ALMCBV主板驱动菜单设定参数中文解释.docx
《ALMCBV主板驱动菜单设定参数中文解释.docx》由会员分享,可在线阅读,更多相关《ALMCBV主板驱动菜单设定参数中文解释.docx(17页珍藏版)》请在冰豆网上搜索。
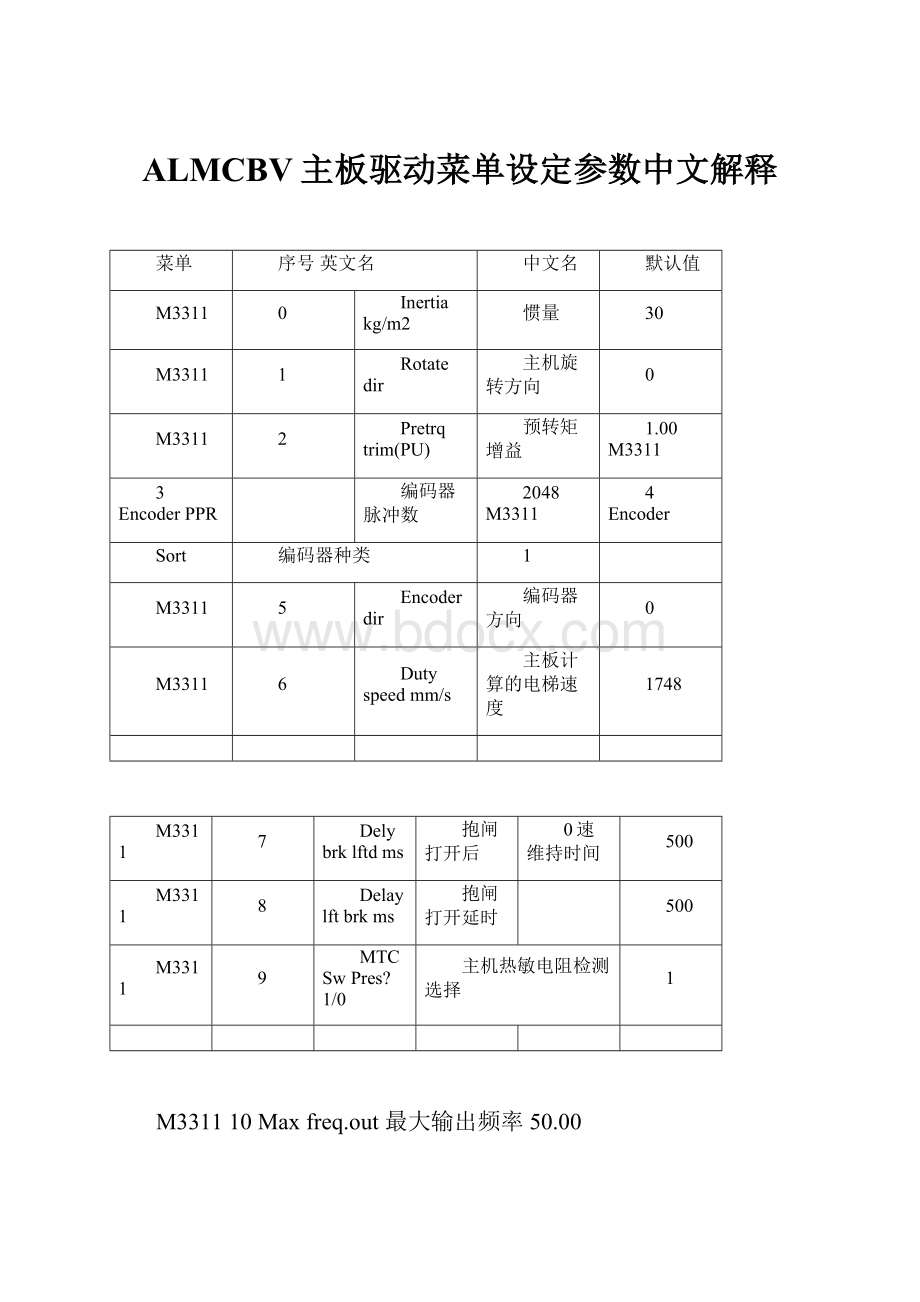
ALMCBV主板驱动菜单设定参数中文解释
菜单
序号英文名
中文名
默认值
M3311
0
Inertiakg/m2
惯量
30
M3311
1
Rotatedir
主机旋转方向
0
M3311
2
Pretrqtrim(PU)
预转矩增益
1.00M3311
3EncoderPPR
编码器脉冲数
2048M3311
4Encoder
Sort
编码器种类
1
M3311
5
Encoderdir
编码器方向
0
M3311
6
Dutyspeedmm/s
主板计算的电梯速度
1748
M3311
7
Delybrklftdms
抱闸打开后
0速维持时间
500
M3311
8
Delaylftbrkms
抱闸打开延时
500
M3311
9
MTCSwPres?
1/0
主机热敏电阻检测选择
1
M331110Maxfreq.out最大输出频率50.00
M33120Spdp1gain0比例调节器增益11500
M3312
1
SpdI1gain0
积分调节器增益
1
500
M3312
2
Spdp2gain
比例调节器增益
2
1500
M3312
3
SpdI2gain
积分调节器增益2
500M3312
4SGPtran21thr%
SGP转换21阈值
30M3312
5
SGPtran21
band%
SGP转换21带宽
10M3312
6feedbackfilter1
速度滤波系数1
300M3312
7
feedbackfilter2
速度滤波
系数2
300
给定的速度与反馈的速度误差范
M3312
8
TrackErrormm/s
围
500
M3312
9
Manaccel(mm/s2)
手动加速度
700M3312
10Manspeed(mm/s)
手动速度
250M3312
11overspeed
(PU)
过速比例
1.10
M33130BrkSwPres?
1/0抱闸反馈开关检测选择1
M33140RatedPower(Kw)主机额定功率11.7
M3314
1
Numberofpoles
主机极数
24
M3314
2
RatedRPM
主机额定转速
167
M3314
3
Ratedfrq(Hz)
主机额定频率
33.40M3314
4Ratedvoltage(V)
主机额定电压
340M3314
5Dutyload
(kg)
电梯额定载重
800M3314
6RatedI(A)
主机额定电流
26.0
M33147RatedTrq(Nm)主机额定扭矩669
M33160Brkdectdlayms抱闸反馈开关检测时间500
M3316
2Brakesettle(ms)
10mm/stlim(ms)
抱闸关闭延时(有转矩保
电梯停车
0速时间
500M3316
0M3316
3APR
time(ms)
启动力矩时间补偿
200
M3319
0
Floornumber
楼层数
6
M3319
1
Velocitynormal
电梯额定速度
1000
M3319
2
Acceleranormal
加速度
600M3319
3Jerk0normal
加加速度0
500M3319
4Jerk1
normal
加加速度1
500M3319
5Deceleranormal
减速度
600
M3319
6
Jerk2normal
加加速度2
350
M3319
7
Jerk3normal
加加速度3
350
M3319
8
Velocityinspect
检修速度
200
M3319
9
Accelerainspect
检修加速度
200
M3319
10
Velocitylearn
自学习速度
200M3319
11positiongain
位置增益
20M3319
12Velocity
relevel
在平层速度
30
M3319
13
Accelerarelevel
在平层加速度
300
M3319
14
DeceleraNTSD
NTSD减速度
1000M3319
15JerkNTSD
NTSDJERK
200M3319
16posdelay(ms)
100M3319
17Shvdiam(mm)
曳引轮直径
400M3319
18Gearratio
减速比
1.0
M3319
19
Roperatio
绕绳比
2
M3319
20
Runenable
运行使能
1
M3310
0
Uplevel
上行平层调整
147
M3310
1
Downlevel
下行平层调整
147
M335
0
Loaddevicetype
称重开关类型
0
M335
1
load%donoSw
空载下行补偿量
3
M335
2
load%upnoSw
空载上行补偿量
7
M335
3
load%doSw10
10%负载下行补偿量
15
M335
4
load%upSw10
10%负载上行补偿量
25
M335
5
load%doSw30
30%负载下行补偿量
35
M335
6
load%upSw30
30%负载上行补偿量
45
M335
7
load%doSw50
50%负载下行补偿量
60
M335
8
load%upSw50
50%负载上行补偿量
70
M335
9
load%doSw80
80%负载下行补偿量
85
M335
10
load%upSw80
80%负载上行补偿量
90
M335
11
%Overbalance
平衡负载系数
45
M335
12
RunsourceSVT=0
命令源
1
M335
13
MaxDriveErrorB
B类故障最大允许次数
5
M335
14MaxOVERCURRENT过流故障最大允许次数
3
M335
15
StartKp
无称重启动力矩补偿
2000
M335
16
StartKi
无称重启动力矩补偿
200
M335
17VSabnormt(s)
V码故障时间
100M335
18NTSDPersent%强迫减速动作速度
97M335
19DDP
Time(S)
平层光电保护时间
20M335
20Distancecomp
距离比较
0
M335
21
Maxfdbkerror
电流传感器故障最大允许次
3
M3-3-1-S3-S6-S9-S80
DrvDeadtimeus
PW波M死区时间
4
M3-3-1-S3-S6-S9-S81
magneticerrDeg
磁场误差阀值
20
M3-3-1-S3-S6-S9-S82
Cnvfilter
电流滤波频率
1800
M3-3-1-S3-S6-S9-S83
Switchfrq(KHz)
载波频率
10M3-3-1-S3-S6-S9-S8
4Runtimehour
M3-3-1-S3-S6-S9-S85
Runtimeminutes
M3-3-1-S4-S6-S1-S50
Controlmethord
控制方式:
主机类型
3
M3-3-1-S4-S6-S1-S51
MAXDBDERR
DBD错误准许次数
1M3-3-1-S4-S6-S1-S5
2
Rotorposoffset
保留
0
M3-3-1-S4-S6-S1-S53
inductd0(mH)
Q轴饱和电流电感
13.00M3-3-1-S4-S6-S1-S5
4
inductq0(mH)
D轴饱和电流电感
13.00
M3-3-1-S4-S6-S1-S55
reserved
保留
0
M3-3-1-S4-S6-S1-S56
reserved
保留
0
M3-3-1-S4-S6-S1-S57
reserved
保留
0
M3-3-1-S4-S6-S1-S58
reserved
保留
0M3-3-1-S4-S6-S1-
S5
9reserved
保留
0M3-3-1-S4-S6-S1-S510
reserved
保留
0
M3-3-1-S4-S6-S1-S511
inductd(mH)
Q轴电感
8.00
M3-3-1-S4-S6-S1-S512
mutualresist
定子电阻
0.42
M3-3-1-S4-S6-S1-S513
inductq(mH)
D轴电感
8.00M3-3-1-S4-S6-S1-S5
14
RotorTime(s)
转子时间常数
0.28M3-3-1-S4-S6-S1-S51Noloadcurrent
空载电流值
11.0
M3-3-1-S7-S4-S1-S20
Drivesize
驱动器功率
7
M3-3-1-S7-S4-S1-S21
DrvRtdVolt(V)
驱动器额定电压
380
M3-3-1-S7-S4-S1-S22
DrvIlimit(A)
驱动器硬件极限电流
72M3-3-1-S7-S4-S1-S2
3ACLinefscaleV
输入电压系数
1.000M3-3-1-S7-S4-S1-S24Busfscale(V)
母线电压系数
1.000M3-3-1-S7-S4-S1-S25
CnvIlimit(A)
驱动器硬件极
限电流
72
M3-3-1-S7-S4-S1-S26
DClinkovt(V)
母线过电压值
780
M3-3-1-S7-S4-S1-S27
DClinkuv(V)
母线欠电压值
380
M3-3-1-S7-S4-S1-S28
ACLineInput(V)
输入额定电压
400M3-3-1-S7-S4-S1-S2
9Brakeunitwork
制动工作电压
0.69
M3-3-1-S7-S4-S1-S00DriveLimitPU驱动器电动转矩限制系数1.50
M3-3-1-S7-S4-S1-S01
REGLimitPU
驱动器制动转矩限制系数
1.50
M3-3-1-S7-S4-S1-S02
Demagnetic(%)
异步机弱磁系数
100
M3-3-1-S7-S4-S1-S03
Startfilter
编码器信号滤波系数
1800M3-3-1-S7-S4-S1-
S04Dooropenspeed提前开门速度
100M3-3-1-S7-S4-S1-S05Mtr
overload(s)
驱动抗过载时间
6
调整范围备注
2-60异步机2-10同步机20-60
0或1
根据编码器设定
0或1
1024或
1:
同步
2048
0:
异步
无效
调大可以减小启动时的抖动,但会增加电梯满载时蹲底
0-1000
的风险
0-1000
0或11:
检测0:
不检测
1.07版本后改为typeofmotor主机类型,富沃德主机
不建议更改
设0蓝光主机设1
无效
无效
无效
无效
无效
无效
0-300
不建议更改
0-300
不建议更改
0-1000
不建议更改
0-1000
不建议更改0-
1000
1-1.5
不建议更改
0或11:
检测0:
不检测
根据主机铭牌设定
根据主机铭牌设定
根据主机铭牌设定
根据主机铭牌设定
根据主机铭牌设定
根据电梯铭牌设定
根据主机铭牌设定
根据主机铭牌设定,改变扭矩的大小可以改变启动力矩
大小
0-1000
0-200停车时抖动可以增大该值
0-1500
100-400启动溜车时增大该值
2-32
从1开始计算
0-2000
根据电梯铭牌设定0-
10000-10000-10000-1000
0-1000
0-1000
0-640
0-50010-
500
10-40改变该值可以改变停车时的速度
0-10010-
1000
10-1500
0-10000-300
100-1000
1-100
1-4
0或1
冲过平层减小该值,不到平层增大该值
冲过平层减小该值,不到平层增大该值
0或1
1:
无称重0:
有称重
不建议更改
不建议更改
不建议更改
不建议更改
不建议更改
不建议更改
不建议更改
不建议更改
不建议更改
不建议更改
不建议更改
0或1
0-10
不建议更改
0-10
不建议更改
0-5000
启动溜车时增大该值,过猛时减小该值
0-500
启动溜车时增大该值,过猛时减小该值0-
45
不建议更改0-200
不建议
更改0-45
不建议更改0-99
不建议更改
0-5
不建议更改
3-6
1.07版本后改为H-speedfrq(HZ)电梯高速段载波频率
0-40
500-2000
1.08版本后改为poserrlim(mm)
增大该值可以减小主机噪音,减小该值可以减小电梯加速、
2-12
减速阶段的抖动
0-33:
同步机1:
异步机0:
手动控制
0-10不建议更改
1-30
调整电感在值可以改善主机噪音和抖动
1-30
调整电感在值可以改善主机噪音和抖动
1-30
调整电感在值可以改善主机噪音和抖动
0-10
根据主机设定
1-30
调整电感在值可以改善主机噪音和抖动
0-1
异步机该值有用,调整该值可以改变电梯运行中的电流大小
0-50
异步机该值有用,调整该值可以改变电梯运行中的电流大小
5-115:
7.5KW7:
15KW8:
18.5KW9:
22KW10:
30KW11:
37KW
不建议更改
不建议更改
不建议更改
如果服务器显示电压值比实际值高,应该调小该值。
不建议更改
不建议更改
不建议更改
不建议更改
不建议更改
0-2.5不建议更改
0-2.5
不建议更改
0-200
不建议更改
0-5000
不建议更改
0-
300
不建议更改
0-
40
不建议更改
 升级会员
升级会员 