自动控制原理问题详解.docx
《自动控制原理问题详解.docx》由会员分享,可在线阅读,更多相关《自动控制原理问题详解.docx(19页珍藏版)》请在冰豆网上搜索。
自动控制原理问题详解
第一章习题答案
习题
1-1根据题1-1图所示的电动机速度控制系统工作原理图
(1)将a,b与c,d用线连接成负反馈状态;
(2)画出系统方框图。
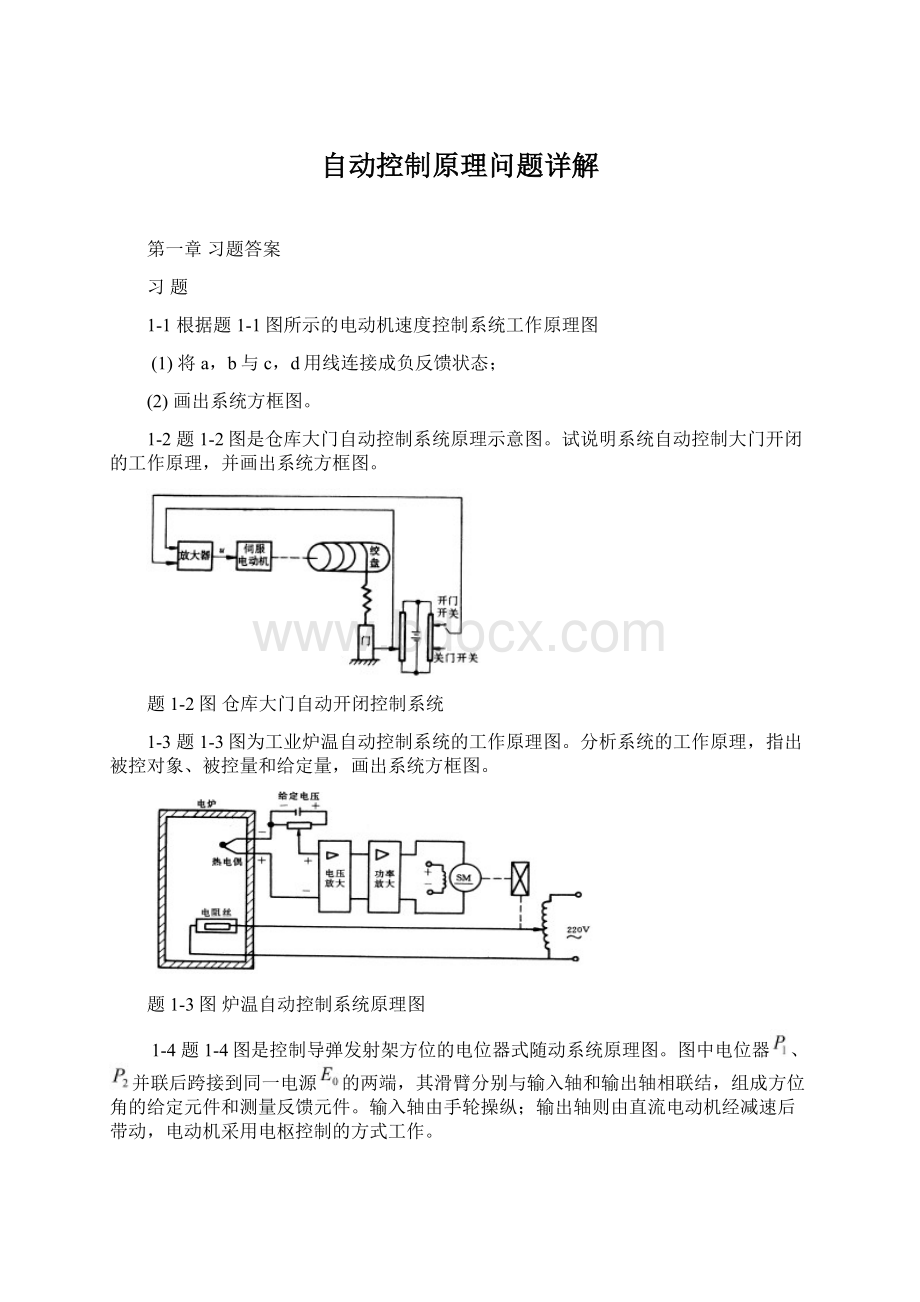
1-2题1-2图是仓库大门自动控制系统原理示意图。
试说明系统自动控制大门开闭的工作原理,并画出系统方框图。
题1-2图仓库大门自动开闭控制系统
1-3题1-3图为工业炉温自动控制系统的工作原理图。
分析系统的工作原理,指出被控对象、被控量和给定量,画出系统方框图。
题1-3图炉温自动控制系统原理图
1-4题1-4图是控制导弹发射架方位的电位器式随动系统原理图。
图中电位器、并联后跨接到同一电源的两端,其滑臂分别与输入轴和输出轴相联结,组成方位角的给定元件和测量反馈元件。
输入轴由手轮操纵;输出轴则由直流电动机经减速后带动,电动机采用电枢控制的方式工作。
试分析系统的工作原理,指出系统的被控对象、被控量和给定量,画出系统的方框图。
题1-4图导弹发射架方位角控制系统原理图
题1-5图蒸汽机转速自动控制系统
1-5采用离心调速器的蒸汽机转速控制系统如题1-5图所示。
其工作原理是:
当蒸汽机带动负载转动的同时,通过圆锥齿轮带动一对飞锤作水平旋转。
飞锤通过铰链可带动套筒上下滑动,套筒装有平衡弹簧,套筒上下滑动时可拨动杠杆,杠杆另一端通过连杆调节供汽阀门的开度。
在蒸汽机正常运行时,飞锤旋转所产生的离心力与弹簧的反弹力相平衡,套筒保持某个高度,使阀门处于一个平衡位置。
如果由于负载增大使蒸汽机转速下降,则飞锤因离心力减小而使套筒向下滑动,并通过杠杆增大供汽阀门的开度,从而使蒸汽机的转速回升。
同理,如果由于负载减小使蒸汽机的转速增加,则飞锤因离心力增加而使套筒上滑,并通过杠杆减小供汽阀门的开度,迫使蒸汽机转速回落。
这样,离心调速器就能自动地抵制负载变化对转速的影响,使蒸汽机的转速保持在某个期望值附近。
指出系统中的被控对象、被控量和给定量,画出系统的方框图。
1-6摄像机角位置自动跟踪系统如题1-6图所示。
当光点显示器对准某个方向时,摄像机会自动跟踪并对准这个方向。
试分析系统的工作原理,指出被控对象、被控量及给定量,画出系统方框图。
题1-6图摄像机角位置随动系统原理图
1-7题1-7图(a),(b)所示的系统均为电压调节系统。
假设空载时两系统发电机端电压均为110V,试问带上负载后,图(a),(b)中哪个能保持110V不变,哪个电压会低于110V,为什么?
题1-7图电压调节系统工作原理图
1-8题1-8图为水温控制系统示意图。
冷水在热交换器中由通入的蒸汽加热,从而得到一定温度的热水。
冷水流量变化用流量计测量。
试绘制系统方块图,并说明为了保持热水温度为期望值,系统是如何工作的?
系统的被控对象和控制装置各是什么?
1-9许多机器,像车床、铣床和磨床,都配有跟随器,用来复现模板的外形。
题1-9图就是这样一种跟随系统的原理图。
在此系统中,刀具能在原料上复制模板的外形。
试说明其工作原理,画出系统方框图。
题1-8图水温控制系统原理图
1-10题1-10图(a),(b)所示均为调速系统。
(1)分别画出图(a)、图(b)对应系统的方框图。
给出图(a)正确的反馈连线方式。
(2)在恒值输入条件下,图(a)、图(b)中哪个是有差系统,哪个是无差系统,说明其道理。
题1-10图调速系统工作原理图
1-11题1-11图为谷物湿度控制系统示意图。
在谷物磨粉的生产过程中,有一个出粉最多的湿度,因此磨粉之前要给谷物加水以得到给定的湿度。
图中,谷物用传送装置按一定流量通过加水点,加水量由自动阀门控制。
加水过程中,谷物流量、加水前谷物湿度以及水压都是对谷物湿度控制的扰动作用。
为了提高控制精度,系统中采用了谷物湿度的顺馈控制,试画出系统方块图。
题1-11图谷物湿度控制系统示意图
第二章习题答案
2-1
(1)
其中:
,
传递函数为:
(2)
其中:
,,
传递函数为:
2-2解:
(1)比较器
(2)放大器
(3)速度反馈
(4)电枢回路
(5)电动机轴上的力矩平衡
………机电时间常数
………..电框回路的电磁时间常数
2-3
2-4
其中:
两个环节之间有负责效应。
(b)
其中:
两个环节之间无负责效应。
2-5(a)
其中:
(b)
其中:
(c)
其中:
,,
(d)
这是准PI调节,当时
2-6(a)
(b)
2-7
2-8信号流图如下:
2-9信号流图如下:
2-10(a)五个回环,四个互不接触的回环,四条前向通道
(b)四个回环,一对互不接触回环,二条前向通道
第三章习题答案
3-1故传递函数为:
3-2当时,
,
初始条件为零,则
输入信号S
所以
其传递函数
3-3解:
则:
∴
由公式
可得系统单位阶跃响应
各项性能指标:
①超调量
②上升时间
③峰值时间
④调节时间
5振荡次数(考虑的误差带)
3-4解:
由图3-49可知:
即联立求解得
∴系统的开环传函
3-5
(1),,
(2),,
(3),,
(4),,
3-6系统在阶跃信号作用下稳态误差为“0”的充分条件为:
系统在加速度信号作用下稳态误差为“0”时
3-7单位斜坡信号作用下的稳态误差
当选时,。
3-8
(1)当系统为I型系统时,系统的开环传递函数为:
(2)当系统为II型系统时,系统的开环传递函数为:
3-9系统开环传递函数
3-10解:
当时,,
当时,
3-11解:
(1)
(2)无论K取何值,系统都不稳定
(3)
(4)
3-12解:
(1)系统稳定时
(2)当时,闭环极点均位于直线的左边
3-13解:
,
3-14解:
系统临界增益,响应的振荡频率为
3-15解:
,
3-16解:
系统单位脉冲响应
第五章习题答案
5-2解:
(1)
(2)
5-3解:
,
5-4解:
系统地传递函数为
5-5解:
(a)
,
(b)
,
(c)
,
(d)
,
(e)
,
(f)
,
5-6解:
(1)k=1
(2)k=25
5-7解:
(a).N=1,Z=0稳定(b).N=-1,Z=1不稳定
(c).N=1,Z=0稳定(d).N=0,P=0,Z=0稳定
(e).N=0,P=0,Z=0稳定(f).N=-1,P=1,Z=2不稳定
(g).N=-2,P=0,Z=2不稳定(h).N=0,P=0,Z=0稳定
(i).N=-2,P=1,Z=3不稳定
5-8解:
时,系统稳定
时,系统不稳定
5-9解:
(1)
(2)w=2.1642,k=5.156
5-10解:
(1),
(2)k=1.69
(3)k=12.1
5-11解:
5-12解:
(1)
(2)
5-13解:
(1)k=0.74
(2)k=1.1(3)k=0.511
5-14解:
当K>1时,奈氏图如图所示,P=1,N=1,Z=0系统稳定
5-15解:
(1)
(2)
5-16
5-17
5-18
(1)
(2)幅值裕量G=19.8168,相角裕量P=Inf,相位穿越频率wg=5.6578,开环剪切频率wc=NaN
5-19当K=10.428时,相角裕量P=300
5-20
(1)当K=5时,bode图如图所示
第八章习题答案
8-1
(1)
(2)
(3)
(4)
8-2
(1)
=
(2)
(3)
(4)
(5)
(6)
8-3
(1)
(2)
(3)
(4)
8-4
(1)
(2)
8-5
8-6
(1)
8-7
(1)
(2)
8-8
T=0.1时
T=0.5时
8-9
(1)
(2)
8-10
(1)系统稳定
(2)
8-1108-12
8-13
(1)
(2)
 升级会员
升级会员 