simpack(SIMAT控制总结).doc
《simpack(SIMAT控制总结).doc》由会员分享,可在线阅读,更多相关《simpack(SIMAT控制总结).doc(7页珍藏版)》请在冰豆网上搜索。
SIMAT联合仿真流程控制
控制实施过程
1.首先在MATLAB/simulink中建立控制系统当然控制系统是根据自己实际情况建立的。
2.打开SIMAPCK模型将要做仿真的机械模型调到出来。
3.定义Simpack模型的输入和输出。
这个是我们联合仿真中最为关键的一步具体分为两大步
3.1定义Simpack模型的输入U(t)
从matlab中输入的力元作为主动控制力是我们的重点。
首先在机械系统中定义好机械系统的外部输入一般为力U(T)开头,从中定义
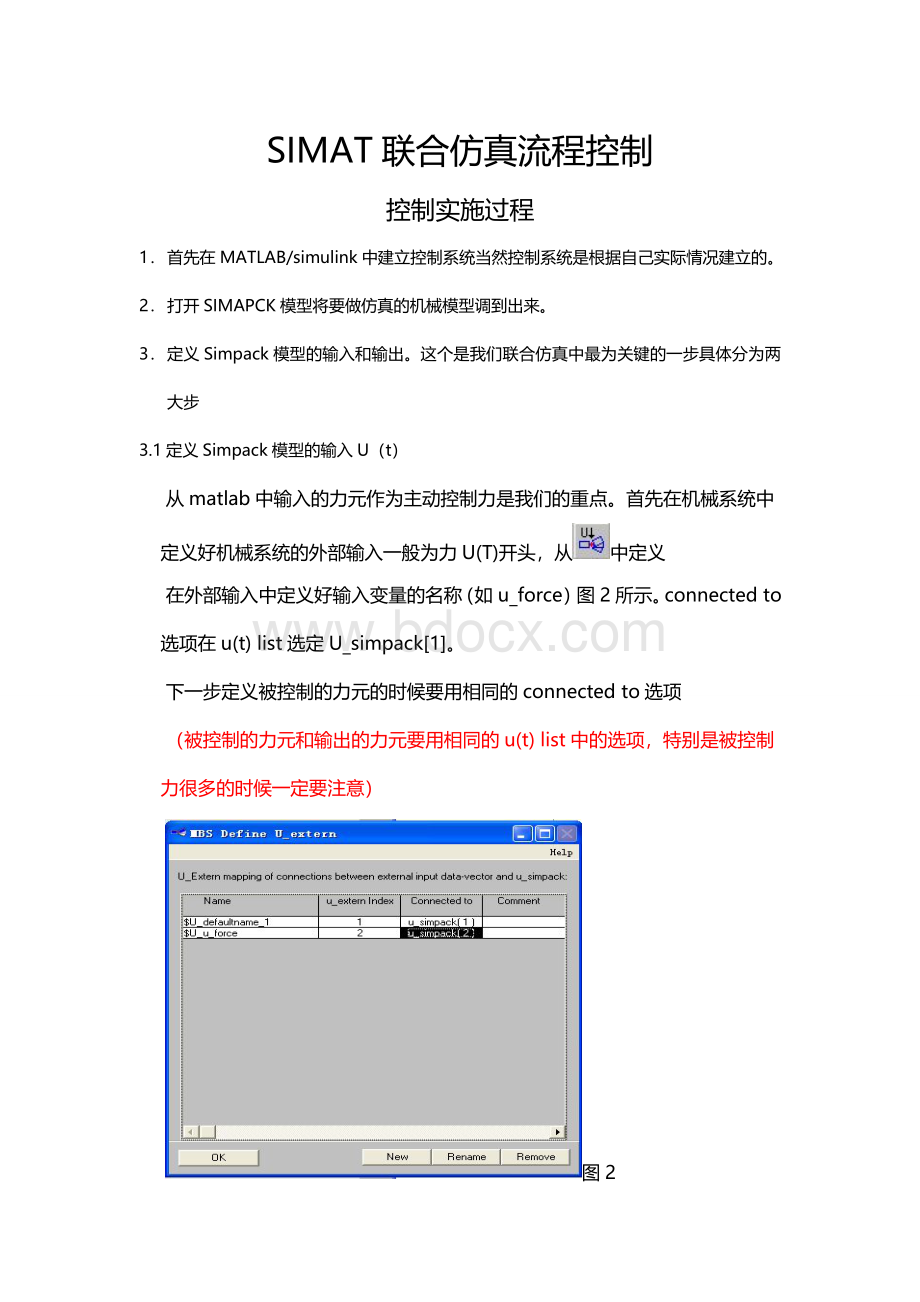
在外部输入中定义好输入变量的名称(如u_force)图2所示。
connectedto选项在u(t)list选定U_simpack[1]。
下一步定义被控制的力元的时候要用相同的connectedto选项
(被控制的力元和输出的力元要用相同的u(t)list中的选项,特别是被控制力很多的时候一定要注意)
图2
接着在中设置被控制力元,出现图4内容。
图4
FORCETYPE选择:
93:
Force/Torquebyu(t)cmp
94:
Force/Torquebyu(t)PtP
此处参数选择的应该是u_force对应的U_simpack[1]
3.2Simpack模型输出定义。
在定义好输入模型后,紧接着该设置输出变量,点击,这个里面我们直接设置Simpack输出,即出现图5可此时里面没有输出变量此时我们
图5
点击NEW,建立输出变量。
需要在里面定义自己所要的参数,如图6所示
图6
ElementType中选择输出的参数类型,Element中选择输出的参数等进行相关设置。
点击OK,这样模型输入输出定义完全。
4.设置MATLAB的工作路径
(注意:
在目录F:
\SIMPACKv8.8\s_8800\run\interfaces\simat下面包含了目前版本Simpack所支持的Matlab版本号,选择自己使用的Matlab版本)
设置方法为:
在MATLAB软件主窗口打开File-SetPath-AddFolder,在SIMPACK软件安装目录下找到对应的ATLAB软件版本的win32文件夹(文件夹内一般包含simat.mdl和simat_XXXX_XXXX.dll两个文件),添加路径如F:
\SIMPACKv8.8\s_8800\run\interfaces\simat\r14p3\win32,如图7所示;
图7添加路径
5.打开SIMPACK软件SIMPACKCommandShell(MSYS)(桌面上的图标这是个SIMPACK命令窗口)。
等待命令行出现输入:
cmd_server.exe20000(exe和20000之间有空格)。
若出现
[cmd]Creatingsocketatport20000.
[cmd]Commandserverreadyandwaitingforclienttoconnect.
则说明,连接成功;
这个端口的设计很重要必须先设置端口。
设置好机械模型端口否则会失败
6.在MATLAB软件主窗口输入simat,回车,出现图8所示Simpack动力学封装模型。
图8SIMAT中的SIMPACK软件动力学封装模型
7.将生成的simat动力学封转模型拖到SIMULINK模型中,(关闭simat注意不要保存simat)。
如图9所示。
(一定要注意MATLAB中的提示他会自动提示端口的数量)
图9组合在一起的控制模型
8.双击图9中SIMPACK动力学模型封装块,如图10所示,把采样时间周期改为0.001,TCP-Portofserverprocess(Default=20000)下面输入20000(注意:
此处的端口号一定要与第5步中命令中的定义的端口号一致),
钩选AutostartforSIMPACKCo-Simulation,把要仿真的SIMPACK软件动力学模型的SYS文件的目录输入,如
F:
\VEHICLE\main_model\123.sys
图10修改联合仿真窗内参数
9.在SIMULINK窗口中,打开Simulation-ConfigurationParameter,在出现窗口中选Solver。
定义仿真的起始和终止时间。
求解选项中,选择为固定步长,求解器任选,固定步长必须设为0.001,如图11所示;
图6仿真参数设置
10.点击图9中的黑色三角形(Simulink的开始按钮),开始仿真计算,结束后一定在SIMPACK软件中点击测量,进行计算结果输出。
11.完毕后,在SIMPACK软件的后处理中处理/output中生成的模型数据文件.izu和输入SIMPACK的矢量文件.uex。
最好在SIMPACK模型窗口(小窗口)选择caculation-measurement-perform进行数据处理。
生成的文件为.sbr文件存在于output中。
不是在模型文件中。
处理完后接下来的任务就是处理曲线了help文件中有相关帮助;注意上面提到的方法只是联合仿真中的一种;在SIMPACKhelp中还给予了另一种联合仿真方法。
上述方法SIMPACK是自动仿真的选择步骤,若是选择手动开始那么设置就是另一回事了具体看help.
感谢上海交通大学dean徐的大力帮助!
!
谢谢!
 升级会员
升级会员 