电力拖动自动控制系统运动控制系统习题解答第67章Word格式文档下载.docx
《电力拖动自动控制系统运动控制系统习题解答第67章Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《电力拖动自动控制系统运动控制系统习题解答第67章Word格式文档下载.docx(27页珍藏版)》请在冰豆网上搜索。
23
转差率sm和临界转矩Tm,
分析气隙磁通的变化,在额定电流下的电磁转矩,分析在恒转矩
负载和风机类负载两种情况下,调压调速的稳定运行范围。
UN和UN时的机械特性
调压调速在
临界转差率sm
Rs2
1UN时,
临界转矩Tem
气隙磁通Φm
UN
4.44f1NskNS
23UN时,
3np(2UN)
1RsRs2
2'
2
12(LlsL'
33UN
带恒转矩负载TL工作时,稳定工作范围为0ssm,带风机类负载运行,调速范围
6-3异步电动机参数如6-1题所示,若定子每相绕组匝数Ns125,定子基波绕组系数
kNS0.92,定子电压和频率均为额定值。
求:
(1).忽略定子漏阻抗,每极气隙磁通量Φm和气隙磁通在定子每相中异步电动势的有效值Eg;
(2).考虑定子漏阻抗,在理想空载和额
定负载时的Φm和Eg;
(3).比较上述三种情况下,Φm和Eg的差异,并说明原因。
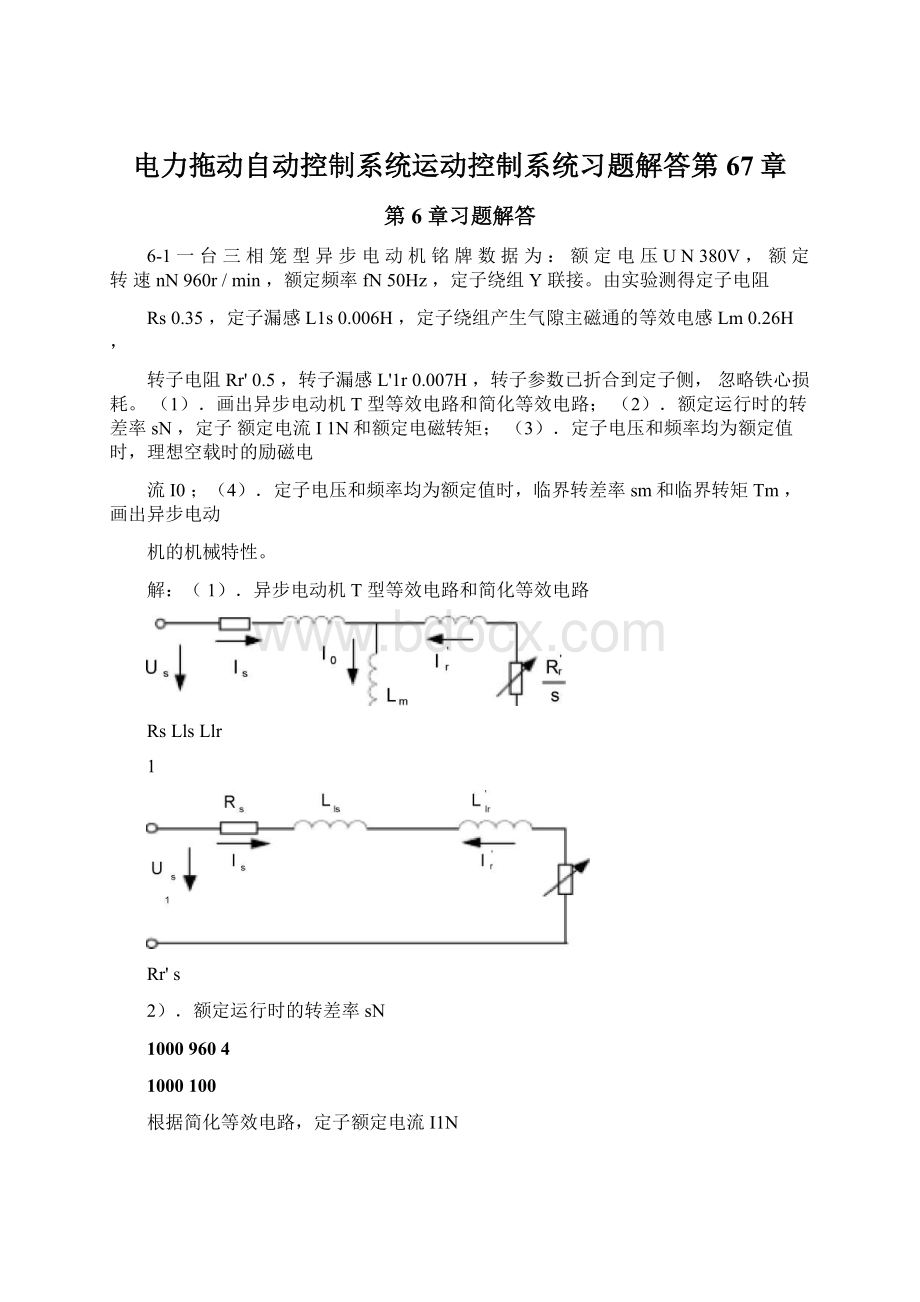
(1).忽略定子漏阻抗,
Eg4.44f1NNskNSΦm
2).考虑定子漏阻抗,在理想空载时同
(1)
额定负载时,根据简化等效电路,定子额定电流
I&
1N
U&
N/3
RsRr/sNj1(L1sL1r)
E&
g3(Rsj1L1s)I&
1N;
Φm4.44f1NNskNS
3).忽略定子漏阻抗时,不考虑定子漏阻抗压降,理想空载时,定子漏阻抗压降等于零,
两者相同。
考虑定子漏阻抗时,定子漏阻抗压降使得Φm和Eg减小。
6-4接上题,
(1).计算在理想空载和额定负载时的定子磁通Φms和定子每相绕组感应电动
势Es;
(2).转子磁通Φmr和转子绕组中的感应电动势(折合到定子边)Er;
(3).分析与
比较在额定负载时,Φm、Φms和Φmr的差异,Eg、Es和Er的差异,并说明原因。
(1).定子磁通Φms和定子每相绕组感应电动势Es
理想空载时,
I10,忽略励磁电流(下同),Es
UN,Φms
Es
4.44f1NNskNS
s
理想空载和额定负载时的
2).转子磁通Φmr和转子绕组中的感应电动势(折合到定子边)Er;
理想空载时,I10,
Er
额定负载时,
根据简化等效电路,定子额定电流
2'
N
Rs
Rr/sNj1(L1sL1r)
Tis1
idrr
Trs
ist1
Tis11
LrTLJ
;
Φmr
4.44f1N
NskNS
3
Er,离电机输入端远的反电势小。
mr
Eg
3).额定负载时,ΦmsΦmΦmr,Es
Lls
Llr
Us
Is
EgEr'
sr
6-5按基频以下和基频以上,分析电压频率协调的控制方式,画出
(1)恒压恒频正弦波供
电时异步电动机的机械特性;
(2)基频以下电压-频率协调控制时异步电动机的机械特性;
(3)基频以上恒压变频控制时异步电动机的机械特性;
(4)画出电压频率特性曲线
Uf(f)。
(1)恒压恒频正弦波供电时异步电动机的机械特性;
(2)基频以下电压-频率协调控制
时异步电动机的机械特性;
(3)基频以上恒压变频控制时异步电动机的机械特性;
4)电压频率特性曲线
时,输出电压U等于额
。
(1)求出基频以下,
5Hz时,比较补偿与
6-6异步电动机参数同6-1题,逆变器输出频率f等于额定频率fN定电压UN。
考虑低频补偿,当频率f0,输出电压U10%UN电压频率特性曲线Uf(f)的表达式,并画出特性曲线;
(2)当f
不补偿的机械特性曲线,两种情况下的临界转矩Temax。
(1)基频以下,电压频率特性曲线
Uf(f)(0.9f0.1)UN
2)补偿与不补偿的机械特性曲线,两种情况下的临界转矩
0.19UN
0.9
当f5Hz时,补偿后电压Uf(5)(0.950.1)UN
50
22
3np(0.19
5Rs
临界转矩Te
6-7异步电动机基频下调速时,气隙磁通Φm、定子磁通Φms和转子磁通Φmr受负载的变换而变化,要保持恒定需采用电流补偿控制。
写出保持三种磁通恒定的电流补偿控制的相量表达式,若仅采用幅值补偿是否可行,比较两者的差异。
(1).定子磁通Φms恒定的电流补偿控制的相量表达式
2).气隙磁通Φm恒定的电流补偿控制的相量表达式
Us(Rsj1Lls)I1Eg
3).转子磁通Φmr恒定的电流补偿控制的相量表达式
s[Rsj1(LlsL'
lr)]I&
1E&
r
精确的补偿应该是幅值补偿和相位补偿,考虑实现方便的原因,也可仅采用幅值补偿。
6-8两电平PWM逆变器主回路,采用双极性调制时,用“1”表示上桥臂开通,“0”表示上桥臂关断,共有几种开关状态,写出其开关函数。
根据开关状态写出其电压空间矢量表达式,画出空间电压矢量图。
两电平PWM逆变器主回路:
采用双极性调制时,忽略死区时间影响,用
逆变器输出端电压:
1”表示上桥臂开通,“0”表示下桥臂开通,
Ud
Sx1
Sx0
uxU2d(2Sx
1)
以直流电源中点O'
为参考点
us(uA
uBej
uCej2)
SA
SB
SC
uA
uB
uC
us
u0
u1
3Ud
u2
3Ude3
u3
23Udej3
u4
23Ude
u5
u6
32Udej53
u7
空间电压矢量图:
6-9当三相电压分别为uAO、uBO、uCO,如何定义三相定子电压空间矢量uAO、uBO、uCO和合成矢量us,写出他们的表达式。
A,B,C为定子三相绕组的轴线,定义三相电压空间矢量:
uAO
uBO
uBOe
uCO
j2
uCOej2
合成矢量:
usuAOuBOuCO
j2uCOe
A(ej0)
6-10忽略定子电阻的影响,讨论定子电压空间矢量us与定子磁链ψs的关系,当三相电压
uAO、uBO、uCO为正弦对称时,写出电压空间矢量us与定子磁链ψs的表达式,画出各自
的运动轨迹。
用合成空间矢量表示的定子电压方程式:
Rsis
dψs
dt
忽略定子电阻的影响,
ψsusdt,
即电压空间矢量的积分为定子磁链的增量。
当三相电压为正弦对称时,定子磁链旋转矢量
ψs
电压空间矢量:
ej(1ts
j(1t
se
6-11采用电压空间矢量PWM调制方法,若直流电压ud恒定,如何协调输出电压与输出频率的关系。
直流电压恒定则六个基本电压空间矢量的幅值一定,
输出频率w1
开关周期T0,
03Nw1
Qust1u1t2u2t1Ud
T0T0T0
t2Udej3,t1,t2
t1,t2,T
t1
t2,零矢量作用时间增加,
所以插入零矢量可以协调输出电压与输出
频率的关系。
t2
T0
6-12两电平PWM逆变器主回路的输出电压矢量是有限的,若期望输出电压矢量us的幅值小于直流电压ud,空间角度任意,如何用有限的PWM逆变器输出电压矢量来逼近期望的输出电压矢量。
两电平PWM逆变器有六个基本空间电压矢量,这六个基本空间电压矢量将电压空间矢量分成六个扇区,根据空间角度确定所在的扇区,然后用扇区所在的两个基本空间电压矢量
分别作用一段时间等效合成期望的输出电压矢量。
6-13在转速开环变压变频调速系统中需要给定积分环节,论述给定积分环节的原理与作用。
由于系统本身没有自动限制起制动电流的作用,因此,频率设定必须通过给定积分
算法产生平缓的升速或降速信号,
6-14论述转速闭环转差频率控制系统的控制规律,实现方法以及系统的优缺点。
转差频率控制的规律为:
(1)在s
sm的范围内,转矩Te基本上与s成正比,条件是气隙磁通不变。
(2)在不同的定子电流值时,按图5-43的Usf(1,Is)函数关系控制定子电压和频
率,就能保持气隙磁通Φm恒定。
转差频率控制系统的优点是:
转差角频率*s与实测转速相加后得到定子频率1*,在调速过程中,实际频率1随着实际转速同步地上升或下降,加、减速平滑而且稳定。
同
时,由于在动态过程中转速调节器ASR饱和,系统以对应于smax的最大转矩Temax起、制
动,并限制了最大电流Ismax,保证了在允许条件下的快速性。
转差频率控制系统的缺点是:
转差频率控制系统是基于异步电动机稳态模型的,
Usf(1,Is)函数关系中只抓住了定子电流的幅值,转速检测信号不准确或存在干扰都以正反馈的形式传递到频率控制信号上来。
6-15用题6.1参数计算,转差频率控制系统的临界转差频率sm,假定系统最大的允许转
差频率smax0.9sm,试计算起动时定子电流。
转差频率控制系统的临界转差频率
起动时定子电流I
Eg/1
,其中E&
U3N(Rs
起动时定子电流Ismax
,其中Eg
L'
smax
sm
L
lr
第7章习题解答
7-1按磁动势等效、功率相等的原则,三相坐标系变换到两相静止坐标系的变换矩阵为
C3/230
现有三相正弦对称电流
iAImcos(t),
iBImcos(t3),iCImcos(t3),求
33
变换后两相静止坐标系中的电流
is和is
,分析两相电流的基本特征与三相电流的关系。
两相静止坐标系中的电流
is
iA
iB
iC
2iB
3i
i
2iC
2iC
其中,iAiB
2iA
23iB
2i
2A
3ii2
23Im
3[ej(
2[
t23)
cos(
j(t2)
3Im
3[cos(
3cos(t)
t)cos(t)]
t)
j
e3ejt
32cos(t)
3(ej3
2(e3
3e
2j
3)e
3sin
(2)sin(
j(
e3
ejt
j(t2)
ej
t]
3cos(
t)2Imsin(
两相电流与三相电流的的频率相同,两相电流的幅值是三相电流的的位差。
倍,两相电流的相
7-2两相静止坐标系到两相旋转坐标系的变换阵为
C2s/2r
cossin
sincos
将上题中的两相静止坐标系中的电流is和is变换到两相旋转坐标系中的电流isd和isq,坐
标系旋转速度ddt
1。
分析当1时,
isd和isq的基本特征,电流矢量幅值
isis2dis2q与三相电流幅值Im的关系,其中
是三相电源角频率。
32Im
cos(t)sin(t)
两相旋转坐标系中的电流
isd
isq
cos
sin
I
Im
sin(
cos(t)
sin(t)
2m
1t,两相旋转坐标系中的电流
当d
1时,
3Icos(t)
2Imsin(t)
电流矢量幅值
7-3按转子磁链定向同步旋转坐标系中状态方程为
npLm
JLr
Tr
Lm
d
dr
dism
dist
istr
LsLrTr
LsLr
npTL
JL
Lmi
ism
RsLrRrLmi
LsL2r
RsLrRrLmsrrmist
LsLr2
1ist
usm
1ism
Ls
ust
坐标系的旋转角速度为
Trr
ist
假定电流闭环控制性能足够好,电流闭环控制的等效传递函数为惯性环节,
dism
dist
Ti
Tiist
Ti为等效惯性时间常数,画出电流闭环控制后系统的动态结构图,输入为
i*sm和i*s,输出为
和r,讨论系统的稳定性。
电流闭环控制后系统的动态结构图
i*sm
ism
m
Tis1
ist
1Tr
1Tis1
nL
pm
Lr
TL
Te
np
J
转子磁链r子系统稳定,而转速子系统不稳定。
7-4笼型异步电动机铭牌数据为:
额定功率PN3kW,额定电压UN380V,额定电流
IN6.9A,额定转速nN1400r/min,额定频率fN50Hz,定子绕组Y联接。
由实验测得定子电阻Rs1.85,转子电阻Rr2.658,定子自感Ls0.294H,转子自感
Lr0.2898H,定、转子互感Lm0.2838H,转子参数已折合到定子侧,系统的转动惯量J0.1284kgm2,电机稳定运行在额定工作状态,假定电流闭环控制性能足够好。
试
ism、ist。
转子磁链r和按转子磁链定向的定子电流两个分量
由异步电动机稳态模型得额定转差率
sN
n1nN
150014001
150015
额定转差
sN1
sN2fN
100
15
rad/s
36.9A
由按转子磁链定向的动态模型得
Lmi
Trsm
Trψr
稳定运行时,dψr=0,故ψr=Lmism,
2.2835ism
ω=100p?
0.2898ωsTrism=?
ism
152.658
isis2mis2t12.28352ism2.493ism36.9
解得
36.9
2.493
4.79A
ist=2.2835ism=2.2835?
4.79=10.937A
转子磁链
ψr=Lmism=0.2838?
4.79=1.359Wb
7-5根据题7-3得到电流闭环控制后系统的动态结构图,电流闭环控制等效惯性时间常数
Ti0.001s,设计矢量控制系统转速调节器ASR和磁链调节器AFR,其中,ASR按典型
II型系统设计,AFR按典型I型系统设计,调节器的限幅按2倍过流计算,电机参数同题7-4。
忽略转子磁链的交叉耦合,电流闭环控制后系统的动态结构图
st
npLm
1)磁链调节器AFR设计
(s)转子磁链r的等效传递函数W(s)r
LM
,AFR选用PI
调
节器
rism(s)
Tis
1Trs
WPI(s)KPI(s1),校正后系统的开环传递函数
W(s)
KPI(s
1)1LM,令
,则
,令
Tis1Trs1
校正后系统的开环传递函数W(s)KPILM,等效开环传系函数KKPILM,惯性时间常s(Tis1)
数TTi,按KT0.5设计。
(2)转速调节器ASR设计
忽略负载转矩及转子磁链的变化率,即TL0,r常数,则转速的等效传递函
数W(s)(s)1npLmr,校正后系统的开环传递函数ist(s)Tis1JLrs
W(s)KPI(s1)1npLmrKPInpLm2r(s1),等效开环传系函数KKPInpLmr,hTi,sTis1JLrsJLrs2(Tis1)JLri
中频段宽度按h5设计。
7-6用MATLAB仿真软件,建立异步电动机的仿真模型,分析起动、加载电动机的过渡过程,电动机参数同题7-4。
7-7对异步电动机矢量控制系统进行仿真,分析仿真结果,观察在不同坐标系中的电流曲线,转速调节器ASR和磁链调节器AFR参数变化对系统的影响。
7-8用MATLAB仿真软件,对直接转矩控制系统进行仿真,分析仿真结果,观察转矩与磁链双位式控制器环宽对系统性能的影响。
7-9根据仿真结果,对矢量控制系统直接转矩控制系统作分析与比较。
习题7-6至7-9由读者自行仿真,并分析比较。
 升级会员
升级会员 