二维转三维建模.docx
《二维转三维建模.docx》由会员分享,可在线阅读,更多相关《二维转三维建模.docx(11页珍藏版)》请在冰豆网上搜索。
二维转三维建模
用AutoCAD进行二维绘图,对具有机械制图基础的人来说,一般都比较容易掌握。
但对三维建模,特别是自学者,却总觉得不知从何下手。
有鉴于此,特撰本教程,以冀对初学者有所帮助。
本教程旨在介绍由三视图绘制三维实体图时,整个建模过程的步骤和方法。
一、分析三视图,确定主体建模的坐标平面
在拿到一个三视图后,首先要作的是分析零件的主体部分,或大多数形体的形状特征图是在哪个视图中。
从而确定画三维图的第一步――选择画三维图的第一个坐标面。
这一点很重要,初学者往往不作任何分析,一律用默认的俯视图平面作为建模的第一个绘图平面,结果将在后续建模中造成混乱。
看下面几例:
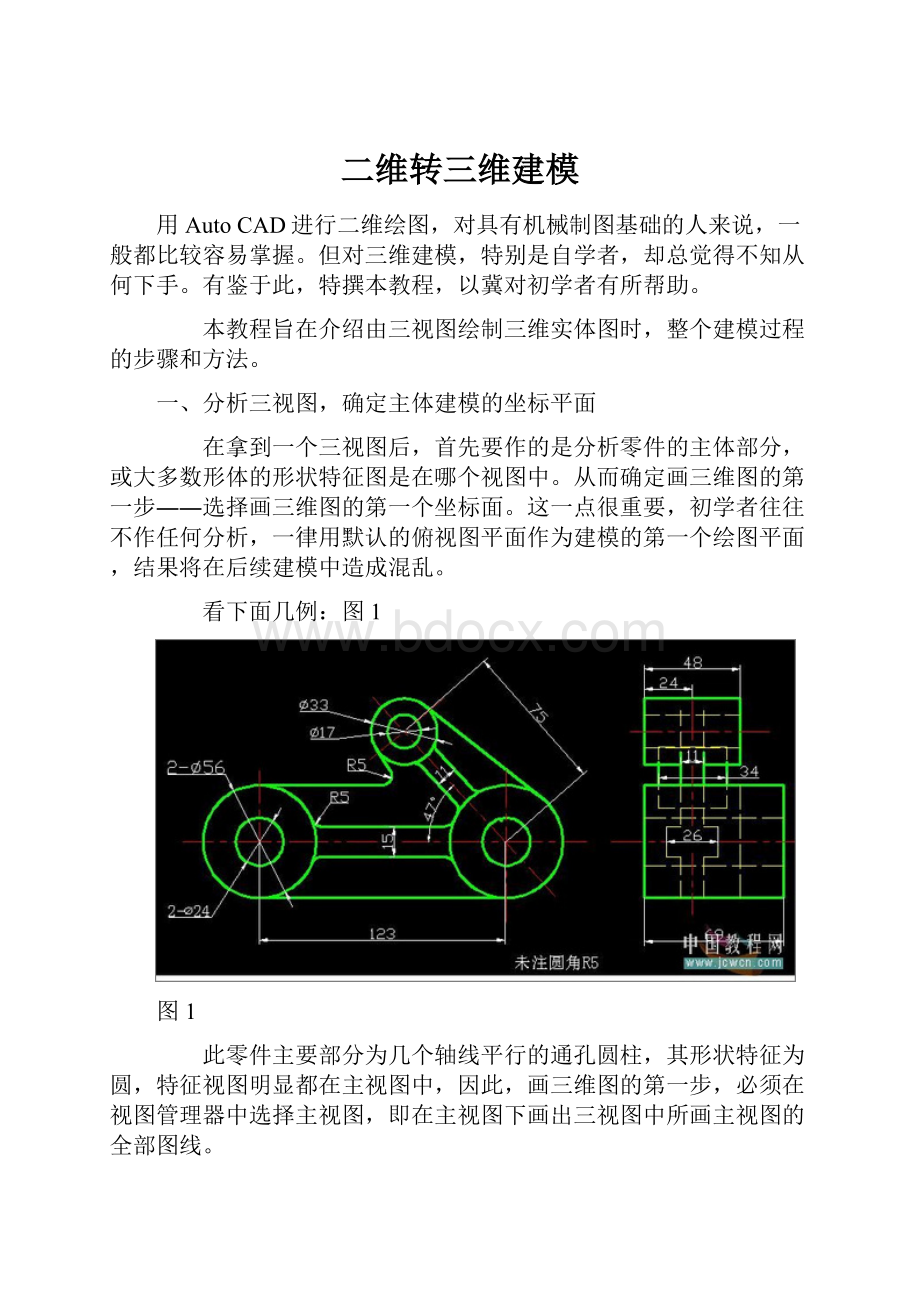
图1
图1
此零件主要部分为几个轴线平行的通孔圆柱,其形状特征为圆,特征视图明显都在主视图中,因此,画三维图的第一步,必须在视图管理器中选择主视图,即在主视图下画出三视图中所画主视图的全部图线。
图2
此零件的特征图:
上下底板-四边形及其中的圆孔,主体-圆筒及肋板等,都在俯视图,故应在俯视图下画出三视图中的俯视图。
图3是用三维图模画三维图,很明显,其主要结构的形状特征――圆是在俯视方向,故应首先在俯视图下作图。
图3
二、构型处理,尽量在一个方向完成基本建模操作
确定了绘图的坐标平面后,接下来就是在此平面上绘制建模的基础图形了。
必须指出,建模的基础图形并不是完全照抄三视图的图形,必须作构型处理。
所谓构型,就是画出各形体在该坐标平面上能反映其实际形状,可供拉伸或放样、扫掠的实形图。
如图1所示零件,三个圆柱筒,按尺寸要求画出图4中所示6个绿色圆。
与三个圆筒相切支撑的肋板,则用多段线画出图4中的红色图形。
其它两块肋板,用多段线画出图中的两个黄色矩形。
图4
这样处理后,该零件的建模操作可在一个方向上完成。
不要担心红色肋板穿过了两圆筒的孔,这可以在对圆筒差集后得到圆满处理。
要注意的是必须先并后差。
这是后话。
再如图3所示零件,左侧半圆筒,用多段线画出图5中所示绿色图形;右侧的内孔及键槽也须用多段线画出;中间的水平肋板,则用多段线画出如图中的红色图形。
该零件中垂直方向的梯形肋板,由于在俯视图中不反映实形,故不能在此构型,需另行处理。
图5
2回顶部
三、确定零件上各形体的建模位置
画出了各形体的实形图后,即可转到西南等轴测图下,进行拉伸、放样等建模操作。
但必须先确定各形体建模的准确位置。
仍以图3所示零件为例,左侧半圆柱体的下端面,比右侧圆筒的下端面高4mm,而中间水平肋板的下端面,又比左侧半圆柱体的下端面高2mm,按此尺寸将左侧图形和中间红色图形移动到位如图6:
图6
之后即可按尺寸将各图拉伸到位,如图7。
图7
必须明确,第一个绘图平面为俯视图平面时,所画图形均处于零件的底部(Z轴的正方向朝上);而第一个绘图平面为主视图平面时,所画图均位于零件的后面(Z轴的正方向指向绘图者);第一个绘图平面为左视图平面时,所画图形则位于零件的右端(Z轴的正方向朝左)。
如图1所示零件,在转到西南等轴测图下以后,必须按左视图中所标三肋板的后面相对于该零件后面(本例为三圆筒的后面)的位置进行移动(移动前应准确计算出应移距离),如图8:
图8
之后即可按尺寸将各形体拉伸到位如图9:
图9
这样处理以后,拉伸高度一定是正值,直接输入数字即可。
3回顶部
四、其它位置的建模
对于那些不在主建模平面内反映实形的部分,一般可在刚才建模的西南等轴测图下进行处理。
有的可直接在此三维坐标系下画出实形图,并进行拉伸或放样等操作,有的必须调整UCS坐标。
再以图3所示零件为例,可以在西南等轴测图下按其定形定位尺寸直接作出垂直肋板的实形图-梯形,如图10中的黄色梯形。
然后,可在此坐标系下直接对此梯形进行拉伸操作(拉伸前用三维多段线重描此梯形,或在画梯形时直接用三维多段线画)。
要注意的是,如果此实形图画在该肋板的后平面上,拉伸时高度取正值;如果画在该肋板的前端面上,拉伸时的高度应取负值。
图10中画在肋板的后端面上。
图10
进行差、并集后得到实体。
如图11:
图11
图12所示零件,三板分别在三个不同的坐标平面上。
由三视图可知,水平板在俯视图中反映实形,故基础建模平面可选俯视平面。
在俯视图下画出水平板的实形图后,转西南等轴测图进行拉伸得水平板实体。
之后可在此三维坐标下直接变换UCS坐标(用Z轴矢量),画出立板的实形图后拉伸成形。
如图12。
图12
对于与水平板成135°夹角的斜板,必须先转到主视图,按位置要求画出与水平板成实角135°的斜线,如图13。
图13
然后用动态观察仪将其转到可观察的位置,用三点确定UCS坐标位置,如图14所示。
图14
接下来即可在此坐标系下画出斜板的实形图,如图15。
图15
按尺寸要求拉伸到位,如图16。
图16
差、并集后完成实体建模,图17。
图17
必须指出,三维建模的方法很多,途径也各有不同,本文所举各例的建模方法仅是诸法之一,但建模思路大致应该如此
 升级会员
升级会员 