专用精压机的设计.docx
《专用精压机的设计.docx》由会员分享,可在线阅读,更多相关《专用精压机的设计.docx(16页珍藏版)》请在冰豆网上搜索。
专用精压机的设计
一、精压机的基本功能和相关工艺参数及主要设计要求
1.功能:
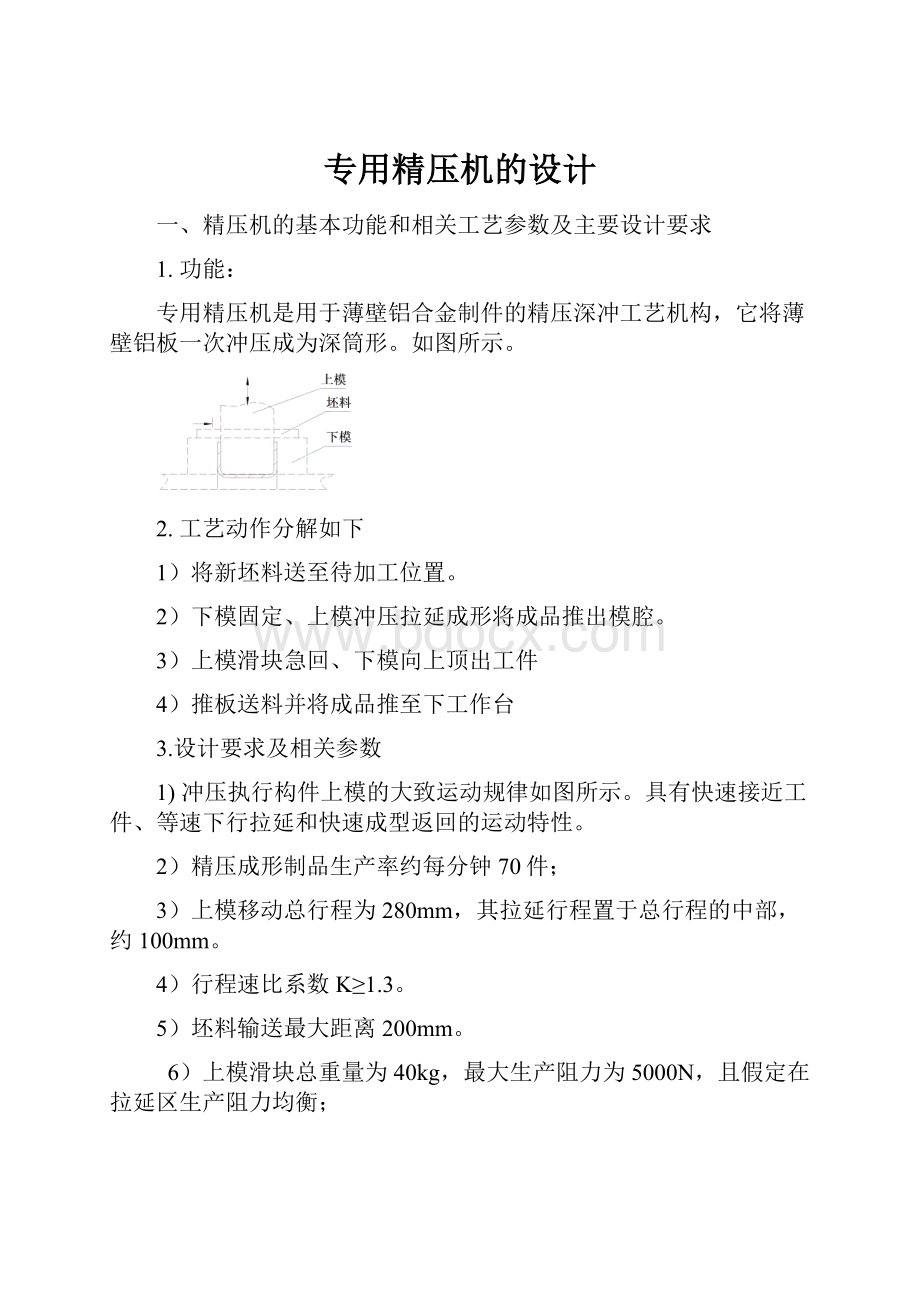
专用精压机是用于薄壁铝合金制件的精压深冲工艺机构,它将薄壁铝板一次冲压成为深筒形。
如图所示。
2.工艺动作分解如下
1)将新坯料送至待加工位置。
2)下模固定、上模冲压拉延成形将成品推出模腔。
3)上模滑块急回、下模向上顶出工件
4)推板送料并将成品推至下工作台
3.设计要求及相关参数
1)冲压执行构件上模的大致运动规律如图所示。
具有快速接近工件、等速下行拉延和快速成型返回的运动特性。
2)精压成形制品生产率约每分钟70件;
3)上模移动总行程为280mm,其拉延行程置于总行程的中部,约100mm。
4)行程速比系数K≥1.3。
5)坯料输送最大距离200mm。
6)上模滑块总重量为40kg,最大生产阻力为5000N,且假定在拉延区生产阻力均衡;
7)设最大摆动构件的质量为40kg/m,绕质心转动惯量为2kg.m^2/mm,质心简化到杆长的中点。
其它构件的质量及转动惯量均忽略不计;
8)传动装置的等效转动惯量(以曲柄为等效构件,其转动惯量设为30kg.m^2,机器运转不均匀系数『δ』为0.05)。
二、工作原理和工艺动作分析
1.工作原理
本机用于薄壁铝合金制件的精压深冲工艺,上模先已逐渐下降的速度接近胚料,然后以匀速进行拖延成型,随后上模继续下行将成品推出模腔,最最后快速返回。
上模退出固定不动的下模后,送料机构从侧面将新胚料送至加工位置,从而完成一个工作循环
2.工艺动作的分析
推板送料
由推板将待加工工件推至预定的工作位置。
上、下模冲压工件
在送料机构完成送料回程时已经进入冲压工作阶段。
上模滑块先快速接近工件,接近时以等速对其进行冲压,而下模在等速冲压时恰好达到极限位置,顶住工件实现精压。
上模滑块急回、下模向上顶出工件
上模滑块机构急回向上退回,下模滑块则由原本的最低极限位置向上运动,将精压好的成品向上顶出。
推板送料并将成品推至下工作台
推板完成一次送料后再次送料,而此时成品已被下模顶出下一个加工工件恰好将成品推至下工作台。
同时将新工件送至预定加工位置。
三、运动规律及运动协调设计
上冲头加压机构的原动件每转一周完成一个运动循环,所以拟定运动循环图时,以该原动件的转角为横坐标(0~360˚),以各执行构件的位移为纵坐标画出位移曲线。
运动循环图上的位移曲线主要着眼于运动的开始位置,而不必准确地表示出运动规律。
由机构运动循环图可知:
机构在一个运动周期,当上模运动在它的正行程时,推杆和上顶机构都在回程中;当上模冲压完成之后,推杆开始将胚料输送至待加工位置,上顶机构也同时将成品顶出下模,实现一个工作周期。
四、执行机构选型设计和方案评价
1.方案的设计
整个机构可分为2大部分:
1)冲压机构
主要运动构件:
上模
2)送料机构
主要运动构件:
推杆
且传送带送料机构实现间歇送料可采用凸轮机构、槽轮机构等.
如果考虑到成品有切边的情况,则需要一个将拉延后的成品上顶的机构来配合推杆完成推成品出模腔的运动。
3)顶杆机构
考虑到实际配料被冲压成形之后如果还留有切边,则成品就不能从下模的下部离开,在设计基础上增加了一个“上顶”机构。
使得成品可由下模滑块将其沿机构垂直顶出,然后同时由下一个送来的配料将其横向地推出下模工作台面。
方案一
冲压机构------凸轮连杆机构
送料机构------凸轮机构
方案二
凸轮—连杠冲压机构+摆杆—滑块送料机构
冲压机构由凸轮控制其运动方式,无太大的受力,需要的传动结构简单,通过倒置法能够确定凸轮的大致轮廓。
送料机构是由摆杆滑块机构组成的,按机构运动循环图可确定摇杆工作位置和从动件的运动规律,使其能在规定时间将工件送至待加工位置。
方案三
凸轮—连杆冲压送料机构
送料和冲压机构都是由凸轮连杆机构组成。
连杆机构可通过对杆长的计算设计,当选择好适当的杆长尺寸后,能实现所需的行程速比以及运动要求。
通过铰链点与杆长的适当选择,能使机构具有较小的压力角和较为理想的传动角,使其达到运动功能,满足传动要求。
凸轮轮廓线可根据运动的要求用机构倒置法求出,从而使送料、冲压和上顶同时完成,并也能满足急回与匀速这一运动要求,在完成预定运动的同时,使整个加工效率提高。
方案四
摆动导杆冲压机构+曲柄-滑块送料机构
冲压机构:
将其凸轮机构高副低代后得到了由摇杆和滑块组成的摆动导杆机构。
导杆机构的尺寸确定可按给定的行程速度变化系数K设计,上模将具有急回的特性,摇杆滑块机构的组合可按照要求使上模在工作段接近于匀速。
送料机构:
摇杆滑块送料机构通过齿轮与上部曲柄轴相连。
可调节其在整个运动中的初始位置使推杆在预定时间将胚料送至待加工的位置。
如取一定的偏距,则其也具有急回的特性。
2.上顶机构的设计
考虑到实际配料被冲压成形之后如果还留有切边,则成品就不能从下模的下部离开,而我又在第4方案的设计基础上增加了一个“上顶”机构。
使得成品可由下模滑块将其沿机构垂直顶出,然后同时由下一个送来的配料将其横向地推出下模工作台面。
这个“上顶”机构的运动方向基本和上模相同,上模在回程时呈现出急回的特性,而“上顶”机构为了迅速的将成品顶出,下模滑块需要急速向上运动的特性。
3.方案的确定
4个方案全部提出后,对四个方案进行了讨论和对比。
各个方案都是有不同的基础机构组成而成,且各个机构均能基本完成设计要求的运动。
在查阅资料后,决定采用第四种方案。
虽然凸轮能够可以无困难地设计出其轮廓曲线,使其满足规定的运动规律,但凸轮与从动件的点或线的高副接触是很易磨损的。
而设计要求中机构要每分钟生产约70件,机构的运转速度较大。
并且其上模滑块的总质量为40kg,最大生产阻力为5000N,故需要其机构较好的传力性能,而凸轮机构不适用于传力过大的场合。
因此我们选取第四个方案。
并且第4方案可以满足急回运动的要求,输送配料上工作台和上模冲压这2个工作步骤也可较容易的配合出来。
使整个机构完成一次送料冲压的周期。
五、机械运动方案示意图绘制
由上面可知选用第四方案,画出机械运动的示意图。
六、执行机构的运动尺度及运动分析
1.上模冲压机构的尺寸设计
因要求K>1.3,取K=1.8,得极位夹角θ=52°;另要求上模的总行程H=280mm
设α为DE与竖直方向夹角,
由前图可得:
2*CD*sin(θ/2)+DE*(1-cosα)=280
且因β极小
上式可变为:
2*CD*sin(θ/2)=280
得CD=320mm
取曲柄AB=250mm,得知AC=513mm
2.下模顶出机构尺寸设计:
下模采用与上模相称的设计方案,K值与上移距离均与上模相同,即曲柄
,机架
;
3.齿轮尺寸设计
整个机构的传动系统是由5个齿轮组成的,2个大齿轮F,L的存在是帮助3个小齿轮之间的传动,并让3个主要负责机构运动特性的小齿轮的转速和转向都一致。
为了计算的方便和统一,取3个小齿轮的尺寸相同,分度圆直径为300mm;2个大齿轮的尺寸也相同,分度圆直径为600mm。
取模数m=10,则得出小齿轮的齿数z=30,大齿轮的齿数z=60。
为了使推杆有急回特性,使其在回程时不与前进得胚料有碰撞,取其正偏距e=150mm。
精压机的立体图
4.运动分析
导杆机构的尺寸确定可按给定的行程速度变化系数K设计,上模将具有急回的特性,摇杆滑块机构的组合可按照要求使上模在工作段接近于匀速。
在所选方案中,在送料机构完成送料回程时已经进入冲压工作阶段。
上模滑块先快速接近工件,接近时以等速对其进行冲压,而下模在等速冲压时恰好达到极限位置,顶住工件实现精压。
上模滑块机构急回向上退回,下模滑块则由原本的最低极限位置向上运动,将精压好的成品向上顶出。
推板完成一次送料后再次送料,而此时成品已被下模顶出下一个加工工件恰好将成品推至下工作台。
同时将新工件送至预定加工位置。
如此就完成了冲压循环。
七、机械传动系统设计
分析的对象主要为上模、推杆和上顶机构的速读,位移和加速度等。
根据要求生产率约每分钟70件,添加马达转速为420rad/s,即0.86s/r。
原动件是机械系统中的驱动部分。
工作机对起动、过载、运转平整性、调速和控制要求较高,且专用精压机要求洁净的工作平台,所以它要求不能污染成品与工作台而且便于清洗,因而液压传动不符合条件,同时气压和液压的成本都较高,最终选择电动机传动。
通过对机构的分析和实际情况的综合考虑,对电机的各个参数做出如下计算:
首先,考虑到电机输出功率的传递效率问题,电机应该安装在靠近工作件的齿轮轴上,又由于大齿轮输入动力时可以传递较大的扭矩,故选择将电机安装在与齿轮F的轴线上,且根据任务书的要求:
每分钟生产
个工件,则电机的转速可以确定为
,故齿轮A的角速度就可以算得:
,那么由此首先可以确定A轮的转动惯量:
这里V1取半个行程的速度平均值
,冲压锤的质量
,由此可以推算出齿轮A的转动惯量为:
从而可以推出其他齿轮的转动惯量:
,
从而由此根据能量守恒定律在冲压成形的过程中,可以估算出电机的功率:
代入数据可得:
考虑到齿轮传输中的机械损失,取功率为的电机。
从而可以确定电机的型号为功率
,输出转速为
的交流电机。
八、间歇送料机构的选择设计
在这个课程设计中的送料机构可以选用凸轮机构同样也可以选用槽轮机构以实现间歇运动,在这里由于凸轮设计较为复杂故采用槽轮机构,
尺寸R=L*sin(π/z)
S=L*cos(π/z)
h>=2(L-R-r)
b<2(L-R-r)
取拨轮和槽轮的中心矩L=200mm,
槽轮的槽数为4,
则得R=S=141.42mm
由于送料机构非要求的重点在此刻不做过多的说明。
九、设计心得与体会
通过一周的机械原理课程设计,在老师的指导下,我终于将机械设计课程设计做完了,并且有很多的感触收获.
关于这种设计方面的知识所要求有严谨的思维、丰富的想象力、以及对各种机构作用及尺寸要求的认识了解。
在这一周的设计操作中,让我一个学机械的学生了解到了现在大二所学西的局限性,真正弄懂的东西并不算多,而且还有很多的东西你根本上就没能应用上的。
在这次作业过程中我,遇到了许多困难喝多吃的设计方案最后都证明是行不通的,这都暴露出了前期的我在这方面的能力的不足,在这次的操作中我知道了齿轮传动,凸轮机构设计步骤与方法,进一步了解了AutoCAD、Word这两个软件的操作,这些仅仅是工具软件熟练掌握也是必需的.对我来说收获最大的是方法和能力.那些分析和解决问题的方法与能力.在整个过程中我发现,像我们这些学生最最缺少的是经验没有感性的认识空有理论知识有些东西很可能与实际脱节.总体来说我觉得做这种类型的作业对我们的帮助还是很大的它需要我们将学过的相关知识都系统地联系起来从中暴露出自身的不足以待改进.团队合作的精神是完成任务的很大重要保证,我们分工合作,共同做出了这个课程设计,这让我们有了前所未有的喜悦感。
同时对于这一门的课程学科,让我对机械原理这门课程有了更深入了解.
对于大二所学的《机械原理》这门课程,它教会给我们的是让我们知道了各种不同类型的机构的作用和组成原理,以及今后进行设计所要考虑的方面,在我看来,有成本的高低,机构的可行性,机构的可操作性,加工的难易程度,等等的东西。
然后这次的课程设计让对所学的专业课产生了很大的兴趣.在做设计的过程中,我发现我们以后可以从事很多方面的工作,毕竟我们的生活中与他相关的东西好多好多的,各种各样的仪器,各种各样的电子组装设计和衍生到的各种材料的设计。
虽然这次设计已告一段落,但是我知道学海无涯、学无止境,这是一个结尾,同时也只是一个开始。
今后,我会以更饱满的热情投入到今后的学习生活中,做一个不断探索,勇于创新的大学生。
在整个过程中我发现了像我们这些学生最最缺少的是经验没有感性的认识空有理论知识有些东西很可能与实际脱节.总体来说我觉得做这种类型的作业对我们的帮助还是很大的它需要我们将学过的相关知识都系统地联系起来从中暴露出自身的不足以待改进.有时候一个人的力量是有限的合众人智慧我相信我们的作品
十、参考文献
1.《机械原理》高等教育朱理主编
2.《机械原理课程设计手册》高等教育 邹慧君 主编
3.《机械原理教程》清华大学申永胜 主编
4.《机械原理》高等教育文纬主编
5.《机械原理课程设计》高等教育戴娟主编
6.《机械原理课程设计指导书》高等教育罗洪田主编.
 升级会员
升级会员 