自动控制原理的工程案例.docx
《自动控制原理的工程案例.docx》由会员分享,可在线阅读,更多相关《自动控制原理的工程案例.docx(22页珍藏版)》请在冰豆网上搜索。
自动控制原理的工程案例
第一章绪论
原书中1.2节中已经有几个比较好的例子。
第二章控制系统的数学模型
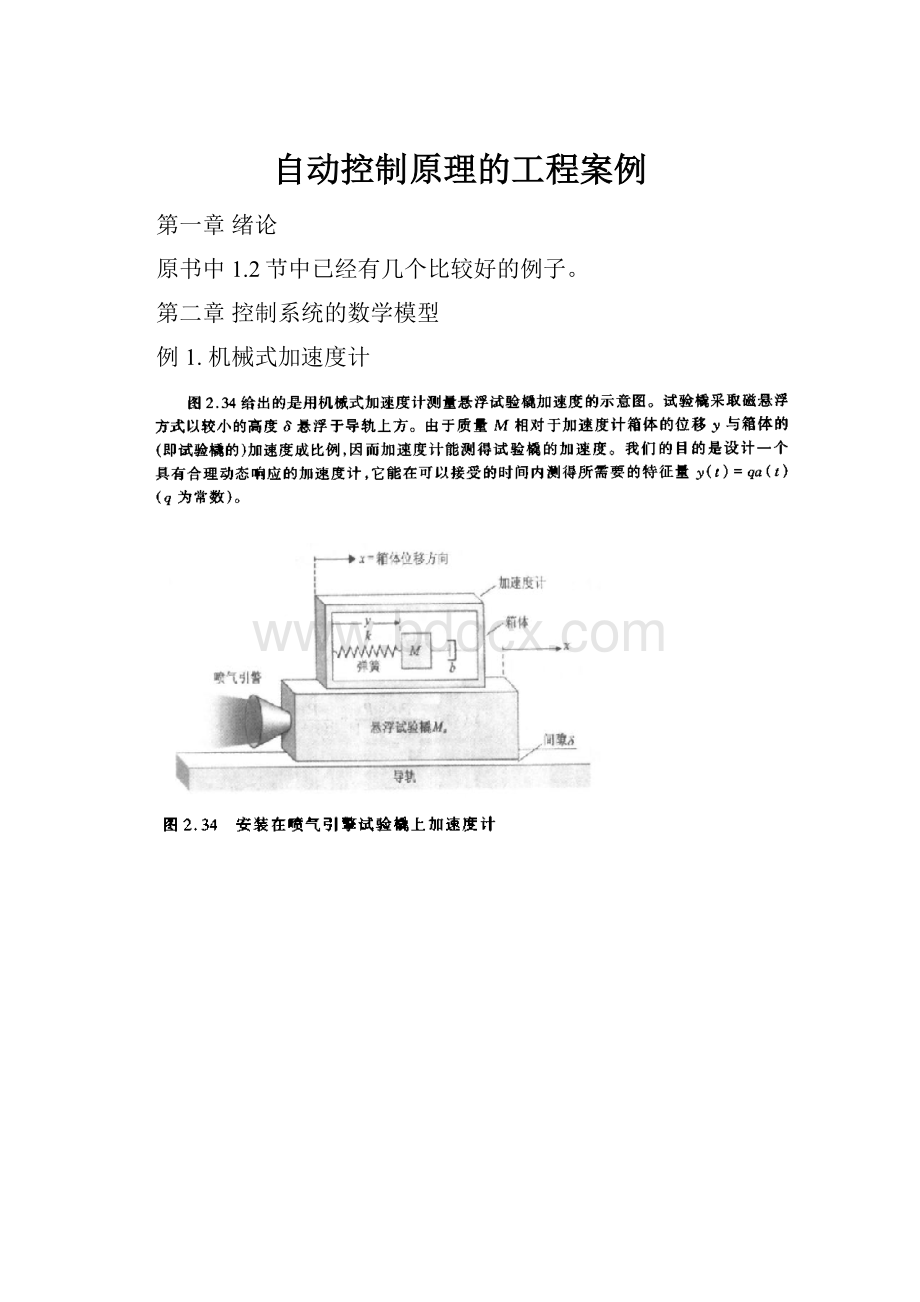
例1.机械式加速度计
例2.低通滤波器设计
例3.磁盘驱动读取系统
第三章线性系统的时域分析
例1哈勃太空望远镜驱动系统(时域性能指标和稳态误差指标给定下的案例设计)
例2火星漫游车转向控制(Routh判据应用案例)
图4.24所示的是以太阳能作动力的“逗留者号”火星漫游车。
第四章根轨迹法
例1激光操纵控制系统
例2机器人控制系统设计
现在又K1和K2两个参数可调。
首先取K2的取值范围为[5,10],以保证新增的开环零点s=-1/K2配置在原点附近。
当K2=5而K1变化时,得到个根轨迹如图7.36所示。
当K1=0.8,K2=5时
极点
零点后的根轨迹
第五章线性系统的频域分析法
例1遥控侦查车
能满足设计要求,我们就需要用后面学到的校正技术对系统进行校正,进一步改变对数幅相曲线的形状。
第六章控制系统综合与设计
例1转子绕线机控制系统
例2X-Y绘图仪
的取值,使系统主导极点对应的阻尼系数变成0.707,阶跃响应的超调量仅为5%,我们应将增益K的取值调整为472000。
这样我们就可得到一个I型系统,它的阶跃响应的稳态误
..
.
 升级会员
升级会员 