FANUC伺服报警Word格式文档下载.docx
《FANUC伺服报警Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《FANUC伺服报警Word格式文档下载.docx(105页珍藏版)》请在冰豆网上搜索。
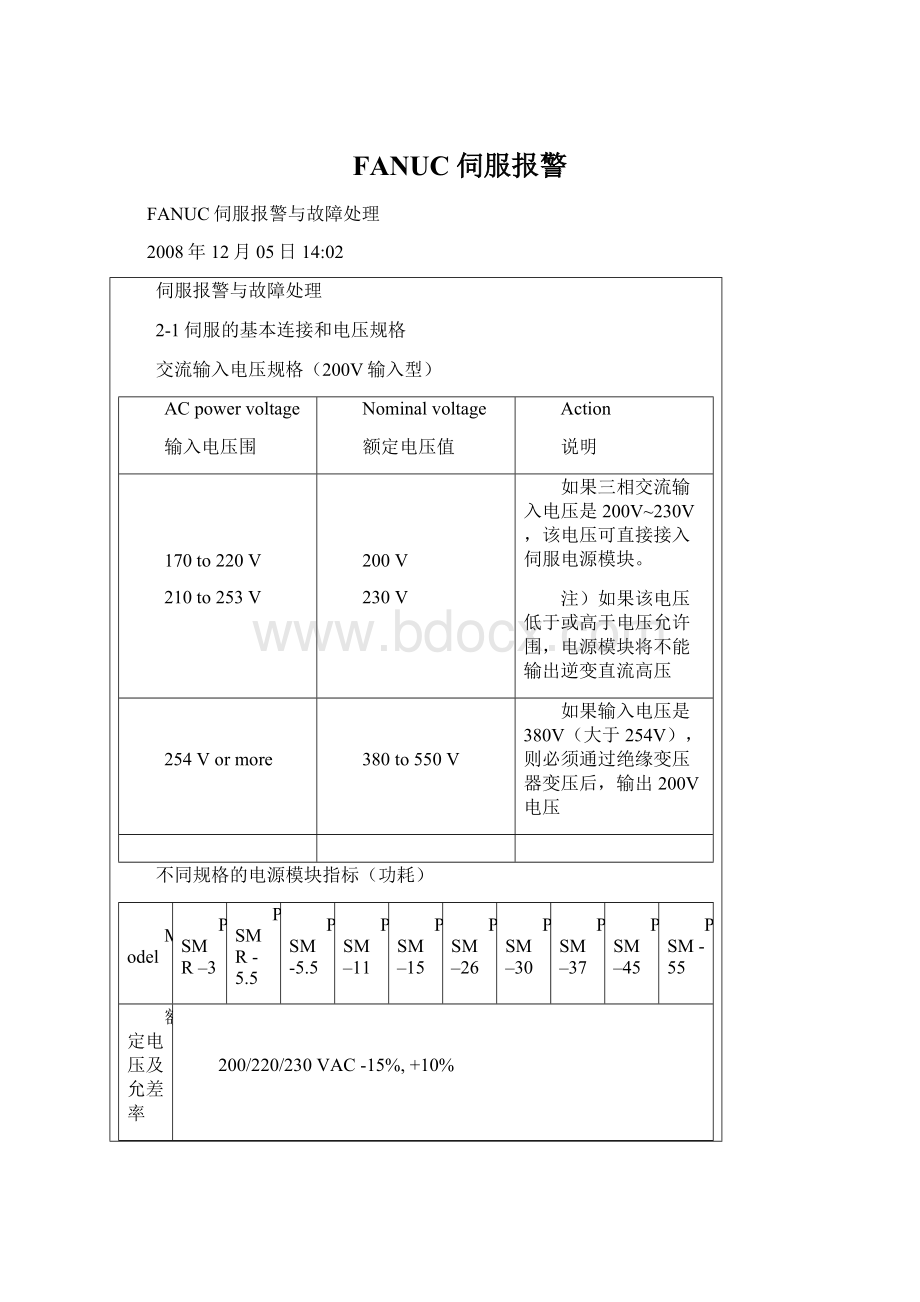
PhaseL1(phaseR)current
Thecurrentispositivewhenitisinputtotheamplifier.
IS
PhaseL2(phaseS)current
Amountofcurrent
PSM5.5
37.5A/1V
PSM11
PSM15
50A/1V
PSM26
75A/1V
PSM30
100A/1V
PSM37
PSM45
150A/1V
PSM55
PSM18HV
PSM30HV
PSM45HV
PSM75HV
+24V
+5V
0V
Controlpower
例如:
型号PSM11的电源模块,从IR/IS端子测出电压为2V,则实际负载电流是
37.5X2=75(安)
2-2报警显示(CRT/LCD报警容)
(1)电源模块和伺服的相报警
AlarmNo.
SVM
SPM
PSM
DescriptionRemarks
叙述
参照
说明书
360
Pulsecoderchecksumerror(built-in)
装式编码器校验错误
3.3.7
(1)
361
Pulsecoderphaseerror(built-in)
装式编码器相位错误
363
Clockerror(built-in)
装式编码器时钟错误
364
Softphasealarm(builtin)
装式编码器软相位报警
365
LEDerror(built-in)
装式编码器发光二极管错误
366
Pulseerror(built-in)
装式编码器脉冲错误
367
Counterror(built-in)
装式编码器计数错误
368
Serialdataerror(built-in)
装式编码器串行数据错误
3.3.7(3)
369
Datatransfererror(built-in)
装式编码器数据传送错误
380
LEDerror(separate)
分离型编码器发光二极管错误
3.3.7
(2)
381
Pulsecoderphaseerror(separate)
分离型编码器脉冲编码器相位错误
382
Counterror(separate)
分离型编码器计数错误
383
Pulseerror(separate)
分离型编码器脉冲错误
384
Softphasealarm(separate)
相位错误
385
Serialdataerror(separate)
分离型编码器串行数据错误
386
Datatransfererror(separate)
分离型编码器数据传输错误
417
Invalidparameter
无效的参数
3.3.6
421
Excessivesemi-fullerror
执行半闭环错误
3.3.8
430
Servomotoroverheat
伺服电机过热
3.3.5
431
03
Converter:
maincircuitoverload
主回路过载
3.1
432
06
controlundervoltage/openphase
逆变器控制电压欠电压或缺相
433
04
DClinkundervoltage
逆变器直流环欠电压
434
2
Inverter:
controlpowersupplyundervoltage
驱动器控制电压欠电压
3.2
435
驱动器直流环欠电压
436
Softthermal(OVC)
软过热(过电流)
3.3.3
437
01
inputcircuitovercurrent
逆变器输入回路过电流
438
8
A
b
C
d
E
currentalarm(Laxis)
(Maxis)
(Naxis)
(LandMaxes)
(MandNaxes)
(LandNaxes)
(L,M,andNaxes)
驱动器电流报警
439
07
DClinkovervoltage
逆变器直流环过电压
440
08
Converterexcessivedeviationpower
逆变器电压异常
441
Currentoffseterror
电流偏差错误
442
05
DClinkcharging/inverterDB
逆变器直流环放电异常
443
coolingfanstopped
逆变器风扇停止
444
1
internalcoolingfanstopped
驱动器冷却风扇停止
445
Softdisconnectionalarm
软断线报警
3.3.4
446
Harddisconnectionalarm
硬断线报警
N/A
447
Harddisconnectionalarm(separate)
硬断线报警(光栅)
448
Feedbackmismatchalarm
反馈不同步报警
449
8.
9.
A.
b.
C.
d.
E.
IPMalarm(Laxis)
驱动器初始化灯报警(Maxis)
453
Softdisconnectionalarm(αpulsecoder)
α系列脉冲编码器软短线报警
FANUC伺服报警与故障处理
(二)
(2)主轴模块相关报警
Remarks
749
ProgramROMerror
主轴只读存储器报警
3.4
A0
A1
ProgramRAMerror
主轴随机存储器报警
A2
A3
SPMcontrolcircuitclockerror
主轴模块控制回路时钟错误
A4
SRAMparityerror
随机存储器奇偶校验错误
7n01
Motoroverheat
主轴电机过热
7n02
Excessivespeeddeviation
速度偏差过大
7n03
DClinkfuseblown
直流环保险损坏
7n04
Inputpowersupplyopenphaseandpowersupplyfailure
输入电压缺相或故障
7n07
Excessivespeed
超速
7n09
09
Maincircuitoverload
7n11
11
DClinkovervoltage
直流环过电压
7n12
DClinkovercurrent/IPMalarm
直流环过电流
750
13
CPUinternaldatamemoryerror
CPU存错误
7n15
15
Outputswitching/spindleswitchingalarm
16
RAMerror
19
ExcessiveoffsetofthephaseUcurrentdetectioncircuit
U相偏置超差
20
ExcessiveoffsetofthephaseVcurrentdetectioncircuit
V相偏置超差
说明:
表中PSM——电源模块
SPM——主轴模块
SVM——伺服模块
表中“逆变器”是指驱动模块的电源模块——PSM
FANUC数字伺服参数的初始化设置
数字伺服参数的初始化设置
由于数字伺服控制是通过软件方式进行运算控制的,而控制软件是存储在伺服ROM中。
通电时数控系统根据所设定的电机规格号和其它适配参数——如齿轮传动比、检测倍乘比、电机方向等,加载所需的伺服数据到工作存储区(伺服ROM中写有各种规格的伺服控制数据),而初始化设定正是进行电机规格号和其它适配参数的设定。
设定方法如下:
1.在紧急停止状态,接通电源。
2.确认显示伺服设定调整画面的参数
SVS(#0)=1(显示伺服画面)
*按照下面顺序,显示伺服参数的设定画面
按[SYSTEM]健,再按翻页(扩展)键,找到软件键
[SV-PRM]
*
使用光标、翻页键,输入初始设定必要的参数
(1)
初始设定位
#3(PRMCAL)1:
进行参数初始设定时,自动变成1。
根据脉冲编码器的脉冲数自动计算下列值。
PRM2043(PK1V),PRM2044(PK2V),PRM2047(POA1),
PRM2053(PPMAX),PRM2054(PDDP),
PRM2056(EMFCMP),
PRM2057(PVPA),PRM2059(EMFBAS),
PRM2074(AALPH),PRM2076(WKAC)
#1(DGPRM)0:
进行数字伺服参数的初始化设定。
1:
不进行数字伺服参数的初始化设定。
#0(PLC01)0:
使用PRM2023,2024的值。
在部把PRM2023,2024的值乘10倍。
(2)电机ID号
选择所使用的电机ID号,按照电机型号和规格号(中间4位:
A06B-XXXX-BXXX)列于下面的表格中。
对于本手册中没叙述到的电机型号,请参照α系列伺服放大器说明书。
例:
电机类型
α1/5000i
α2/5000i
α4/3000i
α8/3000i
电机规格
0202
0205
0223
0227
电机类型号
152(252)
155(255)
173(273)
177(377)
α12/3000i
α22/3000i
α30/3000i
α40/3000i
0243
0247
0253
0257
193(293)
197(297)
203(303)
207(307)
□αCi系列伺服电机
αC4/3000i
αC8/2000i
αC12/2000i
αC22/2000i
0221
0226
0241
0246
171(271)
176(276)
191(291)
196(296)
(3)任意AMR功能
注意:
设定为“00000000”
(4)CMR
CMR为1/2-1/27
CMR为0.5-48
设定值=————+100
CMR
设定值=2XCMR
(5)关断电源,然后再打开电源。
(6)进给齿轮比N/M(F.FG)。
设定半闭环α脉冲编码器
(注1)
F.FG分子(≤32767)
电机每转所需的位置反馈脉冲
——————————=——————————————
F.FG分母(≤32767)
1,000,000(注2)
(不能约分小数)
1.对分子和分母,最大设定值(约分后)是32767。
2.对柔性齿轮比,αi脉冲编码器假定电机每转有1000000个脉冲,
3.如果计算电机转数时使用了π值,比如使用齿轮和齿条,假定π值
近似为355/113
[例]
对检测单位为1μm,指定如下:
丝杆导程
(mm/rev)
所需的脉冲数
(脉冲/转)
F.FG
10
30
10000
20000
30000
1/100
2/100或1/50
3/100
对旋转轴,机械有一1/10的减速齿轮和设定为1000度的检测单位,则电机每转一转工作台旋转360/10度的移动量。
对工作台而言,每1度所需脉冲为1000位置脉冲。
电机一转的所需移动量为:
F.FG分子/F.FG分母=36000/1000000=36/1000
设定独立脉冲编码器(全闭环)
依照最小检测单位移动量的
F.FG分子(≤32767)
位置反馈脉冲量
——————————=————————————
1,000,000(注2)
使用0.5-um刻度来检测1-um距离,设定如下:
F.FG分子/F.FG分母=(L/1)/(L/0.5)=1/2
《计算例》
(7)移动方向
+111正向,-111负向
(8)速度脉冲数,位置脉冲数
①串行αi脉冲编码器或串行α脉冲编码器时:
参数号
设定单位1/1000mm
设定单位1/10000mm
闭环
半闭环
高分辨率设定
2000
xxxxxxx0
xxxxxxx1
分离型检测器
1815
00100010
00100000
速度反馈脉冲
2023
8192
819
位置反馈脉冲
2024
NS
12500
NS/10
1250
注:
1.NS为电机一转的位置反馈脉冲数(4倍后)。
2.闭环时,也要设定PRM2002#3=1,#4=0。
(9)参考计数器
参考计数器的设定主要用于栅格方式回原点,根据参考计数器的容量使电机转一转。
所以,参考计数器设定错误后,会导致每次回零的位置会不一致,也即回零点不准。
参考计数器容量设定值是指电机转一转所需的(位置反馈)脉冲数,或者设定为该数能够被整数除尽的分数。
也可以理解为返回参考点的栅格间隔
所以,参考计数器容量=栅格间隔/检测单位
栅格间隔=脉冲编码器1转的移动量
《设定举例》
丝杠螺距
栅格间隔
检测单位
所需的位置脉冲数
参考计数器容量
栅格宽度
10mm/转
0.001mm
10000脉冲/转
10mm
20mm/转
20000脉冲/转
20mm
30mm/转
30000脉冲/转
30mm
l
将电源关闭,然后再接通。
(10)FSSB显示和设定画面
通过一个高速串行总线(FANUC串行伺服总线,或FSSB)连接CNC控制单元到伺服放大器,只用用一根光缆,可显著减少机床电气的电缆使用量。
轴设定会根据轴和放大器部之间关系自动计算并输入到FSSB设定画面。
参数1023,1905,1910-1919,1936和1937会按计算结果自动定义。
具体设定方法见第3部分iB/iC/18i系列FSSB的设置
注意
在设定伺服参数之前,请确认下面的数据是否准备:
<
1>
数控系统类型
如:
0ic
2>
伺服电机规格号
α6/2000
3>
装式编码器电机
αA1000
4>
分离型编码器电机
Y/N
5>
电机每转机床移动发出的脉冲数
10mm/每转
6>
机床检测单位
0.001mm
7>
数控指令单位
串口通信基本接线方法
2008年12月21日12:
9针串口(DB9)
25针串口(DB25)
针号
功能说明
缩写
数据载波波检测
DCD
接收数据
RXD
3
发送数据
TXD
4
数据终端准备
DTR
信号地
GND
7
6
数据设备准备好
DSR
请求发送
RTS
清除发送
CTS
振铃指示
DELL
2.RS232C串口通信接线方法(三线制)
9针-9针
25针-25针
9针-25针
一般都为9针,制作两端为孔的串口线。
接线图如下表:
9脚(一头)
信号名称
9脚(另一头)
1
2
---RXD----
3
----TXD---
4
---DTR----
6
5
----GND----
-----DSR---
7
----RTS----
8
----CTS----
其中几点注意点:
(A)屏蔽一定要和串口接头的外壳相连。
(B)如果不进行DNC加工只进行程序传送可以将机床端的串口线的4、6短接、7、8短接。
(C)如果所用的数控系统为FANUC系统,可将机床端的串口线的4、6短接,否则进行程序传送时会有086号报警。
线做好后就可以分别插在机床及多串口卡的串口上,千万注意不能带电拔插,至少有一端要求断电,否则可能会烧坏数控系统的串口板。
不同编码机制不能混接,如RS232C不能直接与RS422接口相连,市面上专门的各种转换器卖,必须通过转换器才能连接;
DB9(FEMALE/母头)的序号:
------------母头的前面板
\-------------/
\54321/
\9876/
---------
unixware711下装gds双机软件,需要特殊的串口线做心跳
要求1、4对接,接到对方的6,
本方的5接到对方的5
本方的2、3接到对方的3、2
本方的7、8接到对方的8、7
IBMHACMP串口心跳线的制作
连接头1
连接头2
功能
7+8
RTS2
→
CTS2+CD1
Rx
←
Tx
Signalground
DT
 升级会员
升级会员 