船用陀螺罗经.docx
《船用陀螺罗经.docx》由会员分享,可在线阅读,更多相关《船用陀螺罗经.docx(102页珍藏版)》请在冰豆网上搜索。
船用陀螺罗经
第五章磁罗经
第二篇水声导航仪器
第一篇 船用陀螺罗经
第1章 陀螺罗经指北原理
陀螺罗经是船舶上指示方向的航海仪器。
其基本原理是把陀螺仪的特性和地球自转运动联系起来,自动地找北和指北。
描述陀螺罗经指北原理所涉及的内容用式(1-1)表示:
陀螺罗经=陀螺仪+地球自转+控制设备+阻尼设备 (1-1)
第1节 陀螺仪及其特性
1. 陀螺仪的定义与结构
凡是能绕回转体的对称轴高速旋转的刚体都可称为陀螺。
所谓回转体是物体相对于对称轴的质量分布有一定的规律,是对称的。
常见的陀螺是一个高速旋转的转子。
回转体的对称轴叫做陀螺转子主轴,或称极轴.转子绕这个轴的旋转称为陀螺转子的自转。
陀螺转子主轴相当于一个指示方向的指针,如果这个指针能够稳定地指示真北,陀螺仪就成为了陀螺罗经。
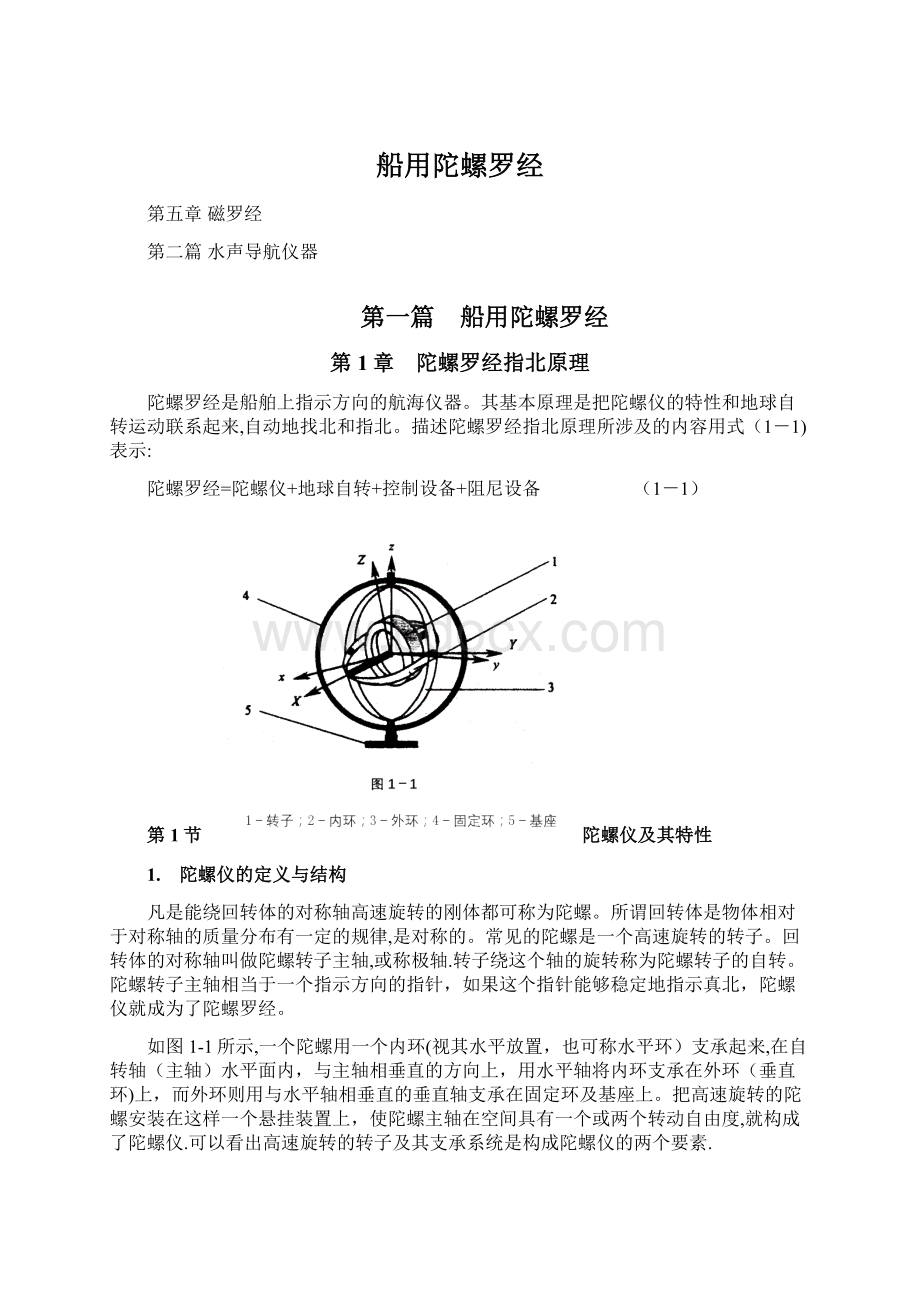
如图1-1所示,一个陀螺用一个内环(视其水平放置,也可称水平环)支承起来,在自转轴(主轴)水平面内,与主轴相垂直的方向上,用水平轴将内环支承在外环(垂直环)上,而外环则用与水平轴相垂直的垂直轴支承在固定环及基座上。
把高速旋转的陀螺安装在这样一个悬挂装置上,使陀螺主轴在空间具有一个或两个转动自由度,就构成了陀螺仪.可以看出高速旋转的转子及其支承系统是构成陀螺仪的两个要素.
实用罗经中,陀螺仪转子的转速都是每分钟几千转到每分钟几万转.陀螺仪的支承系统应具有这样的特点,即它应保证主轴在方位上指任何方向,在高度上指示任何高度,总之,能指空间任何方向.由此,我们可以将陀螺仪概述为:
陀螺转子借助于悬挂装置可使其主轴指空间任意方向,这种仪器就叫陀螺仪.
实用陀螺仪,其转子、内环及外环等相对主轴、水平轴以及垂直轴都是对称的,无论几何形体或质量都是对称的。
重心与几何中心相重合的陀螺仪称为平衡陀螺仪.不受任何外力矩作用的陀螺仪称为自由陀螺仪。
工程上应用的都是自由陀螺仪。
陀螺仪的转子能绕一个轴旋转,它就具备了一个旋转自由,也就是具有一个自由度。
像图1—1所示的陀螺仪,具有三个自由度,一是转子绕OX轴作自转运动,一是转子连同内环绕OY轴(水平轴)转动,一是转子连同内环和外环绕OZ轴(垂直轴)转动。
这种结构使转子主轴可指空间任意方向。
三轴交点O为陀螺仪的中心点,陀螺仪的重心位于O点。
所以它具有三个自由度,称为三自由度陀螺仪。
应当明确地指出,把陀螺仪定义为陀螺及其悬挂装置的总体是经典的定义,是有局限性的。
科学技术发展表明,有许多物理现象可以用来保持给定的方位,并能够测量载体的转动,即能产生陀螺效应。
这就是说产生陀螺效应不一定要有高速旋转的刚体。
因此,广义地说,凡能产生陀螺效应的装置都可称为陀螺仪。
2. 陀螺仪的特性
陀螺仪能制成指向仪器--陀螺罗经,是因为陀螺仪有着自己的、独特的动力学特性,这些特性就是定轴性和进动性.
1.自由陀螺仪的定轴性。
表明陀螺仪性能的主要物理参数是主轴动量矩H,它说明了转子高速旋转运动的强弱状态与方向.设图1—1所示的陀螺仪主轴动量矩H、即OX轴正向水平指空间某一方向;现将基座倾斜,则出现的现象如图1—2所示:
H、即OX轴正向仍指原来方向没变;如将基座旋转,也可看到同样的结果,H即OX轴仍然水平的指示原来的方向,没发生任何变化。
这说明,当一个自由陀螺仪不受任何外力矩作用时,它的主轴将保持其空间初始指向不变的特性,称作陀螺仪的定轴性。
2.陀螺仪的进动性。
若图1—1所示的陀螺仪的转子不转,这就是一般的刚体系统了。
在自转轴上,如OX轴正端作用一个力F(如图1-3,为清楚展示转子位置的变化,图中未画出支架系统),根据右手法则,F产生的力矩应作用于OY轴正向,以MY表示。
可以看到,转子在F力作用下,将绕OY轴转动,转动角速度为ωY,与MY同向.说明转子是沿着外力方向转动的,这不是进动。
使上述系统转子高速旋转,则成为了真正陀螺仪,当陀螺仪受外力矩MY作用时,转子动量矩H矢量端点(矢端)将绕着OZ轴转动了,转的方向符合这一规律:
H矢端向MY矢量方向,不是沿着270︒角方向,而是沿着90︒角方向向MY转,所以我们称这是以捷径向外矩MY转动(如图1-4)。
这种运动称之谓进动,这就是陀螺仪的进动特性.
应当明确,陀螺仪不受外力矩作用时,相对宇宙空间是定轴的;受外力矩作用时,却不定轴了,而产生了进动,这个运动显然也是相对宇宙空间的,不是相对其他的任意系统。
自然,谈到陀螺仪的进动性,有两个要点:
一是受外力矩作用;二是属于相对空间运动的运动方向。
一定要记清楚。
陀螺仪的特性可概括为以下两点:
(1)定轴性(gyroscopicinertia)-一在不受外力矩作用时,自由陀螺仪主轴保持它的空间的初始方向不变。
(2)进动性(gyroscopicprecession)—-在外力矩作用下,陀螺仪主轴的动量矩H矢端以捷径趋向外力矩M矢端,作进动运动或称旋进运动,可记为H→M。
陀螺仪的定轴性和进动性是可以互相转化的,其转化条件就看有无外力矩的作用.无外力矩作用时,陀螺仪主轴则相对于空间保持定轴;有外力矩作用时,陀螺仪主轴则相对于空间作进动运动。
在陀螺罗经中,当需要应用陀螺仪的定轴性时,则应尽一切努力设法减少有害力矩的影响;当需要陀螺仪按一定规律运动时,则应对它施加相应的外力矩。
3.进动公式
陀螺仪的主轴的动量矩H矢端进动快慢,用进动角速度ωp来表示。
在外力矩MY作用下的进动角速度应是作用在OZ轴上的矢量ωpz(因进动是绕OZ轴的!
)ωpz的方向用右手法则确定,如图1-5所示,右手四指沿着H矢端进动方向握住OZ轴(进动时绕着转的轴!
)伸开大拇指,则大姆指指示的方向就是ωp的矢量方向。
若外力矩作用在陀螺仪的OZ轴正向,即有+MZ,如图1—6所示,则所产生的进动是绕OY轴的,ωpy作用于OY轴的负向,即有—ωpy。
进动角速度的大小与什么有关呢?
下面公式阐明动量矩、外力矩与进动角速度三者之间的关系。
(1-2)
式(1-2)称为陀螺仪的进动公式.它的物理意义是很明显的。
一个陀螺仪,当H为常数时(实用的陀螺仪,一般H也就不变了),在外力矩M作用下,发生进动,显然M越大,进动越快。
明显的表现出陀螺仪的进动特点。
当M比较小时,进动就慢了;当M=0时,ωp=0,说明它不进动了,表现出它的定轴性.从另一个角度说,当M为常数时,比如仅作用有很小的常值干扰力矩,则陀螺仪的H越大,进动角速度越小,表明主轴越不易改变空间指向,即主轴容易稳定。
利用公式(1-2),写出陀螺仪在+MY和+MZ作用下的进动角速度分别为(如图1—7)
(1-3)
3. 陀螺仪主轴运动微分方程式
陀螺仪主轴运动,实际上就是在外力矩作用下,它在空间的进动,应当满足式(1-2)所描述进动关系,式中的M矢量应是任何方向,ωp矢量方向与M、H矢量方向满足右手法则。
在直角座标系中,为方便一般可用它们的分量形式,即都投影到三根座标轴上去,为简便M的分量都取正值,即取+MX、+MY、+MZ。
现在就讨论在这三个力矩作用下,主轴该如何进动了。
因为MX是作用陀螺仪的主轴上,与主轴动量矩H的夹角是0︒,不是90︒,则它的进动角速度为0,即MY力矩不引起进动.MY和MZ所引起的进动,满足式(1-3)的关系:
将其联立,并作简单变换,就是陀螺仪主轴的运动方程式了:
(1-4)
这组方程是从陀螺仪的进动原理导出的。
今后,我们就用式(1-4)来讨论陀螺仪在外力矩作用下,主轴的运动。
下列两个问题应当明确:
第一,式中的MY、MZ,它们是作用到陀螺仪上的所有外力矩之和分别在OY、OZ轴上的投影,换句话说,MY应是作用到OY轴上的所有外力矩之和,是作用到OY轴上的总外力矩;而MZ则应是作用到OZ轴上的总外力矩。
甚致,当轴承中的摩擦力矩也不能忽略时,都包含在内。
第二,式中的ωPY、ωPZ是宇宙空间的绝对运动角速度在陀螺仪坐标轴OY及OZ上的投影,它是绝对运动速度。
在我们所研究的体系中,主要包括宇宙、地球(以及地球上的船舶)和陀螺仪三个物理实体,陀螺仪主轴相对宇宙类似问题的绝对运动,应包含陀螺仪相对地球的相对运动和地球相对空间的牵连运动。
绝对运动速度等于牵连运动速度加相对运动速度。
为研究三个物理实体间的运动,就应建立三个坐标系:
空间坐标系,地理坐标系和陀螺坐标系.研究三个座标系间的运动关系。
空间坐标系Oξηζ:
是相对惯性空间固定不动的坐标系,它代表宇宙空间,坐标系原点O取在地球表面某一点,如图1—8所示。
三个坐标轴分别指向三颗恒星,构成右手直角坐标系。
Oξηζ在地球表面只能平移,不跟地球一起运动,即不管原点O转动那里,它们永远指三颗恒星不变.研究罗经、研究陀螺仪时,Oξηζ可以不画出来,但应始终记住,陀螺仪的运动是相对宇宙空间的绝对运动,其方程式是绝对运动方程式。
地理坐标系ONWZ0:
是随船运动的地理坐标系。
实际上代表地球自转与船舶运动在内的牵连运动体。
当陀螺仪固定放置在地球上某点时,它随地球自转一起运动,代表地球的自转运动.罗经装到运动的船上时,船也是牵连运动体,地理坐标系可与船一起运动,代表船的平移运动,构成了随船运动的地理坐标系。
三根坐标轴是这样选定:
O点(原点)选在地球表面,与陀螺仪的中心相重合,在子午面内选水平指北轴ON(图1—9);在水平面内选指正西轴OW,OW实际也是该处纬度圈的切线;过O点选OZ0轴垂直水平面指向天顶,OZ0轴实际是过O点的地球半径向天顶的延长线.这样就构成了一个代表地球的右手直角坐标,该坐标系的特点是,不管随船运动到哪里,各座标轴与地球的关系始终不变,即ON始终水平指北,OW始终水平指西,OZ0始终指天顶.
陀螺坐标系OXYZ。
是用来表示陀螺仪运动的坐标系.坐标系原点也取在陀螺仪的几何中心点O,OX轴与陀螺仪主轴重合,OY轴必须与内环轴重合,如图1—1所示,OZ轴在转子平面内且与XOY平面相垂直,构成右手直角坐标系动量矩是与OX轴重合的,我们的着眼点是OX轴的运动规律。
显然OXYZ坐标系与ONWZ0坐标系有这样的关系:
当OX轴与ON轴重合指北,OY轴与OW轴重合指西时,OZ与OZ0轴重合指天顶。
仅有坐标系还不够,还应有确定主轴运动状态的参量。
主轴OX相对地理坐标的运动有两个:
方位的变化和高度的变化。
用方位角α和高度角θ表示。
方位角α(azimuthangle):
它是陀螺仪主轴在地平面上的投影,与地平面上真北线ON之间的夹角,以子午面为基准,主轴偏在子午面西边时,方位角为正;主轴偏子午面东面时,方位角为负.
高度角θ(tiltangle):
它是主轴OX与主轴在地平面投影线之间的夹角,以水平面为基准,主轴上仰于地平面之上时,高度角为负;主轴下俯于地平面之下时,高度角为正。
在后面讨论罗经运动时,为了能简单明了地用图形表示陀螺仪主轴在地球上所指的方向,以及它的运动情况,我们在陀螺仪的正北方向,竖立一个投影面,可以把主轴指北端的端点投影到这个平面上,用讨论投影点运动的方法来观察罗经主轴的运动状况。
为此,引进可描述罗经主轴在方位α和高度θ上变化的投影图示法。
图1-11的投影面是这样表示的:
在地理坐标图的北端竖立一东西向的垂直平面,称为投影面。
子午面与投影面的交线为MM′,即真北线;水平面与投影面的交线为HH‘,即水平线,并在HH’上注明东(E)和西(w)。
在投影面上,MM’与HH'的交点N即为水平指北点。
投影面上的MM’线与HH′线组成一组直角坐标,罗经主轴的方位角α和高度角θ可分别用横坐标与纵坐标表示之.欲确定α和θ,可将罗经主轴的延长线与投影面相交,其交点即为罗经主轴指北端在投影面上的投影点.例如P点为投影点,其横坐标和纵坐标则分别表示罗经主轴指北端偏离子午面的方位角α与偏离水平面的高度角θ之大小。
附录1:
确定外力作用产生外力矩方向的方法--右手法则。
今后讨论罗经指北原理,经常要判定外力矩的方向,下面介绍这个右手法则的运用,一定要牢记.
如图1-12所示,伸开右手,掌心正对着支点O,四指沿着力的方向触到力的作用点上,伸开大姆指,则大姆指所
 升级会员
升级会员 