控制系统的综合设计课程设计论文.docx
《控制系统的综合设计课程设计论文.docx》由会员分享,可在线阅读,更多相关《控制系统的综合设计课程设计论文.docx(24页珍藏版)》请在冰豆网上搜索。
控制系统的综合设计课程设计论文
自动控制原理课程设计
专业:
电自动化
设计题目:
控制系统的综合设计
班级:
学生姓名:
学号:
指导教师:
分院院长:
教研室主任:
电气工程学院
一、课程设计任务
1、设计内容
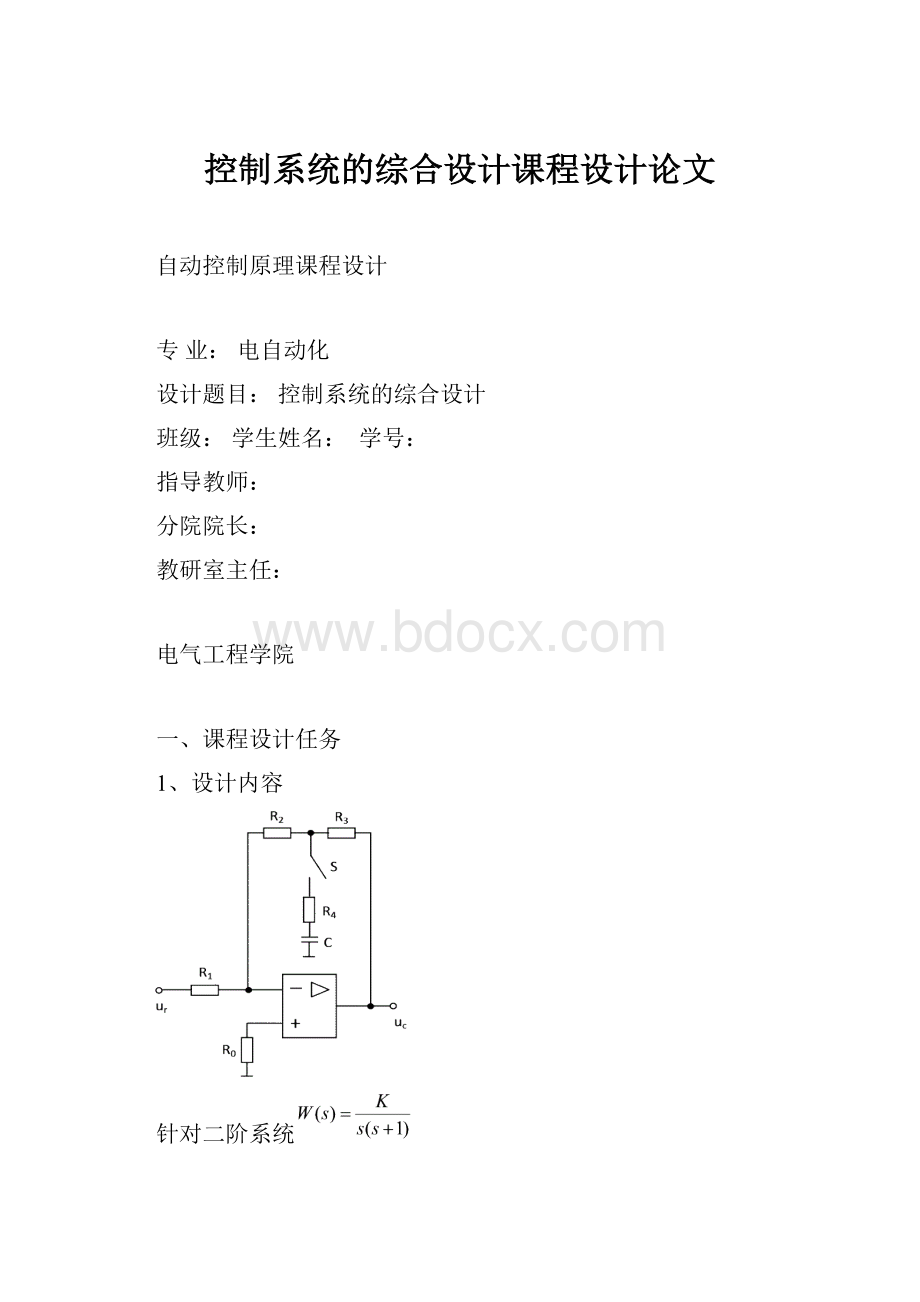
针对二阶系统
,利用有源串联超前校正网络(如图所示)进行系统校正。
当开关S接通时为超前校正装置,其传递函数
,其中
,
,
,“-”号表示反向输入端。
若Kc=1,且开关S断开,该装置相当于一个放大系数为1的放大器(对原系统没有校正作用)。
2、设计要求
1)引入该校正装置后,单位斜坡输入信号作用时稳态误差
,开环截止频率c’≥4.4弧度/秒,相位裕量γ’≥45°;
2)根据性能指标要求,确定串联超前校正装置传递函数;
3)设校正装置R1=100K,R2=R3=50K,根据计算结果确定有源超前校正网络元件参数R4、C值;
4)绘制引入校正装置后系统电路原理图(设给定的电阻和电容:
R=100K,C=1F、10F若干个);
5)利用Matlab仿真软件辅助分析,绘制校正前、后及校正装置对数频率特性曲线,并验算设计结果;
6)在Matlab-Simulink下建立系统仿真模型,求校正前、后系统单位阶跃响应特性,并进行系统性能比较;
7)利用自动控制原理实验箱完成硬件系统设计,包括:
搭建校正前后系统电路、输入阶跃信号并通过示波器观察校正前后系统输出响应曲线。
3.课程设计报告要求
(1)设计报告包括内容
1)理论计算校正装置的过程;
2)绘制系统电路图时各环节参数的计算过程(包括有源校正装置R4和C的计算过程);
3)利用Matlab仿真软件辅助分析设计的程序及校正前、后对数频率特性曲线;
4)利用Matlab-Simulink建立校正前、后系统仿真模型,求单位阶跃响应曲线,并计算校正前后系统超调量、调节时间,给出结论;
5)硬件系统设计过程及设计结果,给出结论。
(2)在设计过程中遇到的软、硬件问题及解决的办法
(3)课程设计总结
包括:
本次课程设计过程中的收获、体会,以及对该课程设计的意见、建议等。
(4)上交电子版设计报告
(5)设计中参考文献列表
(6)报告使用B5纸打印
5.参考资料
[1]王建辉等.自动控制原理.北京:
清华大学出版社.2007
[2]胡寿松.自动控制原理.北京:
科学技术出版社.2001
[3]薛定宇.反馈控制系统设计与分析—MATLAB语言应用(第1版).北京:
清华大学出版社.2000
[4]薛定宇.控制系统计算机辅助设计—MATLAB语言及应用.北京:
清华大学出版社.1996
[5]罗忠宝.自动控制原理实验指导书.长春:
本校自编教材
6.设计进度(2013年6月17日~6月30日)
时间
设计内容
6.17-6.18
布置设计任务、查阅资料、理论设计
6.19-6.27
Matlab仿真设计、Simulink仿真分析
6.28-6.30
写设计报告并提交
7.课程设计时间及地点
2013年6月17日-2013年6月30日
上午:
8:
30-11:
30;下午:
1:
00-4:
00
地点:
新实验楼323
自动控制原理课程设计
专业:
电自动化
设计题目:
控制系统的综合设计
班级:
1143学生姓名:
黄乾学号:
28
指导教师:
刘晓梅
分院院长:
许建平
教研室主任:
高纯斌
电气工程学院
目录
第一章课程设计内容与要求分析1
1.1设计内容1
1.2设计要求2
第二章理论分析3
2.1数据计算与分析3
2.1.1确定原系统传递函数3
2.1.2分析原系统频率特性3
2.1.3确定校正装置数学模型4
2.1.4分析校正后系统频率特性4
2.1.5确定校正装置中R4和C的值5
2.2系统模型设计6
2.2.1比例积分环节电路模型设计6
2.2.2惯性环节电路模型设计7
2.2.3校正装置电路模型设计8
第三章软件仿真设计9
3.1绘制原系统的频率特性10
3.2绘制校装置频率特性11
3.3校正后系统频率特性11
3.4比较校正装置,原系统和校正后系统的频率特性12
3.5SIMULINK仿真分析(求校正前、后系统单位阶跃响应)14
3.5.1原系统单位阶跃响应14
3.5.2校正后系统单位阶跃响应15
3.5.3校正前、后系统单位阶跃响应比较16
第四章实验测量17
第五章自动控制原理课程设计总结19
参考文献20
评语及成绩
第一章课程设计内容与要求分析
1.1设计内容
针对二阶系统
,利用有源串联超前校正网络(如图所示)进行系统校正。
当开关S接通时为超前校正装置,其传递函数
,其中
,
,
,“-”号表示反向输入端。
若Kc=1,且开关S断开,该装置相当于一个放大系数为1的放大器(对原系统没有校正作用)。
图1-1校正装置电路图
1.2设计要求
1)引入该校正装置后,单位斜坡输入信号作用时稳态误差
,开环截止频率c’≥4.4弧度/秒,相位裕量γ’≥45°;
2)根据性能指标要求,确定串联超前校正装置传递函数;
3)设校正装置R1=100K,R2=R3=50K,根据计算结果确定有源超前校正网络元件参数R4、C值;
4)绘制引入校正装置后系统电路原理图(设给定的电阻和电容:
R=100K,C=1F、10F若干个);
5)利用Matlab仿真软件辅助分析,绘制校正前、后及校正装置对数频率特性曲线,并验算设计结果;
6)在Matlab-Simulink下建立系统仿真模型,求校正前、后系统单位阶跃响应特性,并进行系统性能比较;
7)利用自动控制原理实验箱完成硬件系统设计,包括:
搭建校正前后系统电路、输入阶跃信号并通过示波器观察校正前后系统输出响应曲线。
第二章理论分析
2.1数据计算与分析
2.1.1确定原系统传递函数
有开环传递函数
知,系统为Ⅰ型系统,又有稳态误差
,所以
(取K=10)
校正前系统的开环传递函数为
2.1.2分析原系统频率特性
由
得,原系统的穿越频率
原系统的相位裕度如下:
根据
令
求得
微分校正装置交接频率比
2.1.3确定校正装置数学模型
根据
求得
校正装置为
2.1.4分析校正后系统频率特性
系统校正后的传递函数为
校正后系统的相位裕度为
=49.8°>45º满足要求
校正后系统的幅值特性为
校正后系统的幅值裕度为
校正后系统的频率特性如上所示,均满足校正装置的要求。
2.1.5确定校正装置中R4和C的值
校正装置如图2-1所示。
图2-1校正装置电路图
由图可知校正系统的传递函数
其中:
;
;
,
。
R=8.3KΩ
C=13.7uF
2.2系统模型设计
2.2.1比例积分环节电路模型设计
比例积分环节电路如图2-2所示。
图2-2比例积分环节
这个电路的要求是RC=1/10,为什么是这个要求呢,因为这个积分电路我们要实现的就是10/S,所以会有RC=10这一要求,在之后的硬件电路的搭建中,我们也是依靠传递函数,在这里就不在一一赘述。
我们假定C=1uF,所以我们可以算出R=100KΩ,如下所示。
2.2.2惯性环节电路模型设计
惯性环节如图2-3所示。
图2-3惯性环节
对于这个电路,我们的要求是两个电阻的阻值相等,且RC=1,这个算法在我们的传递函数1/(s+1)中就可以体现出来。
2.2.3校正装置电路模型设计
校正装置电路如图2-5所示。
图2-4校正装置
这个电路中容值和阻值的选择我们在上面的电路中已经很详细的介绍过,在这里就不在赘述了。
第三章软件仿真设计
利用MATLAB进行仿真设计(校正),就是借助MATLAB相关语句进行上述运算,完成以下任务:
确定校正装置;
绘制校正前、后、校正装置对数频率特性;
确定校正后性能指标。
从而达到利用MATLAB辅助分析设计的目的。
任务要求单位反馈线性系统开环传递函数为:
要求系统在单位斜坡输入信号作用时,开环截止频率c≥4.4弧度/秒,相位裕量≥450,利用MATLAB进行串联超前校正。
3.1绘制原系统的频率特性
绘制原系统对数频率特性,并求原系统幅值穿越频率wc、相位穿越频率wj、相位裕量Pm、幅值裕量Gm
num=[10];
den=[1,1,0];
W=tf(num,den);
bode(W);
margin(W);
[Gm,Pm,wj,wc]=margin(W);
grid;
原系统伯德图如图3-1所示,其截止频率、相位裕量、幅值裕量从图中可见。
另外,在MATLABWorkspace下,也可得到此值。
由于截止频率和相位裕量都小于要求值,故采用串联超前校正较为合适。
根据下面的这个图分析,我们可以很清楚的知道原系统的相位裕量为18deg,穿越频率为3.08rad/sec,不符合我们的要求,所以我们应该加一个校正装置。
图3-1校正前系统频率特性
3.2绘制校装置频率特性
求校正装置Wc(s)(即Wc)传递函数
numc=[0.456,1];
denc=[0.114,1];
Wc=tf(numc,denc);
bode(Wc);
grid;
执行程序后,校正装置的频率特性如图3-2所示,仔细观察数据,我们可以看到,这个校正装置是可以实现我们的要求的。
图3-2校正装置频率特性
3.3校正后系统频率特性
求校正后系统传递函数W(s)
num=[4.56,10];
den=[0.114,1.114,1,0];
W=tf(num,den);
bode(W);
margin(W);
[Gm,Pm,wj,wc]=margin(W);
grid;
执行程序后,校正后系统的频率特性如图3-3所示,加上校正装置后,我们可以发现整个系统的相位裕度为49.6deg,穿越频率为4.43rad/sec,符合我们的要求。
图3-3校正后系统频率特性
3.4比较校正装置,原系统和校正后系统的频率特性
绘制校正后系统对数频率特性,并与原系统及校正装置频率特性进行比较;求校正后幅值穿越频率wc、相位穿越频率wj、相位裕量Pm、幅值裕量Gm。
num=[10];
den=[1,1,0];
W=tf(num,den);
bode(W);
margin(W);
[Gm,Pm,wj,wc]=margin(W);
grid;
num=[4.56,10];
den=[0.114,1.114,1,0];
Wh=tf(num,den);
bode(Wh);
margin(Wh);
[Gm,Pm,wj,wc]=margin(Wh);
grid;
numc=[0.456,1];
denc=[0.114,1];
Wc=tf(numc,denc);
bode(Wc);
grid;
bode(W,':
');
holdon;
bode(Wc,'-.');
holdon;
bode(Wh);
grid;
执行程序后,频率特性如图3-4所示
图3-4系统频率特性对比
3.5SIMULINK仿真分析(求校正前、后系统单位阶跃响应)
线性控制系统校正过程不仅可以利用MATLAB语句编程实现,而且也可以利用MATLAB--SIMULINK工具箱构建仿真模型,分析系统校正前、后单位阶跃响应特性。
3.5.1原系统单位阶跃响应
用MATLAB—SIMULINK绘制原系统仿真模型如图3-5所示。
图3-5原系统模型
校正前系统仿真波形图如图3-6所示,我们可以看出来,系统不是很稳定。
图3-6原系统仿真波形图
3.5.2校正后系统单位阶跃响应
校正后系统仿真模型如图3-7所示。
图3-7校正后系统仿真模型
校正后系统仿真波形如图3-8所示。
在加了校正装置后,系统变得很稳定,但是这个图不能很明显的表示出加入校正装置的作用。
图3-8校正后系统仿真波形图
3.5.3校正前、后系统单位阶跃响应比较
校正前后仿真模型如图3-9所示。
图3-9校正前后系统仿真模型
校正前后系统仿真波形如图3-10所示。
这个图很清晰的表示出了系统校正前后的稳定性的变化,清晰而直观。
让我们能清楚的看见校正装置的作用。
图3-10校正前后系统仿真图形
第四章实验测量
系统电路图如图4-1所示。
图4-1系统电路图
连接电路后,校正前系统阶跃响应如图4-2所示,由这个图我们就可以看出,在实际中,未校正之前系统不是很稳定。
图4-2校正前系统阶跃响应
校正后系统阶跃响应如图4-3所示,由这个图,我们可以看出,在实际中,校正装置的作用,在加入校正装置后,我们可以很明显的看出系统变稳定了。
图4-3校正后系统阶跃响应如图所示
第五章自动控制原理课程设计总结
经过几天的课设实习,其中的艰辛就就是要慢慢的弄懂软件的功能,非常陌生的东西只能是一点一点的去摸索,课设让我们学了好多我们没有放弃因为学东西都是慢慢来的。
生活就是这样,汗水预示着结果也见证着收获。
劳动是人类生存生活永恒不变的话题。
通过课设实习,我才真正领略到“艰苦奋斗”这一词的真正含义,我才意识到老一辈测绘为我们的社会付出。
我想说,测绘确实有些辛苦,但苦中也有乐,在如今物欲很流的世界,很少有机会能与大自然亲密接触,但我们可以,而且测绘也是一个团队的任务,一起的工作可以让我们有说有笑,相互帮助,配合默契,多少人间欢乐在这里洒下,大学里一年的相处还赶不上这十来天的实习,我感觉我和同学们之间的距离更加近了;我想说,测绘确实很累,但当我们所测的数据制成成果时,心中也不免产生兴奋;正所谓“三百六十行,行行出状元”。
我们同样可以为社会作出我们应该做的一切,这有什么不好?
我不断的反问自己。
也许有人不喜欢野外的工作,也许有人认为测绘的工作环境不好,但我认为无论干什么,只要人生活的有意义就可。
社会需要我们,我们也可以为社会而工作。
既然如此,那还有什么必要失落呢?
于是我决定沿着自己的测绘路,执着的走下去。
社会需要我们,我们也可以为社会而工作。
既然如此,那还有什么必要失落呢?
于是我决定沿着自己的测绘路,执着的走下去。
同时我认为我们的工作是一个团队的工作,团队需要个人,个人也离不开团队,必须发扬团结协作的精神。
某个人的离群都可能导致导致整项工作的失败。
实习中只有一个人知道原理是远远不够的,必须让每个人都知道,否则一个人的错误,就有可能导致整个工作失败。
团结协作是我们实习成功的一项非常重要的保证。
而这次实习也正好锻炼我们这一点,这也是非常宝贵的。
参考文献
[1]王建辉等.自动控制原理.北京:
清华大学出版社.2007
[2]胡寿松.自动控制原理.北京:
科学技术出版社.2001
[3]薛定宇.反馈控制系统设计与分析—MATLAB语言应用(第1版).北京:
清华大学出版社、2000
[4]薛定宇.控制系统计算机辅助设计—MATLAB语言及应用.北京:
清华大学出版社.1996
[5]罗忠宝.自动控制原理实验指导书.长春:
本校自编教材
评语及成绩
评分项目
评分标准
量化分数
1.理论分析计算能力
很强
较
强
一
般
较差
不
行
20
2.仿真设计能力
很强
较强
一般
较差
不
行
20
3.硬件设计能力
很强
较强
一般
较差
不
行
20
4.设计报告规范程度
规范
整洁
正确
杂乱
有错误
20
5.设计态度
积极主动
比较认
真
应
付
不认真
10
6.出勤情况
全勤
缺勤
次数
10
附加评语
量化总分
指导教师:
成绩:
 升级会员
升级会员 