机械原理基本杆组分析法Word文件下载.docx
《机械原理基本杆组分析法Word文件下载.docx》由会员分享,可在线阅读,更多相关《机械原理基本杆组分析法Word文件下载.docx(23页珍藏版)》请在冰豆网上搜索。
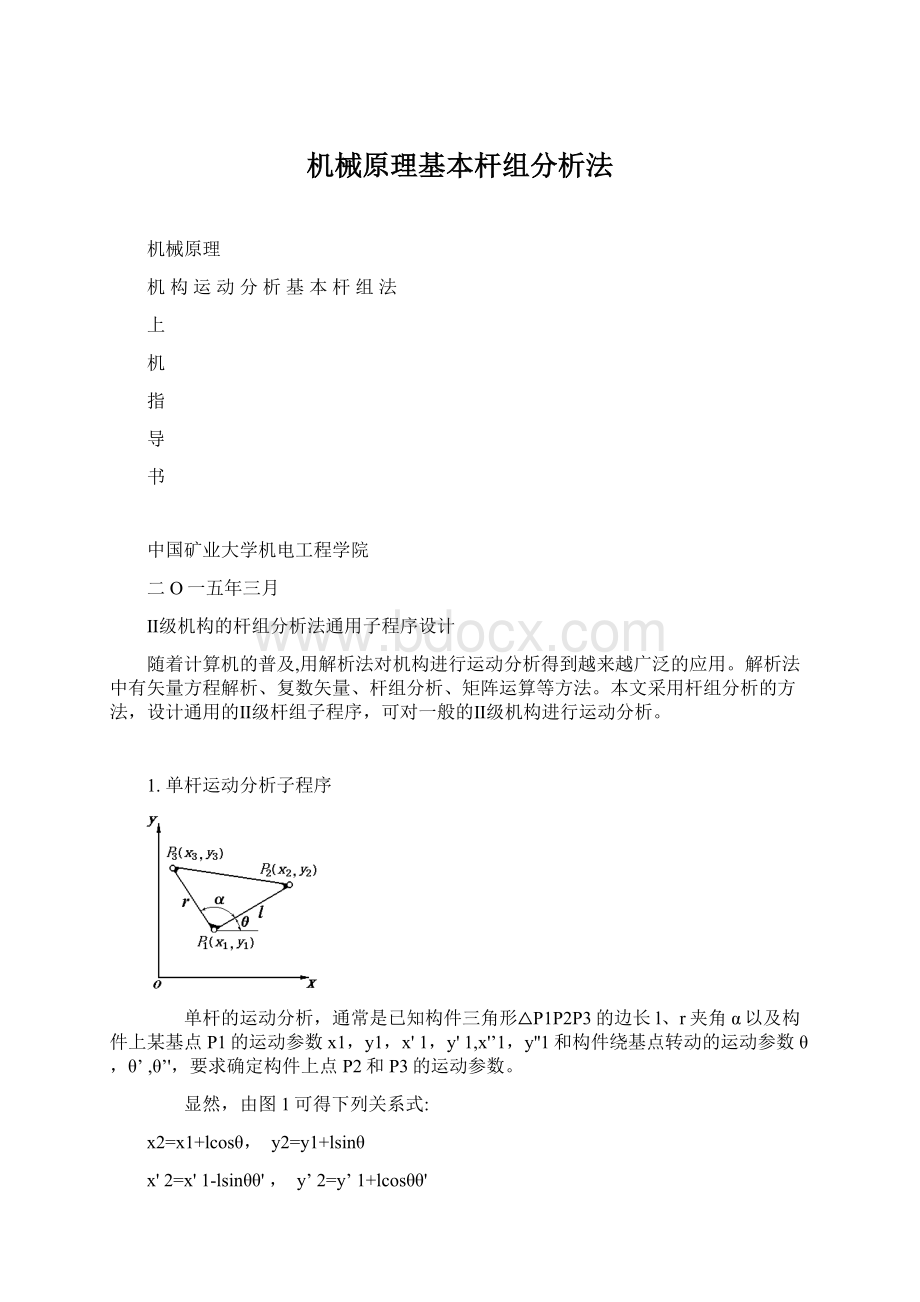
1—(y3-y1)θ’’-(x3-x1)θ’2,y'
’3=y’’1+(x3—x1)θ’’-(y3—y1)θ’2
由以上各式可设计出单杆运动分析子程序(见程序单)。
图1
2.RRR杆组运动分析子程序
图2所示RRRⅡ级杆组中,杆长l1,l2及两外接转动副中心P1,P2的坐标、速度、加速度分量为x1,x’1,x’’1,y1,y'
1,x2,x’2,x’’2,y2,y’2,y'
’2,要求确定两杆的角度、角速度和角加速度θ1,θ’1,θ’'
1,θ2,θ’2,θ’'
2。
1)位置分析
将已知P1P2两点的坐标差表示为:
u=x2—x1,v=y2—y1
(1)
杆l1及l2投影方程式为:
l1cosθ1—l2cosθ2=u
l1sinθ1-l2sinθ2=v
(2)
消去θ1得:
vsinθ2+ucosθ2+c=0(3)
其中:
c=(u2+v2+l22-l12)/2l2
解式(3)可得:
tan(θ2/2)=(v±
)/(u—c)(4)
式中+号和-号分别对应图2中m=+1和m=-1两位置.图2
由式
(2)可得:
tanθ1=(v+l2sinθ2)/(u+l2cosθ2)(5)
2)速度分析
对式
(2)求导一次得:
A1θ’1+A3θ’2=u’,A2θ’1+A4θ’2=v'
(6)
其中:
A1=-l1sinθ1,A2=l1cosθ1,A3=l3sinθ2,A4=-l2cosθ2
解式(6)可得:
ω1=θ'
1=(A4u'
—A3v'
)/D,ω2=θ’2=(A1v’-A2u’)/D (7)
D=A1A4-A2A3=l1l2sin(θ1—θ2)
3)加速度分析
对式(6)求导一次得:
A1θ’'
1+A3θ’’2=E,A2θ’’1+A4θ’’2=F (8)
E=u’'
+A2θ’12+A4θ’22,F=v'
’—A1θ’12—A3θ’22
解式(8)可得:
α1=θ’'
1=(A4E—A3F)/D,α2=θ’’2=(A1F-A2E)/D (9)
由上述式子可设计出RRR杆组运动分析子程序(见程序单).
3.RRP杆组运动分析子程序
图3所示RRPⅡ级杆组中,已知杆长l1及两外接点P1,P2的运动和移动副轴线P2P3的方向角变量(θ2,θ’2,θ’’2),P2点为以移动副与构件2相连的构件上运动已知的牵连点,要求确定运动变量l2,θ1,l’2,θ’1,l’’2,θ’’1.
由于θ2已知,l2待求,将式
(2)消去θ1可得:
l22+2(ucosθ2+vsinθ2)l2+(u2+v2-l12)=0
由此解得:
l2=-(ucosθ2+vsinθ2)±
(10)
式中+号用于转动副中心P3处在P2H线段之外(
图3中m=+1的位置),—号用于P3处在P2H线段
之内(图3中m=-1的位置)。
θ1由式(5)而定。
2)速度分析
对式
(2)求导一次得:
图3
A1θ’1+A5l'
2=G,A2θ’1+A6l’2=H(11)
A1,A2同前,A5=-cosθ2,A6=-sinθ2,G=u’+l2A6θ’2,H=v’-l2A5θ’2
解式(11)可得:
1=(A6G—A5H)/D8,l’2=(A1H-A2G)/D8 (12)
D8=A1A6—A2A5=l1cos(θ1—θ2)
3)加速度分析
对式(11)求导一次得:
A1θ’’1+A5l’'
2=E1,A2θ'
’1+A6l’’2=F1 (13)
E1=u’’+A2θ'
12+2A6l’2θ’2+l2A5θ’22+l2A6θ’’2
F1=v’’-A1θ'
12—2A5l’2θ'
2+l2A6θ’22—l2A5θ’’2
解式(13)可得:
1=(A6E1—A5F1)/D8,l'
2=(A1F1—A2E1)/D8 (14)
由上述式子可设计出RRP杆组运动分析子程序(见程序单).
4。
RPR杆组运动分析子程序
图4所示RPRⅡ级杆组中,已知杆长l1及两外接点P1,P2的运动,l1为P1点至导路的垂直距离,P2为过P2’与导路垂直延伸点,延伸距离为w(当P2与P1在导路同侧时,w取正,在异侧时,w取负),要求确定运动变量l2,θ1,θ2,l’2,θ’1,θ’2,l’’2,θ’’1,θ’’2.
1)位置分析
θ1与θ2的关系为:
θ2=θ1±
π/2(15)
式中+号和—号分别对应图4中m=+1和m=—1两
位置.
l1与l2有如下关系:
(16)
由式(4)和式(16)可得:
tan(θ2/2)=[v±
(l1-w)]/(u—l2)(17)
2)速度分析
由于θ’1=θ’2,引进符号θ’i(i=1,2),对
式
(2)求导一次得:
A7θ’i+A5l’2=u'
,A8θ’i+A6l'
2=v’(18)
A7=—(l1-w)sinθ1+l2sinθ2
A8=(l1-w)cosθ1—l2cosθ2图4
解式(18)可得:
ωi=θi=(A6u'
-A5v'
)/(—l2),l’2=(A7v’-A8u’)/(—12) (19)
3)加速度分析
对式(18)求导一次得:
A7θ'
’i+A5l'
’2=E2,A8θ’'
i+A6l’'
2=F2 (20)
E2=u’’+A8θ’i2+2A6l’2θ’i,F2=v’’-A7θ’i2—2A5l’2θ'
i
解式(20)可得:
αi=θ’'
i=(A6E2—A5F2)/(-l2),l’’2=(A7F2-A8E2)/(—l2) (21)
由上述式子可设计出RPR杆组运动分析子程序(见程序单),在子程序中,以+m代替前面各式中出现的±
计算符.m称之为型参数,在设计主程序时,应根据各类Ⅱ级杆组不同的布置型式,确定m的取值(m可取+1,—1和0)。
5.PRP杆组运动分析子程序
图5所示PRPⅡ级杆组中,已知导路1,2两外接点P1,P2的运动,h1,h2分别为未知运动点P3至导路1,2的垂直距离,导路1,2的方位角、角速度、角加速度(θ1,θ’1,θ'
2)均已知,要求确定导路1,2移动的位移、速度及加速度(l1,l2,l’1,l’2,l’’1,l’’2)以及P3点的运动(x3,x'
3,x’’3,y3,y’3,y’'
3)。
1)位置分析
推导l1,及l2的方程式:
x1+l1cosθ1+h1sinθ1=x2+l2cosθ2-h2sinθ2
y1+l1sinθ1-h1cosθ1=y2+l2sinθ2+h2cosθ2
整理得:
l1cosθ1-l2cosθ2=E1
l1sinθ1—l2sinθ2=F1(22)
E1=u-A3h1-A4l2,F1=v+A1h1+A2h2,
A1=cosθ1,A2=cosθ2,A3=sinθ1,A4=sinθ2.
由于θ1,θ2均已知,由此解得:
l1=(F1cosθ2—E1sinθ2)/D8
l2=(F1cosθ1—E1sinθ1)/D8(23)
其中:
D8=A2A3-A1A4=sin(θ1—θ2)
P3点的位置为:
x3=x1+l1cosθ1+h1sinθ1
y3=y1+l1sinθ1-h1cosθ1(24)
2)速度分析
对式(22)求导一次,整理得:
l'
1cosθ1-l'
2cosθ2=E2图5
l’1sinθ1-l'
2sinθ2=F2(25)
E2=u’+A6θ’1–A8θ’2,F2=v’-A5θ’1–A7θ'
2,A5=l1cosθ1+h1sinθ1,
A6=l1sinθ1—h1cosθ1,A7=l2cosθ2—h2sinθ2,A8=l2sinθ2+h2cosθ2。
由(25)解得:
l’1=(F2cosθ2-E2sinθ2)/D8
l’2=(F2cosθ1—E2sinθ1)/D8(26)
P3点的速度为对式(24)求导得:
x’3=x’1+l’1cosθ1+A6θ’1
y’3=y’1+l'
1sinθ1—A5θ’1(27)
3)加速度分析
对式(25)求导一次,整理得:
l’’1cosθ1-l’’2cosθ2=E3
l’'
1sinθ1—l’'
2sinθ2=F3(28)
E3=u’'
+2A3l’1θ’1+A5θ’12+A6θ’’1–2A4l’2θ’2–A7θ’22–A8θ'
2,
F3=v’'
—2A1l’1θ’1+A6θ’12—A5θ’’1+2A2l’2θ’2–A8θ’22+A7θ’’2。
解(28)式得:
l’’1=(F3cosθ2–E3sinθ2)/D8
l’'
2=(F3cosθ1–E3sinθ1)/D8(29)
P3点的加速度为对式(27)求导得:
x'
’3=x’’1+A1l’’1-2A3l’1θ'
1-A5θ'
12—A6θ’'
1
y’’3=y’’1+A3l’’1-2A1l’1θ’1-A6θ’12-A5θ'
’1(30)
由上述式子可设计出PRP杆组运动分析子程序(见程序单)。
6.RPP杆组运动分析子程序
图6所示RPPⅡ级杆组中,已知导路1参考点P1和外转动副P2的运动,h为外副P2至导路2的垂直距离,导路1的方位角、角速度、角加速度(θ1,θ’1,θ’’1)已知,导路1与导路2间的夹角为δ.要求确定导路1,2移动的位移、速度及加速度(l1,l2,l’1,l’2,l’’1,l’'
2)以及导路中心P3,P4点的运动(x3,x4,x’3,x’4,x’'
3,x’’4,y3,y4,y’3,y’4,y’’3,y’’4)。
推导l1,及l2的方程式:
x1+l1cosθ1+l2cos(θ1+δ)=x2+hsin(θ1+δ)
y1+l1sinθ1+l2sin(θ1+δ)=y2-hcos(θ1+δ)
l1cosθ1+l2cos(θ1+δ)=E1
l1sinθ1+l2sin(θ1+δ)=F1(31)
E1=u+A1h,F1=v–A2h,
A1=sin(θ1+δ),A2=cos(θ1+δ).
由于θ1,δ均已知,由此解得:
l1=(E1sin(θ1+δ)-F1cos(θ1+δ))/D8
l2=(F1cosθ1-E1sinθ1)/D8(32)
D8=A1A4—A2A3=sinδ,A3=sinθ1,A4=cosθ1图6
P3、P4点的位置为:
x3=x1+l1cosθ1,y3=y1+l1sinθ1
x4=x2+hsin(θ1+δ),y4=y2—hcos(θ1+δ)(33)
当给定P1、P2点的位置,杆长h的大小和导路的方向角θ1、δ后,RPP杆组可能有两种形式,即图6中的实线和虚线两种形式,这可用h为“+”(实线机构)和h为“-”(虚线机构)来确定。
此外,从式(32)可以看出,为保证机构能够正常运动,两导路之间的夹角δ不能为0,再考虑到加工和装配等因素以及摩擦的存在,工程实际中,一般要求∣sinδ∣>
0.1.
2)速度分析
对式(31)求导一次,整理得:
l’1cosθ1+l’2cos(θ1+δ)=E2
l’1sinθ1+l'
2sin(θ1+δ)=F2(34)
E2=u’+θ’1(A2h+A3l1+A1l2),F2=v’-θ'
1(A1h—A4l1-A2l2)。
由式(34)解得:
l’1=(E2sin(θ1+δ)-F2cos(θ1+δ))/D8
l'
2=(F2cosθ1-E2sinθ1)/D8(35)
P3、P4点的速度为对式(33)求导得:
x’3=x’1+A4l’1–A3l1θ’1,y’3=y'
1+A3l’1+A4l1θ’1
x'
4=x'
2+A2hθ'
1,y’4=y’2+A1hθ’1(36)
对式(34)求导一次,整理得:
l’’1cosθ1+l’’2cosθ2=E3
l’’1sinθ1+l’’2sinθ2=F3(37)
E3=u’’+θ'
’1(A2h+A3l1+A1l2)—θ’12(A1h—A4l1-A2l2)+2θ’1(A3l'
1+A1l’2)
+θ’’1(A1h-A4l1—A2l2)+θ’12(A2h–A3l1–A1l2)-2θ’1(A4l’1+A2l'
2)
解(37)式得:
l’’1=(E3sin(θ1+δ)—F3cos(θ1+δ))/D8
l’'
2=(F3cosθ1–E3sinθ1)/D8(38)
P3、P4点的加速度为对式(36)求导得:
x’'
3=x’’1+A4l’’1—A3l1θ’’1—2A3l’1θ’1–A4l1θ'
12
y’’3=y’’1+A3l’'
1+A4l1θ’’1+2A4l’1θ’1–A3l1θ’12
x’’4=x'
’1–A1hθ’12
y’’4=y’’2+A1hθ’’1+A2hθ'
12(39)
由上述式子可设计出RPP杆组运动分析子程序(见程序单)。
’'
机械原理平面机构运动分析子程序
(含单杆,RRR,RRP,RPR,PRP,RPP杆组)
PublicConstPI=3.1415926’定义常量
定义全局变量
PubliclAsSingle,l1AsSingle,lv1AsSingle,la1AsSingle
Publicl2AsSingle,lv2AsSingle,la2AsSingle
PublicrAsSingle,afAsSingle,dtAsSingle
PublicctAsSingle,cvAsSingle,caAsSingle
Publicct1AsSingle,cv1AsSingle,ca1AsSingle
Publicct2AsSingle,cv2AsSingle,ca2AsSingle
PublicuAsSingle,vAsSingle,u1AsSingle,v1AsSingle,u2AsSingle,v2AsSingle
Publicx1AsSingle,y1AsSingle,xv1AsSingle,yv1AsSingle,xa1AsSingle,ya1AsSingle
Publicx2AsSingle,y2AsSingle,xv2AsSingle,yv2AsSingle,xa2AsSingle,ya2AsSingle
Publicx3AsSingle,y3AsSingle,xv3AsSingle,yv3AsSingle,xa3AsSingle,ya3AsSingle
Publicx4AsSingle,y4AsSingle,xv4AsSingle,yv4AsSingle,xa4AsSingle,ya4AsSingle
’’定义中间变量
PublicwAsSingle
Publica1AsSingle,a2AsSingle,a3AsSingle,a4AsSingle
Publica5AsSingle,a6AsSingle,a7AsSingle,a8AsSingle
PubliccAsSingle,dAsSingle,d7AsSingle,d8AsSingle,h1AsSingle,h2AsSingle
PubliceAsSingle,e1AsSingle,e2AsSingle,e3AsSingle
PublicfAsSingle,f1AsSingle,f2AsSingle,f3AsSingle
PublicgAsSingle,hAsSingle,i1AsSingle
PublickAsSingle,k1AsSingle,k2AsSingle
PublicnAsSingle,n7AsSingle
PublicmAsInteger,kpAsInteger
’’'
’各公共子程序
’’单杆运动分析子程序
PublicSubSSL()
x2=x1+l*Cos(ct)
y2=y1+l*Sin(ct)
x3=x1+r*Cos(ct+af)
y3=y1+r*Cos(ct+af)
If(kp=1)Then
xv2=xv1—l*Sin(ct)*cv
yv2=yv1+l*Cos(ct)*cv
xa2=xa1—l*Sin(ct)*ca-l*Cos(ct)*cv*cv
ya2=ya1+l*Cos(ct)*ca-l*Sin(ct)*cv*cv
xv3=xv1-(y3—y1)*cv
yv3=yv1+(x3-x1)*cv
xa3=xa1—(y3-y1)*ca-(x3-x1)*cv*cv
ya3=ya1+(x3-x1)*ca-(y3-y1)*cv*cv
EndIf
EndSub
’’RRR杆组运动分析子程序
PublicSubRRR()
u=x2—x1
v=y2-y1
u1=xv2—xv1
v1=yv2-yv1
u2=xa2-xa1
v2=ya2-ya1
c=(u*u+v*v+l2*l2–l1*l1)/2/l2
k=v*v+u*u—c*c
If(k<
0)Then
MsgBox"
DYDACAN'
TBEASSEMBLED”,vbExclamation,”机械原理”
Else
n7=v+m*Sqr(k)
d7=u–c
If(Abs(d7〈0.0000001)Then
ct2=PI
Eles
ct2=2*Atn(n7/d7)
EndIf
If(d7〈0Andn7>
ct2=ct2+2*PI
Else
If(d7〈0Andn7<
ct2=ct2—2*PI
n=v+l2*Sin(ct2)
d=u+l2*Cos(ct2)
If(Abs(d〈0.0000001)Then
ct2=PI/2
ct1=Atn(n/d)
If(d〈0Andn>
ct1=ct1+PI
If(d〈0Andn〈0)Then
c1=ct1-PI
If(kp=1)Then
a1=-l1*Sin(ct1)
a2=l1*Cos(ct1)
a3=l2*Sin(ct2)
a4=—l2*Cos(ct2)
d=a1*a4—a2*a3
If(Abs(d)〈0。
000000001)Then
DYDAISINUNCERTAINTY"
,vbExclamation,”机械原理"
cv1=(a4*u1—a3*v1)/d
cv2=(a1*v1—a2*u1)/d
e=u2+a2*cv1*cv1+a4*cv2*cv2
f=v2—a1*cv1*cv1—a3*cv2*cv2
ca1=(a4*e—a3*f)/d
ca2=(a1*f-a2*e)/d
RRP杆组运动分析子程序
PublicSubRRP()
u=x2-x1
u1=xv2-xv1
u2=xa2—xa1
v2=ya2—ya1
k1=l1*l1-(u*Sin(ct2)—v*Cos(ct2))^2
If(k1〈
 升级会员
升级会员 