH1000P/RECDC5V
(3)DX100的场合
3.程序示例
备注:
从MOVJVJ=30.00到SYMOVJVJ=30.0CV#
(1)CTP=0.00命令的转换方法:
按[转换]+[插补方式]
来交叉切换.
4.传送带开始平行移动功能。
窗体顶端
传送带同步跟踪类型的位置的作用,示教位置的行动路径根据传送带位置反馈数据被改正,以机器人本体进行动作位置时以传送带移动的方向进行工件的追踪作业。
有2种同步传送功能类型:
本体跟踪功能控制:
机器人本体的基本的轴移动与传送带相对运动的同步功能。
行走轴跟踪功能控制:
行走轴(外部轴)移动的与传送带的相对运动进行跟踪。
传送带同步的功能中使用“平行功能”时,它根据传送带的原位限位开关的情况,查出限位开关(工件ID证明查出极限开关)和查出限位开关(工作的制件没有检测限位开关),不能在操作器附近被安装时使用,传送带与平移功能同步使用,所有通过限位开关到达同步的工件机器人本体启动位置都可以被管理起来(最大管理起来99个工件),当工件到达机器人开始位置状态时,机器人相关程序工作开始,以便机器人本体可开始工件及传送带进行同步。
当传送带上的原位限位开关没有安装在机器人本体附近时,在上一次工件没有作业完成前,下一个工件可能通过传送带后的工作区域,通过传送带原位限位开关,进入传送带同步的部分,机器人的同步平行功能记录第二个工件的位置,并在机器人的上一次同步作业完成这后,进行此次同步跟踪功能作业。
开始移位功能能处理99个工件从传送带原位限位开关的记录数据,并能实现同步开始平行移动的功能。
开始平行功能示意图
4.3设定传送带位置分辨率
安装在传送带上的编码器发送一个脉冲作为传送带的当前位置。
为了使机械手识别脉冲数作为
同步运动的移动距离,脉冲数必须转换成距离值。
传送带一个脉冲移动的距离(微米)称作“位置分辨率”。
传送带位置分辨率设定单位为⎧。
例如,当位置分辨率为30.00⎧/pulse时,在“POSITIONAL
RESOLUTION”中设定为30⎧/pulse。
设定范围从0~999.99⎧。
由于
 升级会员
升级会员 