机电一体化技术实验报告演示模板doc.docx
《机电一体化技术实验报告演示模板doc.docx》由会员分享,可在线阅读,更多相关《机电一体化技术实验报告演示模板doc.docx(17页珍藏版)》请在冰豆网上搜索。
机电一体化技术实验报告演示模板doc
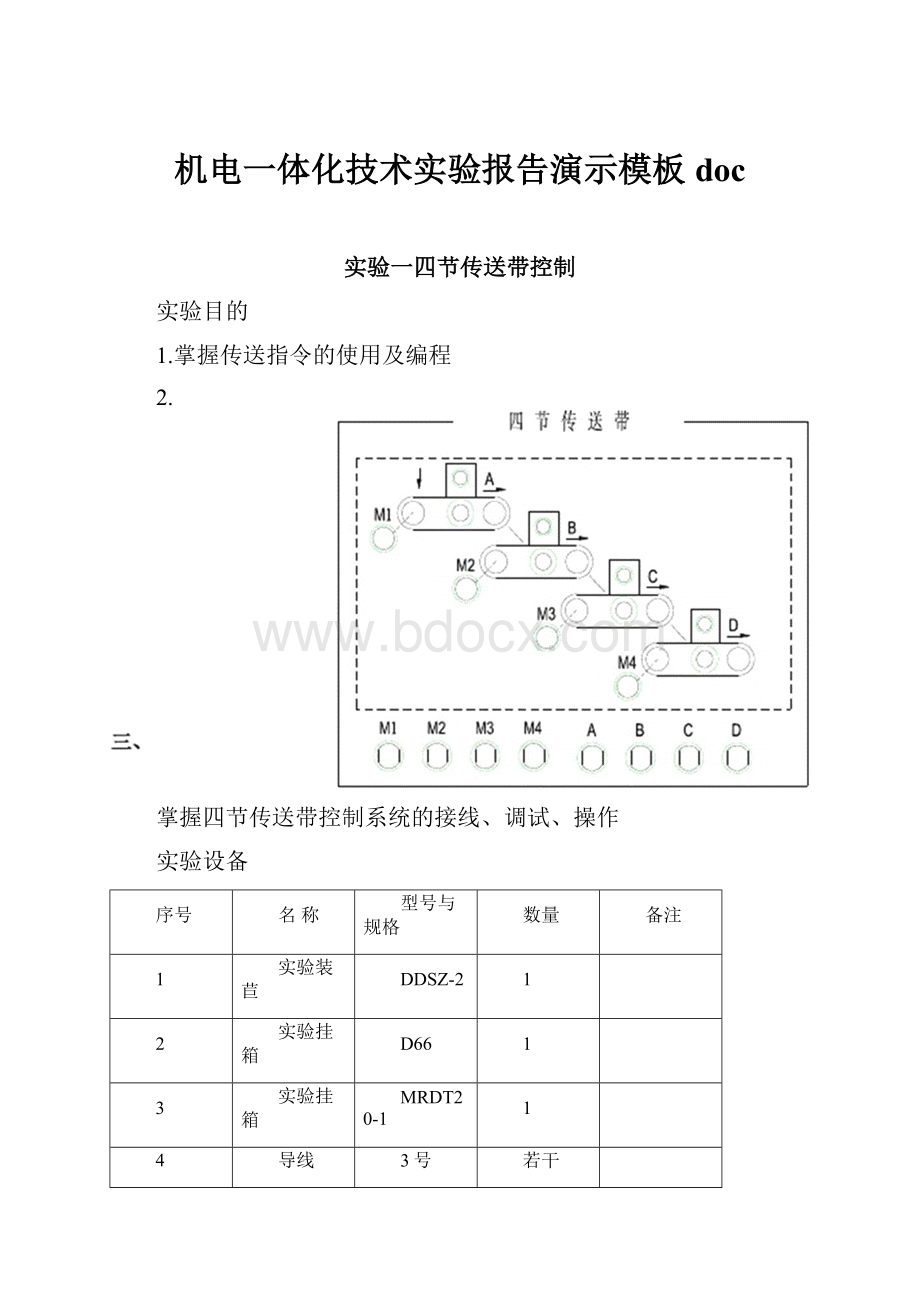
实验一四节传送带控制
实验目的
1.掌握传送指令的使用及编程
2.
掌握四节传送带控制系统的接线、调试、操作
实验设备
序号
名称
型号与规格
数量
备注
1
实验装苣
DDSZ-2
1
2
实验挂箱
D66
1
3
实验挂箱
MRDT20-1
1
4
导线
3号
若干
0
通讯编程电缆
SC-09
1
三菱
6
实验指导书
DDSZ-2
1
7
计算机(带编程软件)
1
自备
面板图
四、控制要求
1.总体控制要求:
如而板图所示,系统由传动电机血、M2、M3、M4,故障设置开关A、B、C、D组成,完成物料的运送、故障停止等功能。
2.闭合“启动”开关,首先启动最末一条传送带(电机M4),每经过1秒延时,依次启动一条传送带(电机M3、M2、Ml).
3.当某条传送带发生故障时,该传送带及苴前而的传送带立即停止,而该传送带以后的待运完货物后方可停止。
例如M2存在故障,则Ml、M2立即停,经过1秒延时后,M3停,再过1秒,M4停。
4.排岀故障,打开“启动”开关,系统重新启动。
5.关闭“启动”开关,先停止最前一条传送带(电机Ml),待料运送完毕后再依次停止M2、M3及M4电机。
五、功能指令使用及程序流程图
1.传送指令使用
Im
M|[KOVDOD10
X0000为ON时,将源内容向目标内容传送,X0000为OFF时,数据不变化。
2.程序流程图
启动
顺序启动
顺序停止故障停止
六.端口分配及接线圏
1.端口分配及功能表
序号
PLC地址(PLC端子)
电气符号(面板端
子)
功能说明
1
X00
SD
启动(SD)
2
X01
A
传送带A故障模拟
3
X02
B
传送带B故障模拟
4
X03
C
传送带C故障模拟
5
X01
D
传送带D故障模拟
6
Y00
Ml
电机Ml
7
Y01
M2
电机M2
8
Y02
M3
电机M3
9
Y03
M4
电机M4
10
主机C0队而板COM接电源GND
电源地端
11
主机COMO、C0M1.COM2.COM3.COM4.COM3.接电源GND
电源地端
12
而板V+接电源+24V
电源正端
2.PLC外部接线图
七、操作步骤
1.检査实验设备中器材及调试程序。
2.按照I/O端口分配表或接线图完成PLC与实验模块之间的接线,认真检査,确保正确无误。
3.打开示例程序或用户自己编写的控制程序,进行编译,有错误时根据提示信息修改,直至无误,用SC-09通讯编程电缆连接计算机串口与PLC通讯口,打开PLC主机电源开关,下载程序至PLC中,下载完毕后将PLC的“RUN/STOP”开关拨至“RUN”状态。
4.打开“启动”开关后,系统进入自动运行状态,调试四节传送带控制程序并观察四节传送带的工作状态。
5.将A、B、C、D开关中的任意一个打开,模拟传送带发生故障,观察电动机H1、M2、M3、M4的工作状态。
6.关闭“启动”按钮,系统停止工作
八、实验总结
1.总结移位寄传器指令的使用方法。
2.总结记录PLC与外部设备的接线过程及注意事项。
实验二数码显示控制
实验目的
1.掌握译码指令的使用及编程方法
2.掌握LED数码显示控制系统的接线、调试、操作方法
实验设备
序号
名
称
型号与规格
数量
备注
1.
可编程控制器实验装置
DDSZ-2
1
2.
实验挂箱
D67
1
3.
实验挂箱
MRDT20-1
1
4.
实验导线
3号
若干
5.
SC-09通讯电缆
1
三菱
6・
计算机
1
自备
3.功能指令使用及程序流程图
1.触点比较指令使用
o|[=DOKI];7000
指令描述:
对源数据内容进行BIN比较,对其结果执行后段的运算:
如上所示,当DO中的数据“等于”常数K1时,则Y0输出状态
2.程序流程图
四.端口分配及接线图
1.I/O端口分配功能表
序号
PLC地址(PLC端子)
电气符号(面板端子)
功能说明
X00
SD
启动/停止
¥00
A
Y01
B
Y02
C
Y03
D
Y01
E
¥05
F
¥06
G
Y07
H
主机COHO.C0M1、COM2等接电源GND
电源端
五、操作步骤
1.按控制接线图连接控制回路:
2.将编译无误的控制程序下载至PLC中,并将模式选择开关拨至RUN状态;
3.分别拨动启动开关K0,观察并记录LED数码管显示状态:
4・尝试编译新的控制程序,实现不同于示例程序的控制效果。
6.实验总结
1.尝试分析整套系统的工作过程;
2.尝试用其他不同于示例程序所用的指令编译新程序,实现新的控制过程。
实验三机械手控制
实验目的
机械T
序号
名称
型号与规格
数量
备注
1
实验装巻
DDSZ-2
1
2
实验挂箱
D66
1
3
实验挂箱
MRDT20-1
1
4
导线
3号
若干
L
0
通讯编程电缆
SC-09
1
三菱
6
实验指导书
DDSZ-2
1
7
计算机(带编程软件)
1
自备
1•掌握机械手控制系统的接线、调试、操作
二、实验设备
面板图
四、控制要求
1.总体控制要求:
如而板图所示,工件在A处被机械手抓取并放到B处。
2.机械手回到初始状态,SQXSQ2二1,SQ3二SQ1二0,原位指示灯HL点亮,按F“SB1”启动开关,下降指示灯YV1点亮,机械手下降,(SQ2二0)下降到A处后(SQ1二1)夹紧工件,夹紧指示灯YV2点亮。
3.夹紧工件后,机械手上升(SQ1二0),上升指示灯YV3点亮,上升到位后(SQ2二1),机械手右移(SQ4=0),右移指示灯YV4点亮。
4.机械手右移到位后(SQ3二1)下降指示灯YV1点亮,机械手下降。
5・机械手下降到位后(SQ1二1)夹紧指示灯YV2熄灭,机械手放松。
6.机械手放松后上升,上升指示灯YV3点亮。
7.机械手上升到位(SQ2二1)后左移,左移指示灯YV5点亮。
8.机械手回到原点后再次运行。
5.程序流程图
6.端口分配及接线图
1•端口分配及功能表
序号
PLC地址(PLC端子)
电气符号(面板端子)
功能说明
1
X00
SB1
启动开关
2
X01
SQ1
下限位开关
3
X02
SQ2
上限位开关
4
X03
SQ3
右限位开关
5
X04
SQ1
左限位开关
6
Y00
YV1
下降指示灯
7
Y01
YV2
夹紧指示灯
8
Y02
YV3
上升指示灯
9
Y03
YV4
右移指示灯
10
Y04
YV5
左移指示灯
11
Y05
HL
原位指示灯
12
主机COMO.COM1.COM2接电源GND
电源地端
2.PLC外部接线图
七、操作步骤
1.检査实验设备中器材及调试程序。
1.按照I/O端口分配表或接线图完成PLC与实验模块之间的接线,认真检查,确保正确无误。
2.打开示例程序或用户自己编写的控制程序,进行编译,有错误时根据提示信息修改,直至无误,用SC-09通讯编程电缆连接计算机串口与PLC通讯口,打开PLC主机电源开关,下载程序至PLC中,下载完毕后将PLC的“RUN/STOP”开关拨至“RUN”状态。
3.将左限位开关SQ4、右限位开关SQ3打向左、上限位开关SQ2、下限位开关SQ1打向上,机械手回到初始状态,原位指示灯HL点亮。
4.打上“SB1”启动开关,下降指示灯YV1点亮,模拟机械手下降,上限位开关SQ2打下,下降到A处后将下限位开关SQ1打下,开始夹紧工件,夹紧指示灯YV2点亮。
5.夹紧工件后,机械手上升,上升指示灯YV3点亮,将下限位开关SQ1打上,机械手上升到位后,上限位开关SQ2打上。
6.右移指示灯YV4点亮,机械手开始右移,左限位开关SQ4打向右。
7.机械手右移到位后,右限位开关SQ3打向右,下降指示灯YV1点亮,机械手下降,上限位开关SQ2打下。
8.机械手下降到位后,下限位开关SQ1打下,夹紧指示灯YV2熄火,机械手放松。
9.机械手放松后上升,上升指示灯YV3点亮,下限位开关SQ1打上,机械手上升到位后,上限位开关SQ2打上。
10.机械手上升到位后左移指示灯YV5点亮,右限位开关SQ3打向左。
11.机械手左移到位后,左限位开关SQ1打向左,机械手完成一个动作周期。
8.实验总结
1•总结记录PLC与外部设备的接线过程及注意事项。
实验四液体混合装置控制的模拟
实验目的
1.掌握上升沿/下降沿检出指令的使用及编程
2.掌握多种液体混合装置控制系统的接线、调试、操作
实验设备
序号
名称
型号与规格
数量
备注
1
实验装置
DDSZ-2
1
2
实验挂箱
D66
1
3
实验挂箱
MRDT20-1
1
4
导线
3号
若干
5
通讯编程电缆
SC-09
1
三菱
6
实验指导书
DDSZ-2
1
7
计算机(带编程软件)
1
自备
三、面板图
4.控制要求
1.总体控制要求:
如而板图所示,本装置为三种液体混合模拟装置,由液而传感器
SL1、SL2、SL3,液体A、B、C阀门与混合液阀门由电磁阀YV1、YV2、YV3、YV4,搅匀电机
M,加热器H,温度传感器T组成。
实现三种液体的混合,搅匀,加热等功能。
2.打开"启动”开关,装置投入运行时。
首先液体A、B、C阀门关闭,混合液阀门打开10秒将容器放空后关闭。
然后液体A阀门打开,液体A流入容器。
当液而到达SL3时,SL3接通,关闭液体A阀门,打开液体B阀门。
液而到达SL2时,关闭液体B阀门,打开液体C阀门。
液面到达SL1时,关闭液体C阀门。
3.搅匀电机开始搅匀、加热器开始加热。
当混合液体在6秒内达到设泄温度,加热器停止加热,搅匀电机工作6秒后停I匕搅动:
当混合液体加热6秒后还没有达到设定温度,加热器继续加热,当混合液达到设泄的温度时,加热器停止加热,搅匀电机停止工作。
4.搅匀结朿以后,混合液体阀门打开,开始放出混合液体。
当液而下降到SL3时,SL3由接通变为断开,再过2秒后,容器放空,混合液阀门关闭,开始下一周期。
5.关闭“启动”开关,在当前的混合液处理完毕后,停止操作。
五、功能指令使用及程序流程图
1.上升沿/下降沿检岀指令使用
XOOO
coo)
X001
HI⑹>
上升沿/下降沿检出指令,仅在指泄位软元件的上升沿或下降沿接通一个扫描周期。
2.程序流程图
六、端口分配及接线囹
1.端口分配及功能表
序号
PLC地址(PLC端子)
电气符号(面板端子)
功能说明
1
XOO
SD
启动(SD)
2
XO1
SL1
液位传感器SL1
3
X02
SL2
液位传感器SL2
4
X03
SL3
液位传感器SL3
5
X04
T
温度传感器T
6
¥00
YV1
进液阀门A
7
¥01
YV2
进液阀门B
8
¥02
YV3
进液阀门C
9
¥03
YV4
排液阀门
10
Y04
YKM
搅拌电机
11
Y05
H
加热器
12
主机C0\仁而板COH接电源GND
电源地端
13
主机COMO.COM]、COM2.COM3.COM4、COM5.接电源GND
电源地端
14
而板V+接电源+24V
电源正端
2.PLC外部接线图
GND
+24V
7.操作步骤
1.检査实验设备中器材及调试程序。
2.按照I/O端口分配表或接线图完成PLC与实验模块之间的接线,认真检査,确保正确无误。
3.打开示例程序或用户自己编写的控制程序,进行编译,有错误时根据提示信息修改,直至无误,用SC-09通讯编程电缆连接计算机串口与PLC通讯口,打开PLC主机电源开关,下载程序至PLC中,下载完毕后将PLC的“RUN/STOP"开关拨至“RUN”状态。
4・打开“启动”开关,SL1、SL2.SL3拨至OFF,观察液体混合阀门YV1、YV2、YV3、YV4的工作状态。
5.等待20S后,观察液体混合阀门YV1、YV2.YV3、YV4的工作状态有何变化,依次将SL1、SL2、SL3液而传感器扳至ON,观察系统各阀门、搅动电机YKM及加热器H的工作状态。
6.将测温传感器的开关打到ON,观察系统各阀门、搅动电机YKM及加热器H的工作状态。
7.关闭“启动”开关,系统停止工作。
八、实验总结
1.总结正/负跳变指令的使用方法。
2.总结记录PLC与外部设备的接线过程及注意事项。
 升级会员
升级会员 