RFID系统的设计Word格式文档下载.docx
《RFID系统的设计Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《RFID系统的设计Word格式文档下载.docx(10页珍藏版)》请在冰豆网上搜索。
全自动的长距离车辆自动识别及出入控制,当装有电子标签的车辆通过出入口时!
基站自动读取标签上的识别信息!
经核实无误后!
自动开启出入控制设备,无须人工操作。
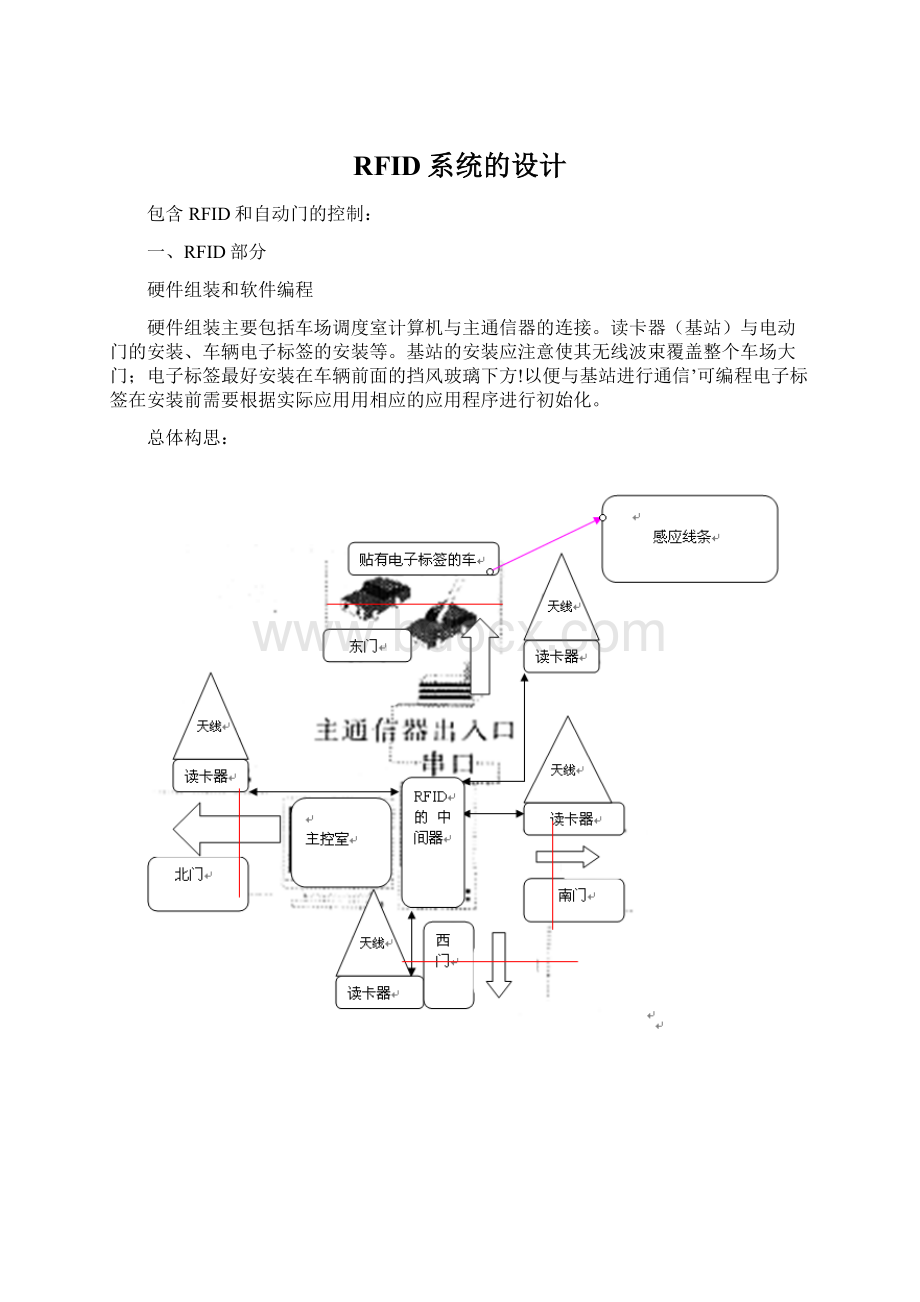
设计原理:
通信软件的后台数据库储存合法车辆的识别信息!
每一车辆与相应的可编程电子标签对应!
标签记录每个车辆的识别信息,在基站的控制范围内!
基站能与电子标签进行实时通信。
接收电子标签所提交的信息!
并把信息通过射频通信提交给主站!
主站通过串口线将数据信息提交给控制计算机。
计算机通过程序判断确认是合法车辆后反馈信息给主站。
基站接收主站的控制命令!
并通过无线通信监控电子标签!
启动或停止出入设备的放行动作。
从而控制车辆的出入。
如:
当监测到有车辆出入时!
基站接收电子标签所传送的信息数据。
发送信息得到允许通行反馈信息。
基站控制电动门电源接通,打开电动门,放行车辆。
并向主机发送车辆的通行记录,若基站检测到有不合法车辆的信息。
则会及时向主站报警,通信程序警示不良数据记录。
硬件结构通信:
本系统的硬件组成包括RFID读卡器、电子标签、RFID中间器、主控制器PC。
电子标签:
是RFID技术,RFID射频识别是一种非接触式的自动识别技术!
它通过射频信号自动识别目标对象并获取相关数据。
识别工作无须人工干预!
RFID技术有防水、防磁、耐高温、使用寿命长、读取距离大、标签上数据可以加密、存储数据容量更大、存储信息更改自如等优点。
电子标签放置在要识别的物体上,是射频识别系统真正的数据载体,由耦合元件以及微电子芯片(包含调制器、编码发生器、时钟及存储器)组成。
时钟把所有电路功能时序化,以使存储器中的数据在精确的时间内传输至阅读器,存储器中的数据是应用系统规定的唯一性编码,在电子标签安装到识别对象(如集装箱、车辆、动物等)前就己写入。
数据读出时,编码发生器把存储器中存储的数据编码,调制器接收由编码发生器编码后的信息,并通过天线电路将此信息发射/反射至阅读器。
数据写入时,由控制器控制,将天线接收到的信号解码后写入存储器。
通常电子标签应具有如下功能:
(1)具有一定容量的存储器,用以存储被识别对象的信息;
(2)在一定工作环境及技术条件下标签数据能被读出或写入;
(3)维持对识别对象的识别及相关信息的完整;
RFID技术在智能交通系统中的应刚仿真研究
(4)数据信息编码后,工作时可传输给阅凄器;
(5)可编程,且一旦编程后,永久性数据不能再修改;
(6)具有确定的有效使用期限,使用期限内无须维修;
(7)对于有源标签,通过阅读器能显示出电池的工作状况。
内部逻辑:
本设计选用电子标签L-PICK,内部结构如下:
电子标签L-PICK工作频率为433.92MHZ,通过微波与基站通信!
能够存储’606位数据,相当于82个7位ASCII字符和32位校验和.使用对环境无害的3VCR2032可替换钮扣锂电池供电。
电池寿命大于三年,发射数据速率为500-1khz。
接收数据速率为200HZ-300HZ。
该标签可通过基站进行格式化,阅读速度快,且同时可阅读多个标签。
车辆的有关信息存储在电子标签中,基站通过与电子标签进行通信来识别标签
并对车辆进行管理。
电子标签L-PICK不停地向基站发射数据!
只要在基站电磁波的范围内,标签信息均能够被基站接收。
标签反馈到基站的信息包括标签的唯一标志号、读/写标签的状态、信息的发送时间以及标签的数据域等。
电子标签的识别信息帧即包括上述标志号、状态、时间及数据域等。
信息帧的具体格式:
基站(RFID读卡器):
主要完成的任务:
(1)阅读器与电子标签通信的功能:
在规定的技术条件下阅读器与电子标签进行通信。
(2)阅读器与后端服务器通信的功能:
通过标准接口与后端服务器网络连接,并提供本阅读器的识别码、本阅读器读出电子标签的日期和时间、本阅读器读出的电子标签信息,以实现多个阅读器在系统网络中运行。
(3)有些应用系统的阅读器还具有以下功能:
能在读写区内查询多个电子标签,并能正确区分各电子标签;
适用于固定和移动对象;
能提示读写过程中的错误信息;
对于有源电子标签,能读出电子标签电池有关信息。
RFID读写器的选取:
采用ATR432P通信器,其工作频率为2.435MHZ-433.92MHZ,电磁兼容性符合欧共体ETSSII-ETS300220,输出功率最大可达10dbm,且可设置。
基站是本系统的核心部件,通过与主站的通信来管理和控制门禁系统的所有事务。
RFID中间件
通过串口与PC相连,接收基站发回的信息。
对接收的数据进行分析处理,并发送命令控制基站的动作,通过串口通信来实现计算机与主站和基站之间的实时信息传递,若有多个基站同一时间提交同一标签的信息。
则取距标签电磁距离最近的基站的信息帧为有效帧。
系统的基本配置(软件过程):
系统的扩展:
(1)外来车辆的管理:
对于临时用户(外来)车辆进入时,则由门卫值班人员进行功能管理。
当外来车辆进入到出口读卡器感应范围内时.由于读卡器不能感应到合法有效的电子标签,栏杆不会自动抬起,此时系统发出警报,提示门卫值班人员有外来车辆需要进入。
门卫值班人员则根据实际情况进行放行。
如果放行,则给该车发临时电子标签并进行登记车辆信息。
登记完后,卫门值班人员点击“放行”,栏杆自动抬起。
放行该车。
当该车开出到出口读卡器感应范围内时,读卡器判断电子标签是临时的,栏杆不会抬起.系统发出警报信息(收费),提醒门卫值班人员收回电子标签,由门卫值班人员手动控制栏杆抬起允许该车开出。
(2)防盗的管理:
采用双电子标签,一张固定在车的挡风玻璃上,另一张由车主手持,车通过门禁是必须是同时具备两张卡,如果只有一张则要被拦截,进行核实身份。
以防车被盗。
二、自动门控制系统设计
本文设计的自动门控制系统采用了如下设计方案:
采用按钮、无线遥控、红外感应三种驱动方式,既可自动控制又可人工控制,操作简单并且适用范围广;
采用EDA技术设计主控制器的状态转换,可软件诊错;
采用自动复位以及电机专用控制芯片来保证系统的可靠运行。
由于设计采用了EDA技术的VHDL设计而非传统的单片机设计,是一种自上向下的设计方法,使得系统的开发周期短、成本降低。
下文将详细介绍系统各个部分的设计。
1系统分析
本系统通过按钮、无线遥控、红外感应三种驱动方式实现自动门的开、关、停,且按钮优先级别最高。
红外感应开关在有人来时自动门开。
还可以通过人工控制方式使用按键与遥控器来控制自动门的开、关、停。
无线遥控器可根据实际情况在市场考查选用。
自动门主控制器电路用一片FPGA芯片,根据驱动信号以及位置和遇阻外部信号来完成对门运行状态的转换控制;
自动门的电机控制电路则根据主控制器发出的正反转以及停控制信号来控制电机的开、关、停以及实现自动门正反运行的分别调速。
2电机控制电路设计
为了保证电机的控制简便可靠,设计中使用了电机专用控制芯片MC33033如图1。
该芯片可对直流电机速度进行开环和闭环控制,亦可分别对电机正反转进行调速。
MC33033是第二代无刷直流电机控制器的典型芯片,该芯片内含转子位置译码器,并可为传感器工作提供带有温度补偿的参考基准电压。
MC33033的另一个特点是内含三个集电极开路的顶部驱动器和为MOSFET驱动电源而设计的三个高电流推拉式底部驱动器,并具有电机过流检测和保护功能。
MC33033应用到自动门的电机控制时,将逻辑运算电路得出的停止、正转、反转作为三个输入信号(优先级高低顺序是停止、正转、反转,正常情况下三个信号中有且仅有一个有效)。
正转和反转信号经过逻辑门接入MC33033的3端,如果该端为高电平时,MC33033将使AT输出高电平,同时CB端输出PWM调制波形,相应控制开关动作,从而实现电机正转并进行速度调整;
反之,MC33033将使AB输出高电平,同时CT端输出PWM调制波形,相应控制开关动作,从而实现电机反转并进行速度调整。
低电平时,停止信号接入到MC33033的19端(使能端),如果它为高电平时,芯片将停止正常工作,此时就能实现电机的停转。
这就是电机部分如何实现电机正转、反转、停止以及正反转分别调速的原理。
3基于FPGA的自动门主控制电路
用VHDL进行电子系统设计的优点是从上而下的设计方法,设计者不用考虑实际工艺,可以全心在思路设计上,这样更有利于系统的简单和实际应用。
3.1设计思路
首先画出自动门控制器的状态图。
分析自动门的运行过程可知:
门开始处于闭合状态,有开信号则开门,开关门过程中如遇到阻力则暂停一段时间,然后自动继续原来的开关门动作。
门在运行过程中遇到停信号以及起始位置(门关时)则停,遇到底(门全开时)位置信号则暂停一段时间,然后自动执行关门动作。
假设x1、x2、x3分别表示开、关、停控制信号;
x4表示门在运行过程中遇到障碍时传感器发出的信号;
x5表示门完全闭合;
x6表示门完全打开。
COUT为控制器内部的定计时控制信号(这里假定三个暂停状态的暂停时间一样)。
s0表示电动门处于零位置时的状态,此时电动门处于关闭的位置;
s1表示电动门开的状态、电机正转的情况;
s2表示电动门关的状态、电机反转的情况;
s3表示电动门停止时的状态,此时要求电机停止转动;
s4表示电动门处于底位置时的状态,此时电动门处于开的临界位置;
s5表示在反转过程中电动门在遇到障碍时的暂停状态;
s6表示在正转过程中电动门在遇到障碍时的暂停状态。
Z1、Z2、Z3分别表示控制器发给电机控制电路的开、关、停控制信号。
3.2自动门控制器的VHDL语言设计
(1)VHDL的实体描述:
LIBRARYIEEE;
USEIEEE.STD_LOGIC_1164.ALL;
ENTITYdoorIS
PORT(
Clk,reset:
INSTD_LOGIC;
--时钟和复位信号;
X1,x2,x3,x4,x5,x6:
OUTSTD_LOGIC;
--开关量;
Outputs:
OUT_LOGIC_VECTOR(1TO3);
Ten:
OUTSTD_LOGIC);
ENDdoor;
(2)主控组合进程部分程序
PROCESS(current_state,x1,x2,x3,x4,x5,x6)
BEGIN
CASEcurrent_stateIS
WHENso=>
comb_output<
=’001’;
en<
=’0’;
IFx1=’1’THENnext_state<
s1;
………………
ELSEnext_state<
s0;
ENDIF;
 升级会员
升级会员 