转速反馈单闭环直流调速系统仿真.docx
《转速反馈单闭环直流调速系统仿真.docx》由会员分享,可在线阅读,更多相关《转速反馈单闭环直流调速系统仿真.docx(15页珍藏版)》请在冰豆网上搜索。
转速反馈单闭环直流调速系统仿真
实验一、转速反馈单闭环直流调速系统仿真一、实验内容:
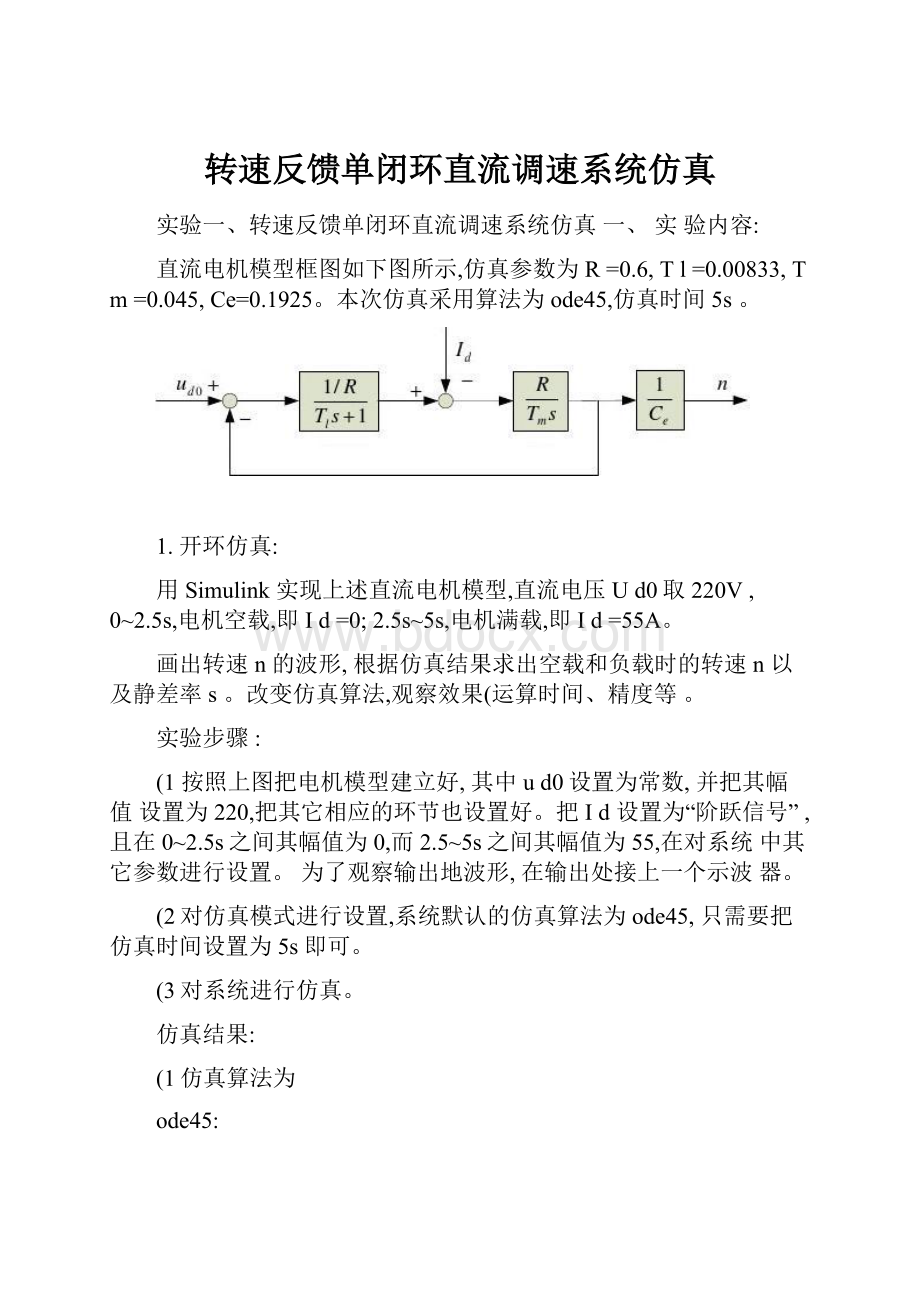
直流电机模型框图如下图所示,仿真参数为R=0.6,Tl=0.00833,Tm=0.045,Ce=0.1925。
本次仿真采用算法为ode45,仿真时间5s。
1.开环仿真:
用Simulink实现上述直流电机模型,直流电压Ud0取220V,0~2.5s,电机空载,即Id=0;2.5s~5s,电机满载,即Id=55A。
画出转速n的波形,根据仿真结果求出空载和负载时的转速n以及静差率s。
改变仿真算法,观察效果(运算时间、精度等。
实验步骤:
(1按照上图把电机模型建立好,其中ud0设置为常数,并把其幅值设置为220,把其它相应的环节也设置好。
把Id设置为“阶跃信号”,且在0~2.5s之间其幅值为0,而2.5~5s之间其幅值为55,在对系统中其它参数进行设置。
为了观察输出地波形,在输出处接上一个示波器。
(2对仿真模式进行设置,系统默认的仿真算法为ode45,只需要把仿真时间设置为5s即可。
(3对系统进行仿真。
仿真结果:
(1仿真算法为
ode45:
图1
上图即为电机转速的仿真结果图,同图上我们可以看出来分为了两个阶段,其中第一个阶段(0~2.5s为空载转速,第二阶段(2.5~5s为满载转速。
空载转速为1142n/min。
在2.5s时加入了负载,通过仿真结果我们可以看出来,负载转速为972n/min。
这可以看出来在加入负载之后,电机的转速开始下降。
根据电机转差率的公式s=(n0-n/n0=(1142-972/1142=0.149。
转差率还是比较小的,说明该电机效率比较高。
通过观察该仿真的时间,其运算时间为T=9.134*10^-7s。
(2仿真算法为ode23:
仿真结果图如图2所示,由图我们可以看出来,结果基本上和计算方法为ode45的结果一样,但是运算时间却不一样,该算法的运算时间为T=3.636*10^-7s。
运算时间比ode45的时间短。
但是ode23的计算精度不太高,所以ode23一般用于计算精度不太高的场合。
在求解的不太难的时候ode23可能比ode45有效。
图2(3仿真算法为ode15s:
仿真结果如上图所示,仿真结果值基本上与上述两种仿真算法的结果相同,只是在运算时间和仿真精度不同,该仿真算法的运算时间为T=5.387*10^-6s。
由此可以看出来其运算时间比上述两种运算方法的时间都要长。
ode15s是一种基于数字微分公式的解法器(NDFs。
也是一种多步解法器。
适用于刚性系统,当用户估计要解决的问题是比较困难的,或者不能使用ode45,或者即使使用效果也不好,就可以用ode15s。
由于其是一种多不解法器,所以运算时间相对长一点。
这种运算方法的精度中等,当ode45时效时可以尝试用这种运算方法。
(4仿真算法为
ode113
仿真结果也大致和上面几种运算方法的结果一致。
ode113是一种阶数可变的解法器,它在误差容许要求严格的情况下通常比ode45有效。
ode113是一种多步解法器,也就是在计算当前时刻输出时,它需要以前多个时刻的解。
运算时间为T=3.593*10^-8s。
运算时间比上述三种方法的运算时间都要短。
这种计算方法使用于高低精度的运算。
由此
我们可以看出来,针对matlab中不同的计算方法,其结果基本上相差不多,但是其计算精度却是不相同的,此时我们就可以根据我们所需要的精度选择我们需要的运算方法。
在某些场合可能有点运算方法会失效,此时就只能选择另外的计算的方法。
在该实验中发现了当使用计算方法为discrete,该计算结果是发散的,此时这种计算方法明显已经失效了,因此我们需要选择其它算法。
因此我们可以归纳出matlab中常用的几种算法的相关信息:
我们可以根据我们自己的需要来选择相应的计算方法。
2.闭环仿真:
在上述仿真基础上,添加转速闭环控制器,转速指令为1130rpm,
0~2.5s,电机空载,即Id=0;2.5s~5s,电机满载,即Id=55A。
(1控制器为比例环节:
试取不同kp值,画出转速波形,求稳态时n和s并进行比较。
闭环
在原来的基础上进行修改,此时输入量为一个转数的常数量,再加入一个控制环节和一个反馈环节,这样就能实现对速度的控制,可以得到我们希望的速度。
我们可以选择不同的Kp值,通过仿真结果来选择我们觉得最好的效果。
1当Kp=1000时仿真结果。
通过仿真结果我们可以看出来是一个发散系统,这明显不满足我们的要求,说明我们所选取的Kp太大,所以应该把它调小。
2当Kp=100时的仿真结果
由仿真结果可以看出来,在刚开始的时候文波比较大,并且超调量也比较大,在稳定时波动也是比较大的,在稳定时可以看出来基本上在1130n/min左右,基本上算是达到我们希望的结果。
3当Kp=50时的仿真结果
当Kp=50时,效果比100时好的多,且在稳定之后,波动也并不是太大。
但是在未稳定之前,超调和调节时间等都比较大,还是不能达
到要求。
还需要继续减小Kp的值。
此时输出的转数比价接近我们希望的转速。
4当Kp=10的仿真结果
效果虽然比上面的都好,但是开始的超调都比较大,所以还是达不到一个稳定系统的要求。
再继续调小Kp的值。
5当Kp=5时的仿真结果
通过放大观察,发现在开始是波动也比较大,并且超调也比较大,因此还是不能达到我们的要求,还需要把Kp值调小。
6当Kp=2.5时
当KP=2.5时,空载转速为1050n/min。
离我们所希望的转速不是太远,负载转速为1040n/min。
所以转差率s=0.009524,转差率比较小。
7当Kp=2时
由仿真结果图我们可以看出来基本上算是稳定,但是超调依然还是比较大,并且在稳定时,依然不能达到我们所希望的结果。
稳定时空载转速为1030n/min左右。
负载转速为1015n/min左右。
所以s=0.0146。
7当Kp=1.5时的仿真结果
根据上面的各种Kp的仿真结果我们可以看出来当Kp越小时,超调和调节时间等越小。
但是离我们跟定的输入值就越大,此时就需要并且当Kp越小时,其转差率也会随之增大,我们一般都是希望转差率尽量小一定,这样电机运转的效率高一点,所以根据综合各方面的因数,我们选择当Kp=2.5。
虽然此时的离我们所希望的输出还有一定的差值,但是相对比较好。
因此我们可以看出来只是用比例环节进行调节,依然还是不能达到我们所希望的要求。
因此下面用比例积分环节进行调节。
(2控制器为比例积分环节,设计恰当的kp和kI值,并与其它不同的kp和kI值比较,画出不同控制参数下的转速波形,比较静差率、超调量、响应时间和抗干扰性。
把原来的比例环节改为比例微分环节,其它地方保持不变。
然后选择适当的Kp和Ki进行仿真。
1选择Kp=10,Ki=2进行仿真
由仿真结果可知,空载转速为1100n/min,与我们希望转速比较相近。
峰值为1400n/min,峰值时间tp=0.16s,调节时间ts=0.6s。
因此
超调量为27.27%,负载转速为1100n/min。
因此转差率为0,与空载时的转速相同,只是在加入负载时有一个波动。
波动时间为0.3s左右,这个对电机来说应该是不太利的。
该控制环节使系统的的调节时间变得比较长,我们希望一个系统能够尽快达到稳定,因此调节时间应该尽量小一点。
并且超调量也比较大,这对电机的工作也不太利。
2选择Kp=5,Ki=2进行仿真:
由仿真结果可知,空载转速为1090n/min,这比我们所希望的转速更低,转速峰值为1169n/min,峰值时间为0.222s,调节时间为0.5s,超调量为(1169-1090/1090=7.25%,负载转速为1090n/min。
转差率为0,加入负载的波动时间依然为0.3s左右。
因此可以看出来当Kp减小时,超调量减小调节时间也有所减小,只是输出的转速与我们所希望相差更大。
从上面的结果我们可以看出来,如果我们希望输出结果尽量接近我们所希望的值,那么我们就应该把Kp调大,但是超调量会变大,并且调节时,间会相应的增加,这样对电机的要求也就越高,而如果把Kp调小,超调量和调节时间等会减小,但是离我们所希望值就越远,此时就应该根据我们的要求来选择相应的Kp和Ki。
3选择Kp=5,Ki=1进行仿真:
由仿真结果可知,空载转速为1090n/min,这与Kp相同为Ki=2的控制环节相同。
峰值转速为1368n/min,峰值时间为0.138s,调节时间为0.6s左右,这比Kp=5,Ki=2的调节时间要长。
超调量为25.5%。
同样比相同的Kp值,而Ki值不同的超调量大。
加入负载的调节时间也比原来大。
因此在相同条件下,我们应该选择Kp=5,Ki=2的控制环节。
4选择Kp=10,Ki=5进行仿真
由仿真结果可以看出来,空载转速为1108n/min,负载转速
1105n/min,转差率为0.0027,转差率比较小。
峰值转速为1145n/min,峰值时间为0.268s,调节时间为0.46s。
加入负载之后,其波动不是太大,只是在刚加入负载时,转速有所下降,然后又基本回到了原来的转速。
超调量为3.33%,超调量也相对较小。
且从波形我们可以看出来的稳定前,其波动并不是太大。
5Kp=15,
Ki=5
当增大Kp的值时,超调量有所增加,并且调节时间也有所增加,但是空载转速增加的并不是太大,因此我们还是不选择这个参数的控制环节。
6Kp=10,
Ki=10
由仿真结果可知,空载转速为1106n/min,负载转速为1105n/min,转差率为9.04*10^-4,在加入负载之后,对转速却基本上没有影响。
但是最终输出的转速与我们希望转速相差有点大。
没有超调,相同的Kp值,Ki值越大,则其超调量越小,调节时间增大到0.8s。
这是我们所不希望的。
抗干扰性比较好。
7Kp=20,
Ki=10
空载转速为1120n/min,离我们所希望的输出值比较相近,负载转速为1117n/min,因此转差率s=0.0027,转差率比较小。
峰值转速为1155n/min,峰值时间为0.268s,调节时间为0.46s,超调量为3.125%,超调量也相对较小。
通过以上仿真和分析我们可以知道,当Ki相同,Kp越大时,超调量越大,输出结果越接近于我们所希望的结果值,即被放大的倍数就越大。
当Kp相同时,超调量越小,且有的可能没有超调。
峰值转速也会相对小一点。
此时我们就需要根据具体的要求来选择相应参数来控制输出。
3.分析结合《自动控制系统》相关知识,对上述结果进行分析。
在开环仿真中,我们可以根据开环传递函数来进行求解输入,根据C(s=R(s*ф(s进行求解,不过此时的频域,我们需要转化到时域中进行求解,带入相应的时间进行求解。
在t=2.5s加入负载,而在自控中,相当于在此时加入一个扰动。
此时可以把输入看做两个输入,不过此时由于扰动相当于一个负的输入量,所以相对在没有扰动加入之前,其输出量减少了。
在闭环仿真中,相当于我们给定了一个参考量,通过闭环控制来实现输出与输入一致。
而在控制中,通常有比例控制环节、比例积分控制环节、比例微分控制环节和比例微分积分控制环节。
不同的控制环节有不同的作用。
比例环节的特点是输出不失真,不延迟,成比例地复现输入信号的变化。
在仿真过程中,通过不同的Kp可以看出来,其放大的效果是不一样的,总体上对输入信号有放大,但是由于在输入和反馈之间有个波动,把这个波动放大,这样使得在开始时,系统波动比较大,且调节时间也比较大。
P控制器实质上是一个具有可调增益的放大器。
在信号变换过程中,P控制器只改变信号的增益而不影响其相位。
在串联校正中,加大控制器增益Kp,可以提高系统的开环增益,减小系统稳态误差,从而提高系统的控制精度,但会降低系统的相对稳定性,甚至可能造成闭环系统不稳定。
因此,在系统校正设计中很少单独使用比例控制规律。
由仿真我们也可以看出来,当Kp为1000时,系统不稳定,而逐渐减小Kp值时,系统逐渐变得稳16
定,不过随着Kp的减小,增益也随之减小。
始终不能达到我们所希望的情况。
控制器为比例积分控制,积分环节可以提高系统的型别,有利于系统稳态性能的提高,但积分控制使系统增加了一个位于原点的开环极点,使信号产生90°的相角滞后,于系统的稳定性不利。
而加上比例环节的性质之后,就能改变整个控制的性质,能够达到我们所希望要求。
在串联校正时,控制器相当于在系统中增加了一个位于原PI点的开环极点,同时也增加了一个位于s左平面的开环零点。
位于原点的极点可以提高系统的型别,以消除或减小系统的稳态误差,改善系统的稳态性能;而增加的负实零点则用来减小系统的阻尼程度,缓和PI控制器极点对系统稳定性及动态过程产生的不利影响,只要积分时间足够大,控制器对系统稳定性的不利影响可大为减弱。
PI在控制工程中,控制器主要用来改善控制系统是的稳态性能。
PI通过以上的仿真结果我们可以看出来,在Kp和Ki保持一定的比例时,系统的性能都相对较好一点,并且系统的Ki越大,就相当于积分的时间越长一点,则系统的稳定性能越好。
且其抗干扰能力也比较强,但是当Kp比Ki大时,可能会导致系统不稳定,且调节时间也会相应的增加,因此我们应该通过适当改变Kp和Ki的值来调节系统的性能。
在只有比例环节时,为了达到输入量,我们不得不增大Kp的值,增大Kp的值,带来的后果是使系统变得不稳定,这样对于我们调节是不利的,而在加入积分环节之后,通过同时调节Kp和Ki的值可以达到一个很好的控制效果。
说明积分环节能够使系统达到一个稳定的17
效果,由于积分环节积分时间的影响,在加入负载(在自控中相当于一个干扰信号)之后,其输出虽然在加入瞬间有个干扰,但是很快输出基本上能够稳定跟上原来的输出,这样就增加了其抗干扰能力。
而在比例环节中,其抗干扰能力不强,且还会把干扰信号进行放大,这就很可能使系统变得不再稳定。
因此PI控制是比较常用的。
二、试验心得通过本实验对simulink仿真系统下很多模型有了进一步的了解。
同时通过对控制系统的仿真,进一步理解了上学期所学习的关于自控方面的知识。
本试验中用到了两个控制器来进行控制,不同的控制环节,对系统的输出结果有不同的影响。
上学期只是在理论上学习,但是通过本次的试验仿真,加深了对比例控制环节和比例积分控制有了很深的理解。
通过对simulink的不同算法的仿真,理解了不同算法之间的关系及运算时间和精度的概念。
对计算仿真技术有了进一步的了解,知道我们可以通过simulink来对电力电子中很多技术进行仿真,从而减少试验过程,来选择我们希望的电力电子器件,这样就能减少一些不必要的损耗。
18
 升级会员
升级会员 