LDO稳压器.docx
《LDO稳压器.docx》由会员分享,可在线阅读,更多相关《LDO稳压器.docx(15页珍藏版)》请在冰豆网上搜索。
LDO稳压器
LDO稳压器工作原理
随着便携式设备(电池供电)在过去十年间的快速增长,像原来的业界标准LM340和LM317这样的稳压器件已经无法满足新的需要。
这些稳压器使用NPN达林顿管,在本文中称其为NPN稳压器(NPNregulators)。
预期更高性能的稳压器件已经由新型的低压差(Low-dropout)稳压器(LDO)和准LDO稳压器(quasi-LDO)实现了。
(原文:
LinearRegulators:
TheoryofOperationandCompensation )
NPN稳压器(NPNregulators)
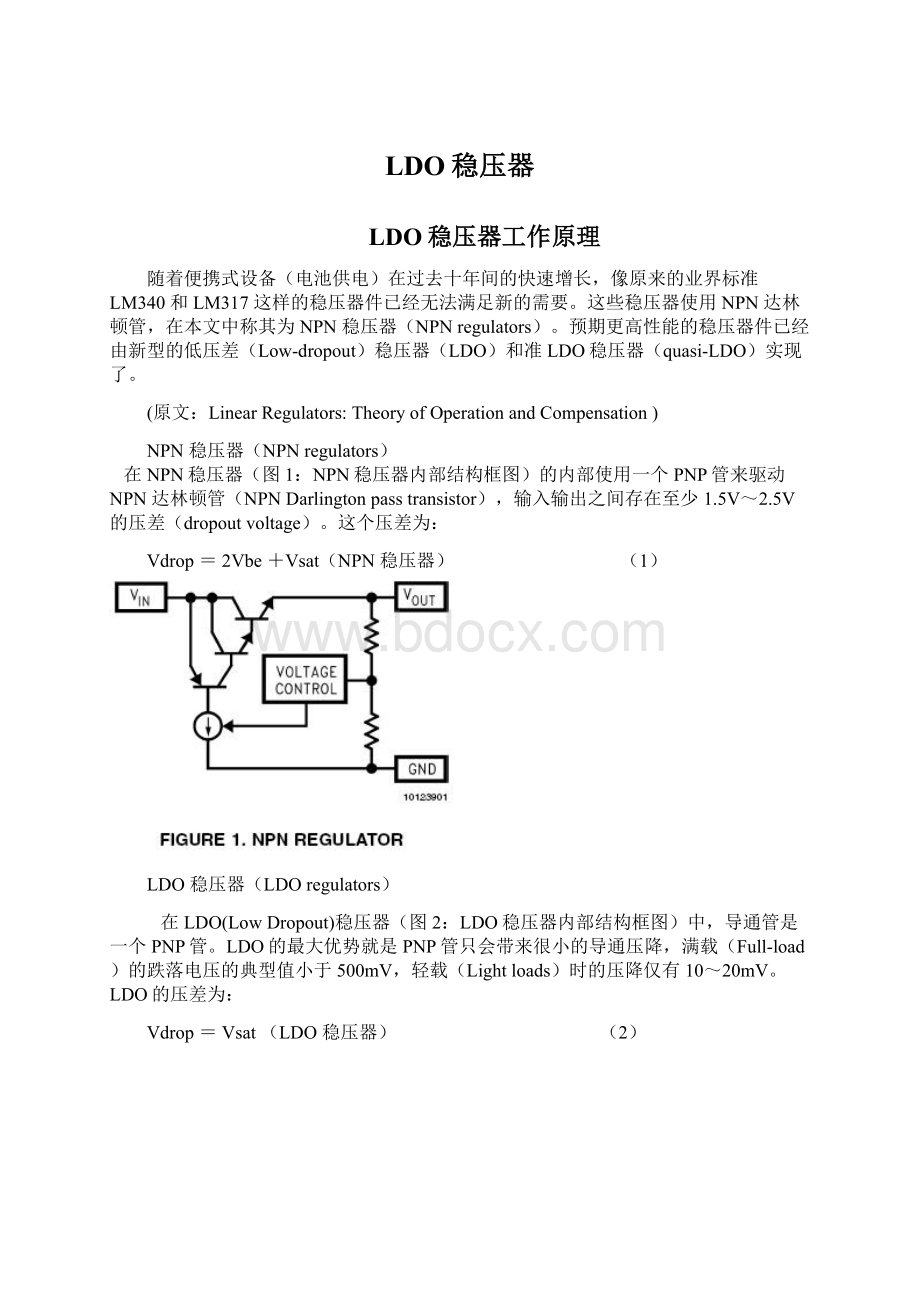
在NPN稳压器(图1:
NPN稳压器内部结构框图)的内部使用一个PNP管来驱动NPN达林顿管(NPNDarlingtonpasstransistor),输入输出之间存在至少1.5V~2.5V的压差(dropoutvoltage)。
这个压差为:
Vdrop=2Vbe+Vsat(NPN稳压器)
(1)
LDO稳压器(LDOregulators)
在LDO(LowDropout)稳压器(图2:
LDO稳压器内部结构框图)中,导通管是一个PNP管。
LDO的最大优势就是PNP管只会带来很小的导通压降,满载(Full-load)的跌落电压的典型值小于500mV,轻载(Lightloads)时的压降仅有10~20mV。
LDO的压差为:
Vdrop=Vsat(LDO稳压器)
(2)
准LDO稳压器(Quasi-LDOregulators)
准LDO(Quasi-LDO)稳压器(图3:
准LDO稳压器内部结构框图)已经广泛应用于某些场合,例如:
5V到3.3V转换器。
准LDO介于NPN稳压器和LDO稳压器之间而得名,导通管是由单个PNP管来驱动单个NPN管。
因此,它的跌落压降介于NPN稳压器和LDO之间:
Vdrop=Vbe+Vsat (3)
稳压器的工作原理(RegulatorOperation)
所有的稳压器,都利用了相同的技术实现输出电压的稳定(图4:
稳压器工作原理图)。
输出电压通过连接到误差放大器(ErrorAmplifier)反相输入端(InvertingInput)的分压电阻(ResistiveDivider)采样(Sampled),误差放大器的同相输入端(Non-invertingInput)连接到一个参考电压Vref。
参考电压由IC内部的带隙参考源(BandgapReference)产生。
误差放大器总是试图迫使其两端输入相等。
为此,它提供负载电流以保证输出电压稳定:
Vout=Vref(1+R1/R2) (4)
性能比较(PerformanceComparison)
NPN,LDO和准LDO在电性能参数上的最大区别是:
跌落电压(Dropout Voltage)和地脚电流(GroundPinCurrent)。
为了便于分析,我们定义地脚电流为Ignd(参见图4),并忽略了IC到地的小偏置电流。
那么,Ignd等于负载电流IL除以导通管的增益。
NPN稳压器中,达林顿管的增益很高(HighGain),所以它只需很小的电流来驱动负载电流IL。
这样它的地脚电流Ignd也会很低,一般只有几个mA。
准LDO也有较好的性能,如国半(NS)的LM1085能够输出3A的电流却只有10mA的地脚电流。
然而,LDO的地脚电流会比较高。
在满载时,PNP管的β值一般是15~20。
也就是说LDO的地脚电流一般达到负载电流的7%。
NPN稳压器的最大好处就是无条件的稳定,大多数器件不需额外的外部电容。
LDO在输出端最少需要一个外部电容以减少回路带宽(LoopBandwidth)及提供一些正相位转移(PositivePhaseShift)补偿。
准LDO一般也需要有输出电容,但容值要小于LDO的并且电容的ESR局限也要少些。
反馈及回路稳定性(FeedbackandLoopStability)
所有稳压器都使用反馈回路(FeedbackLoop)以保持输出电压的稳定。
反馈信号在通过回路后都会在增益和相位上有所改变,通过在单位增益(UnityGain,0dB)频率下的相位偏移总量来确定回路的稳定性。
波特图(BodePlots)
波特图(BodePlots)可用来确认回路的稳定性,回路的增益(LoopGain,单位:
dB)是频率(Frequency)的函数(图5:
典型的波特图)。
回路增益及其相关内容在下节介绍。
回路增益可以用网络分析仪(Network Analyzer)测量。
网络分析仪向反馈回路(Feedback Path)注入低电平的正弦波(Sine Wave),随着直流电压(DC)的不断升高,这些正弦波信号完成扫频,直到增益下降到0dB。
然后测量增益的响应(GainResponse)。
波特图是很方便的工具,它包含判断闭环系统(Closed-loopSystem)稳定性的所有必要信息。
包括下面几个关键参数:
环路增益(Loop Gain),相位裕度(PhaseMargin)和零点(Zeros)、极点(Poles)。
回路增益(LOOPGAIN)
闭环系统(Closed-loopSystem)有个特性称为回路增益(LoopGain)。
在稳压电路中,回路增益定义为反馈信号(FeedbackSignal)通过整个回路后的电压增益(VoltageGain)。
为了更好的解释这个概念,LDO的结构框图(图2)作如下修改(图6:
回路增益的测量方法)。
变压器(Transformer)用来将交流信号(ACSignal)注入(Inject)到“A”、“‘B”点间的反馈回路。
借助这个变压器,用小信号正弦波(Small-signalSineWave)来“调制”(modulate)反馈信号。
可以测量出A、B两点间的交流电压(ACVoltage),然后计算回路增益。
回路增益定义为两点电压的比(Ratio):
LoopGain=Va/Vb (5)
需要注意,从Vb点开始传输的信号,通过回路(Loop)时会出现相位偏移(PhaseShift),最终到达Va点。
相位偏移(PhaseShift)的多少决定了回路的稳定程度(Stability)。
反馈(FEEDBACK)
如前所述,所有的稳压器都采用反馈(Feedback)以使输出电压稳定。
输出电压是通过电阻分压器进行采样的(图6),并且该分压信号反馈到误差放大器的一个输入端,误差放大器的另一个输入端接参考电压,误差放大器将会调整输出到导通管(PassTransistor)的输出电流以保持直流电压(DCValtage)的稳定输出。
为了达到稳定的回路就必须使用负反馈(NegativeFeedback)。
负反馈,有时亦称为改变极性的反馈(degenerativefeedback),与源信号的极性相反(图7:
反馈信号的相位示意图)。
负反馈与源(Source)的极性相反,它总会阻止输出的任何变化。
也就是说,如果输出电压想要变高(或变低),负反馈回路总会阻止,强制其回到正常值。
正反馈(PositiveFeedback)是指当反馈信号与源信号有相同的极性时就发生的反馈。
此时,回路响应会与发生变化的方向一致。
显而易见不能达到输出的稳定,不能消除输出电压的改变,反而将变化趋势扩大了。
当然,不会有人在线性稳压器件中使用正反馈。
但是如果出现180°的相移,负反馈就成为正反馈了。
相位偏移(PHASESHIFT)
相位偏移就是反馈信号经过整个回路后出现的相位改变(PhaseChange)的总和(相对起始点)。
相位偏移,单位用度(Degrees)表示,通常使用网络分析仪(networkanalyzer)测量。
理想的负反馈信号与源信号相位差180°(如图8:
相位偏移示意图),因此它的起始点在-180°。
在图7中可以看到这180°的偏置,也就是波型差半周。
可以看到,从-180°开始,增加180°的相移,信号相位回到零度,就会使反馈信号与源信号的相位相同,从而使回路不稳定。
相位裕度(PHASEMARGIN)
相位裕度(PhaseMargin,单位:
度),定义为频率的回路增益等0dB(单位增益,UnityGain)时,反馈信号总的相位偏移与-180°的差。
一个稳定的回路一般需要20°的相位裕度。
相位偏移和相位裕度可以通过波特图中的零、极点计算获得。
极点(POLES)
极点(Pole)定义为增益曲线(Gaincurve)中斜度(Slope)为-20dB/十倍频程的点(图9:
波特图中的极点)。
每添加一个极点,斜度增加20dB/十倍频程。
增加n个极点,n×(-20dB/十倍频程)。
每个极点表示的相位偏移都与频率相关,相移从0到-90°(增加极点就增加相移)。
最重要的一点是几乎所有由极点(或零点)引起的相移都是在十倍频程范围内。
注意:
一个极点只能增加-90°的相移,所以最少需要两个极点来到达-180°(不稳定点)。
零点(ZEROS)
零点(Zero)定义为在增益曲线中斜度为+20dB/十倍频程的点(如图10:
波特图中的零点)。
零点产生的相移为0到+90°,在曲线上有+45°角的转变。
必须清楚零点就是“反极点”(Anti-pole),它在增益和相位上的效果与极点恰恰相反。
这也就是为什么要在LDO稳压器的回路中添加零点的原因,零点可以抵消极点。
波特图分析
用包含三个极点和一个零点的波特图(图11:
波特图)来分析增益和相位裕度。
假设直流增益(DCgain)为80dB,第一个极点(pole)发生在100Hz处。
在此频率,增益曲线的斜度变为-20dB/十倍频程。
1kHz处的零点使斜度变为0dB/十倍频程,到10kHz处斜度又变成-20dB/十倍频程。
在100kHz处的第三个也是最后一个极点将斜度最终变为-40dB/十倍频程。
图11中可看到单位增益点(UnityGainCrossover,0dB)的交点频率(CrossoverFrequency)是1MHz。
0dB频率有时也称为回路带宽(LoopBandwidth)。
相位偏移图表示了零、极点的不同分布对反馈信号的影响。
为了产生这个图,就要根据分布的零点、极点计算相移的总和。
在任意频率(f)上的极点相移,可以通过下式计算获得:
极点相移=-arctan(f/fp) (6)
在任意频率(f)上的零点相移,可以通过下式计算获得:
零点相移=-arctan(f/fz) (7)
此回路稳定吗?
为了回答这个问题,我们根本无需复杂的计算,只需要知道0dB时的相移(此例中是1MHz)。
前两个极点和第一个零点分布使相位从-180°变到+90°,最终导致网络相位转变到-90°。
最后一个极点在十倍频程中出现了0dB点。
代入零点相移公式,可以计算出该极点产生了-84°的相移(在1MHz时)。
加上原来的-90°相移,全部的相移是-174°(也就是说相位裕度是6°)。
由此得
 升级会员
升级会员 