第4章作业器具设计.docx
《第4章作业器具设计.docx》由会员分享,可在线阅读,更多相关《第4章作业器具设计.docx(10页珍藏版)》请在冰豆网上搜索。
第4章作业器具设计
第4章作业器具设计
4.1手握式工具设计
4.1.1.手握式工具设计的生理学基础
手是人类最重要的运动器官之一,日常生活、工作中的大多数活动需要通过手或者手的配合来完成。
人的双手能做复杂而灵巧的捏、握、抓、夹、提等的动作,有极其精细的感觉。
人手是由骨骼、肌肉、神经、韧带、血管等组成的复杂结构。
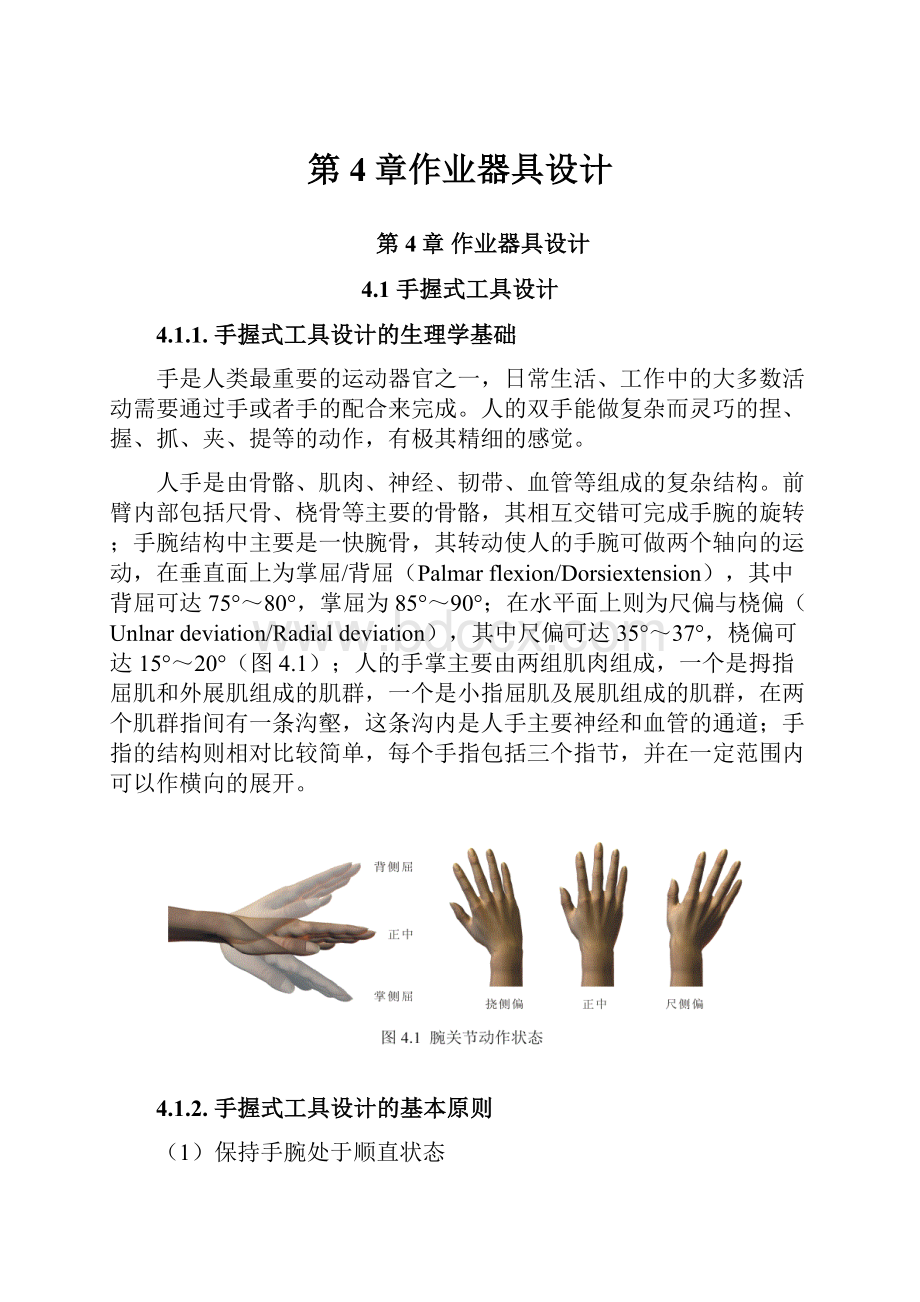
前臂内部包括尺骨、桡骨等主要的骨骼,其相互交错可完成手腕的旋转;手腕结构中主要是一快腕骨,其转动使人的手腕可做两个轴向的运动,在垂直面上为掌屈/背屈(Palmarflexion/Dorsiextension),其中背屈可达75°~80°,掌屈为85°~90°;在水平面上则为尺偏与桡偏(Unlnardeviation/Radialdeviation),其中尺偏可达35°~37°,桡偏可达15°~20°(图4.1);人的手掌主要由两组肌肉组成,一个是拇指屈肌和外展肌组成的肌群,一个是小指屈肌及展肌组成的肌群,在两个肌群指间有一条沟壑,这条沟内是人手主要神经和血管的通道;手指的结构则相对比较简单,每个手指包括三个指节,并在一定范围内可以作横向的展开。
4.1.2.手握式工具设计的基本原则
(1)保持手腕处于顺直状态
手腕顺直操作时,腕关节处于正中的放松状态。
但当手腕处于掌屈、背屈、尺偏等别扭的状态时,会使腕部酸痛、握力减小。
如长时间这样操作,会引起腕道综合症、腱鞘炎、肱骨外踝炎(网球肘)等症状。
把手弯曲式的工具可以降低疲劳,容易操作,对于腕部有损伤者特别有利。
(图4.2)一般认为,将工具的把手与工作部分弯曲10°左右效果最好。
(2)减轻掌部组织所受压迫
操作手握式工具时有时需要施加相当的力,如果工具设计不当,会在掌部和手指处造成很大的压力,妨碍血液在尺动脉的循环,引起局部却血,导致麻木、刺痛感等。
手把设计应具有较大的接触面,使压力能分布于较大的手掌面积上,减少应力;或者使压力作用于不太敏感的区域,如拇指与食指之间的虎口位置。
(图4.3)如果没有特殊作用,把手上最好不留指槽,因为人体尺度不同,不合适的指槽可能造成某些操作者手指局部的应力集中。
图4.3减轻掌部组织所受压迫的手握式工具
(3)避免手指重复动作
反复用食指操作扳机式控制器,会导致狭窄性腱鞘炎(扳机指)。
设计时应尽量避免食指做这类动作,可以用拇指或指压板代替。
(图4.4)拇指由局部肌肉控制,重复拇指动作比重复食指动作的危害性小一些。
对于拇指,应尽可能避免过度伸展,而多个手指则可分散用力。
图4.4用拇指或多个手指控制的手握式工具
4.1.3.把手设计
把手是手握式工具与手接触的部分,一般由掌面与手指周向抓握。
把手直径取决于工具的用途与手的尺寸。
一般而言,着力抓握的把手比较合适的直径是30~40mm,精密抓握的把手比较合适的直径是8~16mm。
把手长度主要取决于手掌宽度。
根据第5百分位女性到第95百分位男性数据,掌宽一般在71~97mm之间,合适的把手长度为100~125mm。
把手的截面形状也应根据作业性质考虑。
对于着力抓握,把手与手掌的接触面积越大,则压应力越小,因此圆形截面把手较好。
为了防止与手掌之间的相对滑动,可以采用三角形或矩形截面的把手,这样也可以增加工具放置时的稳定性。
为了增大摩擦,并使手感舒适,把手上经常会设置各种槽纹、凸起,还可以使用皮革、橡胶等质地较软的材料。
双把手工具(如剪刀、老虎钳)设计时还需要考虑抓握空间。
当抓握空间宽度为45~80mm时,抓力最大。
为适应不同的使用者,最大握力应限制在100N左右。
此外,人在使用工具时,用手有习惯性,约90%的人惯用右手,10%的人惯用左手。
男女使用工具的能力也有不同,女性约占人群的48%,平均手长约比男性短2cm,握力只有男性的2/3。
这些设计时都应加以考虑。
4.2工作座椅设计
座椅按照用途的不同可分为三类:
简易座椅,如板凳;工作座椅,如办公室或操作场所座椅,多用于长时间就座;休息座椅,适用于客室、休息室及各种交通工具的乘客用椅。
以下以工作座椅为代表探讨座椅的人机工程设计。
4.2.1.坐姿与工作座椅设计的生理学基础
坐姿是经常使用的工作姿势,相对于站姿和其它工作姿势具有明显优点:
坐姿可以减轻人体足踝、膝部、臀部和脊椎等关节部位所受的静肌力作用,减少人体能耗、消除疲劳;坐姿比站姿更有利于血液循环;坐姿还有利于保持身体的稳定,更适合静态作业、精细作业和脚操作场合。
工作座椅直接影响着坐姿,工作座椅的设计需要考虑以下人体生理学基础:
(1)脊柱形态
坐姿时人体的支撑结构为:
脊柱、骨盆、腿和脚,其中脊柱最关键。
脊柱由33块脊椎骨靠复合韧带和介于其间的椎间盘连接组成,从侧面观察有四个生理弯曲,即颈弯、胸弯、腰弯及骶弯,保证腰弧曲线的正常形状是获得舒适坐姿的关键。
(图)分析腰椎的变形,可以发现当腰部支承在靠背上,使躯干与大腿间呈115°角时腰椎的弯曲与自然形态最接近,是最舒适的姿势;上体取铅直姿势时,不使用腰部支承反而比腰部支承有利,担长时间坐姿时,为了了能将腿前伸而得到休息,还是应有腰部支撑;为使坐姿下腰弧曲线变形最小,座椅应在腰椎部提供两点支承,第一支撑应位于第5、6胸椎之间,相当于肩胛骨的高度,称为肩靠,第二支承应位于第4、5节腰椎之间的高度上,称为腰靠,合理的腰靠应该使腰弧曲线处于正常的生理曲线。
(2)肌肉活动度
脊椎骨依靠肌肉和肌腱连接,一旦脊椎偏离自然状态,肌腱组织就会受到拉力或压力,使肌肉活动度增加,导致疲劳酸痛。
根据研究,在挺直坐姿下,因为腰椎前向拉直使肌肉组织紧张受力,腰椎部位肌肉活动度高,提供靠背支承腰椎后活动度则明显减小;躯干前倾时,背上方和肩部肌肉活动度高,以桌面作为前倾时手臂的支承并不能降低活动度。
(3)体压分布
人体结构在骨盆下方有两块圆骨,称为坐骨结构。
人体坐骨粗壮,能比周围的肌肉承受更大的压力;而大腿底部有大量血管和神经系统,压力过大会影响血液循环和神经传导而导致不适。
所以座垫上的压力应按照臀部不同部位承受不同压力的原则来设计,即在坐骨处压力最大,向四周逐渐减少,至大腿时压力渐至最低值。
(图4.6)
图4.6理想体压分布曲线(102Pa)
(4)体态平衡
人的坐姿并不是固定不变的方式,还包括通过改变坐姿来压力分布、缓解肌肉疲劳,同时根据坐姿的变化不断地保持身体平衡的动作。
坐姿的调节和自发稳定坐姿的动作同属体态平衡,即就座者达到变化和稳定时的中间过程。
由于坐姿有各种特征,所以由变化到平稳的活动类型就会不同。
因此,座椅的设计必须能够满足这种平衡要求,使就座者能灵活、平稳地进行体态自动调节。
4.2.2.工作座椅设计的基本原则
①座椅的样式和尺寸应适宜人体尺度和坐姿;
②座椅要适于就座者的体位并保持其稳定;
③座椅要适于就座者保持不同姿势和调节坐姿的需要;
④靠背的结构和形状要尽可能减少就座者背部和脊柱疲劳;
⑤座椅上应配有适当质地的座垫以改善臀部及背部的体压分布。
4.2.3.工作座椅人机工程设计
我国1994年7月1日开始实施的GB/T14774-1993《工作座椅一般人类工效学要求》给出了一般工作场所(含计算机房、打字室、控制室、交换台等场所)坐姿操作人员使用的工作座椅的术语、结构型式、主要尺寸和一般人类工效学要求。
工作座椅设计需要考虑的重要因素包括座高、座宽、座深、腰靠等。
(1)座高
座高又称座面高,是指坐骨下支点的臀部到地面的高度。
就座者穿着规定的工作服装和鞋子,就座后两脚平放于地板上,小腿与地板垂直,大腿下缘处处于与座面平行的位置,这时的座面高,即为工作座椅座面的恰当高度。
为了避免座面前缘压迫大腿导致血液循环不畅,座椅的高度一般不应超过小腿较短的人所适应的高度。
根据中国成年人人体尺寸,我国的工作座椅座面高a取360~480mm为宜。
为适应不同人体尺寸的需要,工作座椅可以设计为座高可调的结构。
(2)座宽
考虑到男女肥胖者的需要,座宽一般依据女性中第95百分位的臀宽尺寸设计。
无扶手的工作座椅座宽b应在370~420mm之间,推荐值为400mm。
扶手座椅的座宽应不小于50mm。
(3)座深
座深应保证就座者在各种坐姿下靠背能够支承腰部,避免座深太大导致弓腰才能靠到椅背,或座深太小导致大腿失去支承。
我国的工作座椅座深c应取360~390mm为宜,推荐值为380mm。
(4)座面倾角
座面倾角是指座面前端翘高之后,座面相对于水平面的夹角。
座面向后倾斜的座椅会使就座者自然地后倚,通过靠背的支承减少背部肌肉承受的静负荷,还可以防止就座者从座面上滑落。
工作座椅的后倾座角α取0°~5°为宜,推荐值为3~4°。
(5)腰靠
靠背可以帮助脊柱保持正常、轻松的姿态,其形状和角度是重要的参数。
根据GB/T14774-93,腰靠长d应在320~340mm之间(推荐值330mm),腰靠宽e应在200~300mm之间(推荐值250mm),腰靠厚f应在35~50mm之间(推荐值40mm),腰靠高g应在165~210mm之间,腰靠圆弧半径R应在400~700mm之间(推荐值550mm),倾覆半径r应为195mm,腰靠倾角β应在95º~115º之间(推荐值110º)。
(以上参数所示意义见图4.7)
图4.7一般工作座椅结构形式
此外,工作座椅的人机工程设计还要考虑坐面、腰靠、支架、扶手等各部分的要求,具体可参见GB/T14774-1993。
4.2.4.典型的工作座椅设计
1.古代的工作座椅设计
对于座椅的人机工程设计,早在数千年前就不自觉地开始了。
古埃及的工匠们工作时使用的小凳,一般有三条外叉腿,坐面呈弧形凹陷,人坐在上面,后部翘起部分正好支在骶部,比较舒服(图4.8);古希腊和古罗马继承并发展了古埃及坐具文明的成就,其代表作克里斯莫斯椅(klismoschair),优美的线条从力学的角度看是科学的,从舒适的角度看也是优秀的(图4.9)。
2.适应人体尺度的工作座椅设计
现代人机工程学后,座椅的设计开始建立在人体测量的基础上。
1948年瑞典整形外科医生阿盖布罗姆(BengtAkerblom)出版专著《站与坐的姿势》,系统地论述了人体不同姿态对肌肉及关节的影响,1954年他完成了著名的阿盖布罗姆座椅靠背曲线,并基于此展开了符合人机工程的座椅设计。
(图4.10)许多国家在上世纪70年代已经将座椅研究的成果制定成标准,指导工业生产,包括:
学校课桌椅、办公用椅、工作座椅、飞机座椅、汽车座椅、火车座椅等,如我国的GB/T14774-1993《工作座椅一般人类工效学要求》、GB/T3976-2002《学校课桌椅功能尺寸》等。
图4.10Akerblom座椅靠背曲线与Akerblom设计的座椅
以上座椅设计方法的核心思想是,依据作业者的基本人体尺度和生理特性,要求工作座椅的设计与之相适应,如GB/T14774-1993《工作座椅一般人类工效学要求》即基于引用标准GB10000《中国成年人人体尺寸》。
这无疑是人机工程学发展至“科学人机工程学”阶段以来的基本思路,即以“人的因素”为设计的出发点,力求使产品适应于人的尺度和特性。
以设计去被动地“适应”人,是人机工程设计最直接、最基本、也是最简单的方式。
其体现了“以人为本”的最初理念,保证了“人”在人机系统中的基础和核心地位,发挥了人在其中的主导作用,但同时也容易因此忽视设计在人机关系中的积极作用,甚至可能因为放纵人的本能习性而导致负面效果,例如使用符合以上标准的工作座椅并不能完全避免作业者疲劳、疾病和损害的现象。
3.引导人体坐姿的工作座椅设计
就人体骨骼的形态构造而言,坐姿因脊椎被强制改变自然曲度而形成的椎间压力使人在久坐之后容易感到腰酸背疼。
站姿能够使脊椎处于自然状态,但长久支撑人体重量的下肢却容易疲劳。
膝靠式座椅即是为了解决这一矛盾而被创造出来的。
膝靠式座椅设计有两个与人体接触的面,其中坐面与竖直方向成60~70º角前倾,而臀部承受的压力则有一部分被分散到支撑胫骨的承托面上。
通过降低膝盖对于骨盆的相对位置,迫使人采用上身前倾的坐姿,从而使脊椎保持自然曲度,减轻腰椎间盘的压力,放松背部肌肉(图4.11)。
图4.11巴兰斯椅及其坐姿比较图
膝靠式座椅是上世纪七十年代由挪威设计师PeterOpsvik、OddvinRykken、SveinGusrud等人基于HansChristianMengshoel的支撑胫骨的坐具研究成果而分别发明的。
典型的膝靠式座椅包括HAG公司、斯托克公司(Stokke)的巴兰斯椅(BalansChair)等。
膝靠式座椅的设计体现了人机工程设计的另一思路,即通过设计主动地“引导”人以更为合理的方式生活和作业。
这一思路的逻辑同样以“人”为核心,但不仅研究人“是”怎样的,而更关注人“应该”怎样,从而发挥设计的导向性作用,避害趋利,推动人向正面、积极的、完善的方向发展。
但膝靠式座椅也存在着因坐姿受限而导致的上体无法后仰、腰椎和肩部无法得到支撑等弊端。
这是因为这一思路在提出“引导”的同时也提出了“限制”,限制了人以更为自主的、灵活的、变化的方式调整坐姿。
4.人机互动的工作座椅设计
作为一个人机系统中的两个要素,就坐者与座椅之间的关系则应该是相互联系、相互影响的,二者相互配合以实现系统最优。
以“脊椎”扶手椅(Armchair"Vertebra")位代表的座椅即是这一设计思路的体现。
“脊椎”扶手椅的特点在于它不仅能够适合人的脊椎骨骼,而且能够根据人体的不同坐姿而改变形态构成,以提供更舒适的支撑。
与常见的可手动调节高度、靠背倾斜度的座椅不同,“脊椎”扶手椅无需手工调节就能自动感应并响应用户变化着的需要,因而更适合频繁的、往复的、特别是无意识的坐姿调整:
当身体挺直时,座椅就保持适应垂直坐姿的形态;当身体前倾完成书写等作业时,椅面前方就自动向低处倾斜6°,使人的膝盖略低于骨盆,以保证脊椎呈现自然曲度;身体在放松后仰时,椅面会往前滑动,而椅背向后倾斜,再推一下,它的倾斜度能继续增加12°,使坐姿更加舒适(图4.12)。
“脊椎”扶手椅提供了至少三种适合不同坐姿的形态,每一形态的设计都基于精确的解剖研究和严谨的矫形检查的成果,充分地适应人的身体尺度和生理特性,更为关键的是,它能够在此基础上又以形态适当地引导人以正确姿势作业。
“脊椎”扶手椅的设计建立了一种“互动”的人机关系,即人根据作业和自身需要自主地选择和调整坐姿,座椅据此实时、自动、变化地反馈以相应的形态以适应之;同时,座椅的适应不是盲目、被动的,而是以预定的、有依据的形态进一步引导着人呈现合理的坐姿。
其中人与座椅都影响对方,也都被对方所影响,两者各自发挥主动性,相互协调、相互校正,共同实现理想的作业模式。
 升级会员
升级会员 