计算机组成原理课程设计硬布线控制器的设计与实现Word文档下载推荐.docx
《计算机组成原理课程设计硬布线控制器的设计与实现Word文档下载推荐.docx》由会员分享,可在线阅读,更多相关《计算机组成原理课程设计硬布线控制器的设计与实现Word文档下载推荐.docx(18页珍藏版)》请在冰豆网上搜索。
指令格式
SWC
SWB
SWA
KRR
读寄存器堆方式
1
KRD
读双端口存储器方式
KWE
写双端口存储器方式
KLD
加载寄存器堆方式
PR
启动程序方式
机器指令名称
助记符
R7
R6
R5
R4
R3
R2
R1
R0
加法
ADDRd,Rs
Rd+Rs->
Rd
RS1
RS0
RD1
RD0
减法
SUBRd,Rs
Rd-Rs->
乘法
MULRd,Rs
Rd*Rs->
逻辑与
ANDRd,Rs
Rd&
Rs->
存数
STARd,[Rs]
Rd->
[Rs]
取数
LDARd,[Rs]
[Rs]->
Rd
无条件转移
JMP[Rs]
PC
条件转移
JCD
C=1
PC+D->
D3
D2
D1
D0
停机
STP
暂停运行
X
老师提供的控制台指令流程图:
在这个控制台里,我们将控制台指令KRR,KRD,KWE,KLD,PR分别拆分为KRR1,KRR2,KRD1,KRD2,KWE1,KWE2,KLD1,KLD2和PR1,PR2。
每个小指令分别占用W1-W4四个节拍。
分2次执行完成。
控制信号
信号作用
信号有效条件
C
在加法运算和减法运算时产生的进位信号
T4上升沿
ALU_BUS
允许运算结果送往数据总线
LDDR1
M1=0时DR1接收寄存器堆A端口数据
T3下降沿
M1=1时DR1接收数据总线DBUS数据
LDDR2
M2=0时DR2接收寄存器堆B端口数据
M2=1时DR2接收数据总线DBUS数据
WRD
控制双端口寄存器堆RF的写操作
1且T2上升沿
RS_BUS#
控制RF的B端口数据是否能送DBUS上
LDER
将DBUS上的数据打入暂存寄存器ER
1且T4上升沿
SW_BUS#
将SW7-SW0数据送往DBUS
CEL#
选中双端口存储器RAM左端口
LRW
允许RAM左端口读操作
1且T3上升沿
允许RAM左端口写操作
0且T3上升沿
CER
RAM右端口读出数据并放到指令总线INS上
禁止右端口操作
LDAR1
将DBUS数据打入地址寄存器AR1
AR1_INC
AR1的值加1
LDAR2
M3=0时AR2的数据从程序计数器PC打入
1且T2下降沿
M3=1时AR2的数据从DBUS打入
LDR4
M4=1时R4的数据从DBUS打入
M4=0时R4的数据从IR0-IR3打入
PC_ADD
ALU2完成PC和IR低4位相加即PC+D
PC_INC
PC+1
LDPC
程序计数器PC接收来自DBUS的地址
LDIR
将来自RAM的指令打入指令寄存器IR
S2,S1,S0
选择运算器ALU的运算类型
控制台控制信号作用:
三、设计方案
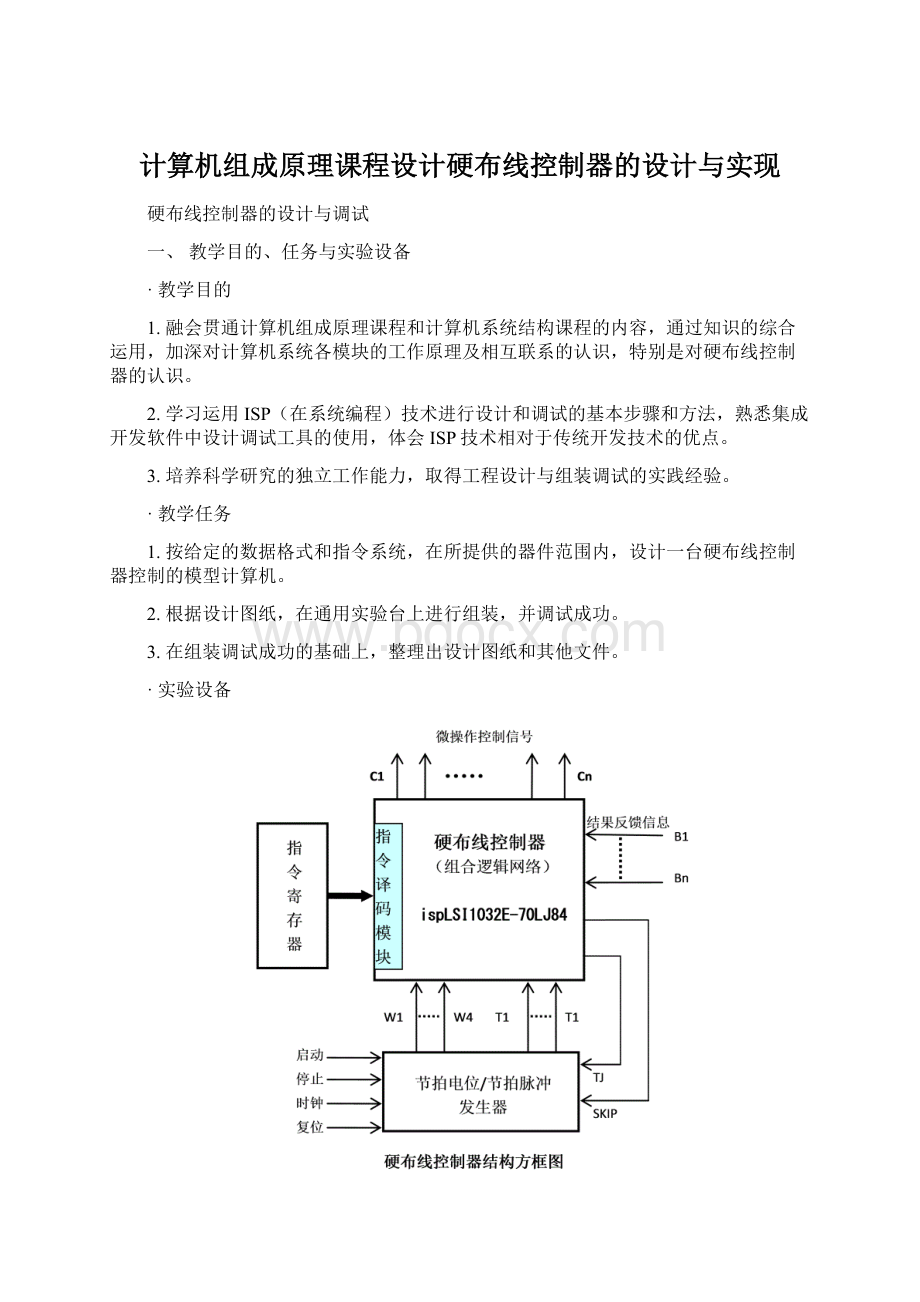
设计硬布线控制器的控制流程,也就是解决Mi、Im、Bj如何起作用的问题。
设计微程序控制器时可以使用流程图,设计硬布线控制器同样可以使用流程图。
微程序控制器的控制信号以微指令周期为时间单位,硬布线控制器以节拍为时间单位,两者本质上是一样的,1拍和1个微指令周期都是从时序T1的上升沿到
T4的下降沿的一段时间。
在微程序控制流程图中,1个执行框代表1个微指令周期,而在硬布线控制流程图中,1个执行框就代表1拍。
执行一条机器指令所需的微指令数目,在硬布线控制器中相当于机器指令所需的节拍数。
决定执行一条指令需要的节拍数,要根据所有指令而定。
既不能只考虑某些需要最多节拍的指令,也不能只考虑节拍数最少的指令,一般要根据大多数机器指令所需的节拍数而定,设计才比较合理。
在本实验中,由于选用4拍对大多数指令就够用,所以节拍发生器产生4个节拍信号(W1—W4)。
统一用4拍执行1条机器指令后,对于所需节拍较少的的指令,例如JMP指令只用2拍(忽略中断),剩下2拍就无事可做了。
这在可行性上当然没有问题,但在性能上就打了折扣,因为多余的节拍都浪费掉了。
为减少浪费,在时序电路中加入了一个控制信号SKIP的输入,该信号的作用是使节拍发生器在任意状态下直接跳到最后1拍(W4)。
这样,设计控制流程时,在所需节拍较少的的指令流程的适当位置使SKIP控制信号有效,多余的节拍就可以跳过,从而提高了性能。
机器指令选用四拍以后,将一条机器指令的执行化为占用两条(或者更多)机器指令的节拍,执行一条指令就可以占用W1、W2、W3、W4、W1、W2、W3、W4。
为了区分一条指令的两个不同阶段,我们加了个ST内部信号作为标志位,当ST=0时,标志执行指令的前四个节拍,当ST=1时,标志执行指令的后四个节拍。
注意到只有CLR#到来后的第四拍时ST信号才发生翻转,所以又设了一个SSTO信号作为ST信号的触发信号。
具体实现ST-SSTO模块如下:
我们增加了一个标志位RUN,由于按CLR#按钮复位后,实验系统的时序停止在T4,W4,ST的值为0,这样SSTO=!
ST&
W4的值为1.按QD启动按钮后,由于立即产生T1信号,在T1的上升沿使ST置1,在第一组W1,W2,W3,W4时,ST的值为1,这是我们不希望看到的。
增加了标志位RUN后,按CLR#按钮复位,使RUN为0。
由于SSTO=!
ST*W4*RUN,因此复位后的SSTO=0.按QD启动按钮,在T1的上升沿,使RUN=1。
根据SSTO的布尔表达式,在W1,W2,W3时,SSTO=0,直到W4时,才使SSTO=1,由于ST:
=CLR#*SSTO#CLR*ST,在W4过后的下一个T1的上升沿,才使ST置1,从而将控制台操作的两种状态区分开来。
根据控制台指令设计出的硬布线控制器:
逻辑状态表:
根据硬布线指令流程图画出状态表,然后根据表格,列写出每个信号的逻辑表达式,并写出ABEL语言的源程序:
(状态表在此文档最后可见。
去下载横版:
本来是有这个版本的,可以在打印出来的时候添加到中间空白的这一页,只可以我上传的那张表,XX未审核通过,说我的文档质量太低了,虽然我设置的是免费。
算了,自己用Excel改一下吧。
)
四、
设计的实现(ABEL-HDL)
ABEL语言源代码如下:
MODULEComputeDECLARATIONS
"
输入管脚
SWC,SWB,SWAPIN3..5;
IR7,IR6,IR5,IR4PIN6..9;
MF,T1,W1,W2,W3,W4,C,CLRPIN10..17;
输出管脚
ALU_BUS,AR1_INC,CEL,CER,LDAR1,LDAR2,LDDR1,LDDR2,LDER,LDIR,LDPC,LDR4,LRWPIN29..41;
PC_INC,PC_ADD,RS_BUS,SW_BUS,WRD,SKIP,TJ,M1,M2,M3,M4,S0,S1,S2PIN45..58;
自定义
MF1,SSTONODEISTYPE'
COM'
;
RUN,STNODEISTYPE'
REG'
tKRR,tKRD,tKWE,tKLD,tPRNODEISTYPE'
KRR1,KRD1,KWE1,KLD1,PR1,KRR2,KRD2,KWE2,KLD2,PR2NODEISTYPE'
ADD,SUB,MUL,AND,LDA,STA,JMP,JC,STPNODEISTYPE'
CLK=.C.;
EQUATIONS
MF1=!
CLR&
MF#T1&
CLR;
RUN:
=CLR;
RUN.CLK=MF1;
ST:
=CLR&
SSTO#CLR&
ST;
ST.CLK=MF1;
SSTO=!
RUN&
W4;
指令译码部分
tKRR=SWC&
!
SWB&
SWA;
tKRD=!
SWC&
tKWE=!
tKLD=!
tPR=!
KRR1=!
tKRR;
KRR2=ST&
KRD1=!
tKRD;
KRD2=ST&
KWE1=!
tKWE;
KWE2=ST&
KLD1=!
tKLD;
KLD2=ST&
PR1=!
tPR;
PR2=ST&
ADD=PR2&
(!
IR7)&
IR6)&
IR5)&
IR4);
SUB=PR2&
(IR4);
MUL=PR2&
(IR5)&
AND=PR2&
LDA=PR2&
(IR6)&
STA=PR2&
JMP=PR2&
(IR7)&
JC=PR2&
STP=PR2&
数据通路管脚译码
ALU_BUS=(ADD#SUB#MUL#AND)&
W3#(STA&
W4);
AR1_INC=(KRD2#KWE2)&
CEL=!
((KRD2#KWE2#KLD2#KRR2)&
W1#(W3&
LDA)#(W4&
STA));
CER=(KLD2#KRR2)&
W2#(W1&
PR2);
LDAR1=W4&
(KRR1#KRD1#KWE1#KLD1)#(W2&
LDA)#(W2&
STA);
LDAR2=W4&
(KRR1#KLD1)#(PR2&
W1);
LDDR1=W2&
(ADD#SUB#MUL#AND);
LDDR2=LDDR1#(W2&
LDER=W3&
(KLD2#ADD#SUB#MUL#AND#LDA);
LDIR=CER;
LDPC=W4&
(PR1#JMP#(JC&
C));
LDR4=LDPC;
LRW=W1&
KRD2#W3&
LDA;
M1=!
LDDR1;
M2=!
LDDR2;
M3=W4&
(KRR1#KLD1);
M4=W4&
(PR1#JMP);
PC_INC=W1&
PR2;
PC_ADD=W4&
JC&
C;
RS_BUS=!
(W2&
(LDA#STA)#W4&
(KRR2#JMP));
SW_BUS=!
(W1&
(KWE2#KLD2#KRR2)#(W3&
KLD2)#(W4&
ST));
S0=SUB#STA;
S1=ADD#SUB;
S2=MUL;
SKIP=W1&
ST#(W1&
(KRD2#KWE2))#(W2&
(KRR2#STA))#W2&
(JMP#JC#STP);
TJ=W1&
KRD2#W2&
KLD2#W4&
(tKRR#tKWE#tKLD)#W4&
STP;
WRD=W4&
END
对程序进行编译,无误后下载到芯片。
连线,调试,验收
连线按照ABEL程序里面对管脚的定义连线
寄存器和内存单元内容:
寄存器
存入内容
内存单元
60H
24H
61H
83H
计算结果:
内容
0A7H
五、本次设计的体会
这是我们计算机专业做的第一个硬件和软件结合的课程设计,个人认为,这是最好的一个课程设计安排,将学习道德东西用起来,才是最好的结果,锻炼了我们的动手能力和思考能力。
硬布线控制器在课本上没有详细讲解,但却是以前的CPU使用的布线方式,想要深入学习硬件知识,了解这些东西是很有必要的。
微程序控制器的出现是为了代替硬布线控制器,如果没有对微程序控制器的工作方式和原理的理解,不可能设计出硬布线控制器的控制逻辑。
所以这次实验,我们对计算机的工作原理有了更进一步的了解,尤其是指令系统的工作原理,各个部件的工作之间的协调和配合等。
这次课程设计大大锻炼了我们的动手能力,由于是手工接线,任何一条线出现问题都会影响到整个系统的执行,幸好我们都很细心的连线,在这方面没出问题,也让我感觉到认真的去做一件事情的确不是那么的容易。
分析也变得尤为重要。
不仅如此,设计过程中团队的合作精神也得到了锻炼,任何一个项目的完成,都需要大家的通力合作。
实验中需要将所编程序下载到芯片中,这就使我们对现今硬件设计软件化的主流方向有了实践层次的理解,并让我们掌握了一些简单的设计实现方法。
总之,本次实验是一次难得的学习与发挥的机会,也是我最喜欢的一个课程设计,在实验让我体会到了思考与创造的乐趣。
参考文献:
1.《计算机组成原理》白中英老师编写
2.本学期的五次实验指导书
OUTPUT
ST=0
ST=1
KRR1
KRD1
KWE1
KLD1
PR1
KRR2
KRD2
KWE2
KLD2
W4
W1
W2
W3
M1
M2
M3
M4
S0
S1
S2
W1,W3
SKIP
TJ
W2,W4
SSTO
ST=1PR2
PR2
ADD
SUB
MUL
AND
LDA
STA
JMP
JC
W4&
 升级会员
升级会员 