FANUCOIMATETD系统全参数表Word下载.docx
《FANUCOIMATETD系统全参数表Word下载.docx》由会员分享,可在线阅读,更多相关《FANUCOIMATETD系统全参数表Word下载.docx(38页珍藏版)》请在冰豆网上搜索。
0022
设定后台输入设备
设定后台输出设备
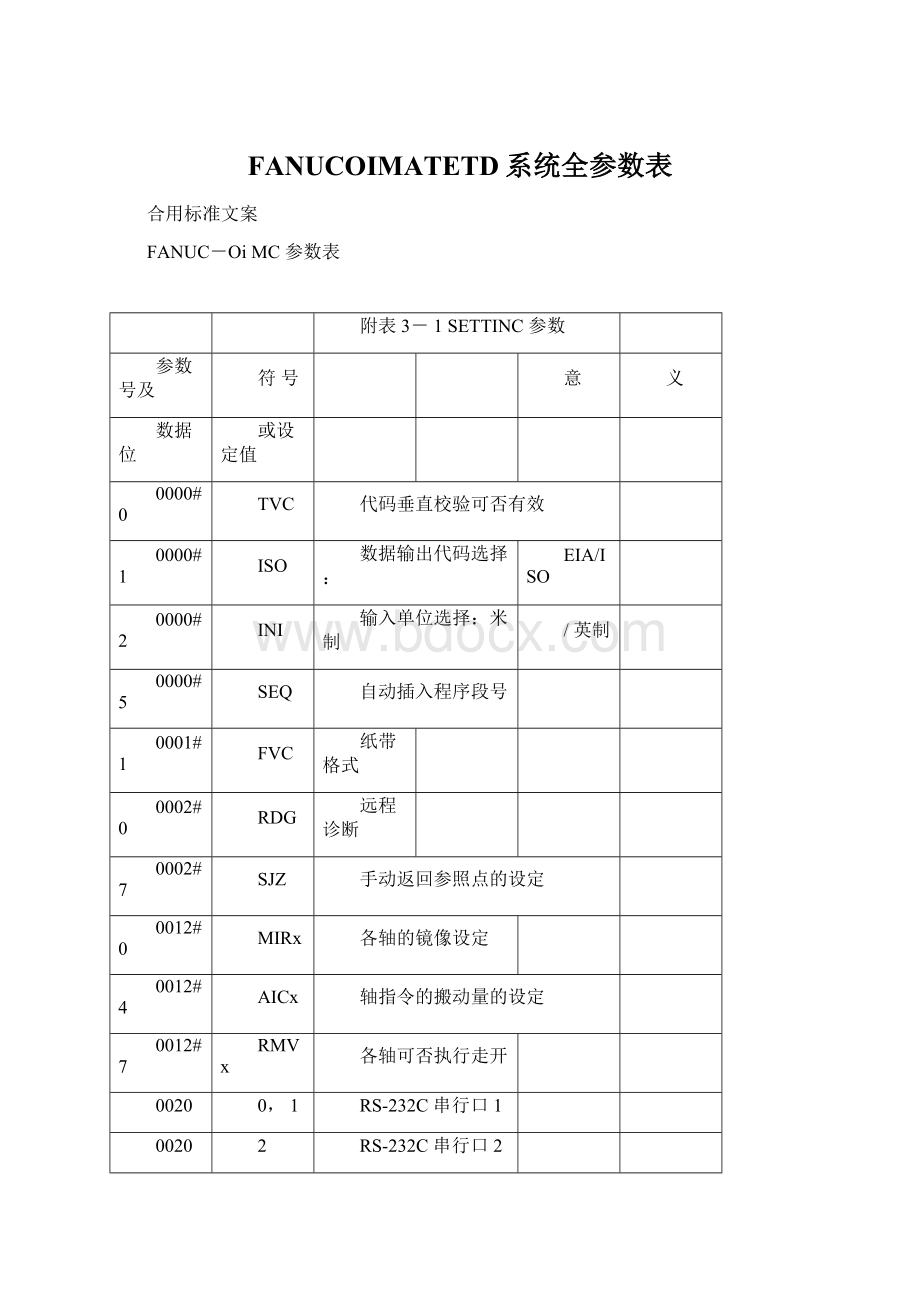
附表3-2通道共用参数
参数号
符号
意义
024
依照PMC在线监控画面的设定
1
RS-232C串行端口
1〔JD36A〕
2〔JD36B〕
高速接口〔HSSB(COP7)或以太网〕
11
高速接口或
RS-232串行端口
12
0100#1
CTV
程序说明局部文字的
TV校验
文档
0100#2
CRF
在ISO代码中EOB〔程序段结束〕的输出设定
0100#3
NCR
0100#5
ND3
在NDC运行时,程序读取方式
0100#6
IOP
规定如何停止输入
/输出程序
0100#7
ENS
读EIA代码时发现NULL代码〔无效代码〕时的设定
附表3-3DNC2接口的参数
0140#0
BBC
可否检查DNC2接口BCC〔程序段检查字符〕的值
0140#2
NCE
可否检查ER〔RS-232C〕和TR〔RS422〕信号
0140#3
ECD
可否应答错误代码的设定
0143
1~60
监控响应准时器的时间极限〔
DNC2接口〕
0144
监控EOT信号的准时器的时间极限〔
0145
RECV和SEND切换所需要的时间〔
0146
1~10
系统试一试保持通讯的时间〔
0147
系统发送的响应
NAK信号的信息的次数〔DNC2接口〕
0148
10~255
超时时可以接收的字符数目〔
0149
80~256
通讯包数据段的字符数〔
附表3-4有关远程诊断的参数
符号或
设定值
RDN
远程诊断可否进行
0201#0
SB2
停止位的设定
0201#1
ASC
数据输出时的代码
0201#2
EOB的输出
0203
1-12
波特率
0204
0-2
远程诊断通道
0211
1~99999999
远程诊断密码〔口令〕
0212
0213
3
0221
远程诊断要点字
0222
0223
0300#0
PMC
在CNC画面显示功能有效时,当
NC侧拥有储藏卡接口时
〔HSSB连接〕
附表3-5数据效劳器的参数
0900#0
DSV
数据效劳器功能可否有效
0900#1
ONS
当数据效劳器的文件名
O号和NC的O号不相同时
0921
选择数据效劳器主机
1的操作系统
0922
2的操作系统
0923
3的操作系统
0924
0~255
DNC1/Ethernet或FOCAS/Ethernet的等待时间设定
0931
32~39
设定对应软健[CHAR-1]的特别字符代码
0932
设定对应软健[CHAR-2]的特别字符代码
0933
设定对应软健[CHAR-3]的特别字符代码
0934
设定对应软健[CHAR-4]的特别字符代码
0935
设定对应软健[CHAR-5]的特别字符代码
附表3-6轴控制、设定单位的参数
1001#0
INM
直线轴的最小搬动单位
1002#0
JAX
JOG进给、手动快速进给及手动返回参照点时,同时控制的
轴数
1002#1
DLZ
无挡块参照点设定功能可否无效
1002#2
SFD
可否使用参照点偏移功能
1002#4
XIK
非直线插补型定位时,对定位搬动中的某个轴实行互锁时
1002#5
IDG
当使用无挡块设定参照点功能时,
可否进行禁止参照点再设
定参数IDGx(No.1012#0)的自动设定
1004#0
ISA
最小输入单位,最小指令增量
1004#1
ISC
1004#6
IPI
英制输入控制
1004#7
IPR
各轴的最小输入单位可否设定为最小指令增量的
10倍
1005#0
ZRNx
参照点没有成马上,在自动运行〔
MEM,RMT或MDI〕中,指
定了除G28以外的搬动指令时,系统可否报警。
1005#1
DLZx
无挡块参照点设定功能可否有效
1005#3
HJZx
当参照点已经建立再进行手动参照点返回时采用减速挡块
1005#4
EDPx
各轴正方向的外面减速信号
1005#5
EDMx
各轴负方向的外面减速信号
1006#0
ROTx
设定直线轴或旋转轴
1006#1
ROSx
1006#3
DIAx
设定各轴的搬动量
1006#5
ZMIx
设定各轴返回参照点方向
1007#0
RTLx
旋转轴返回参照点操作
1007#1
ALZx
自动返回参照点操作
1007#2
OKIx
对于机械撞块式设定参照点操作在参照点返回完成后,
可否
出现P/S000报警
1008#0
ROAx
设定旋转轴的循环显示功能可否有效
1008#1
RABx
设定绝对指令时轴的旋转方向
1008#2
RRLx
相对坐标值
对于循环显示功能有效的旋转轴在使用机床系选择〔
G53〕
1008#5
RMCx
或高速机床坐标系选择〔G53P1〕指令时,参数1008#1可否
有效
1010
1,2,3,
CNC控制轴数
1012#0
IDGX
无挡块设定参照点时,可否再次设定参照点
1015#3
RHR
在切换增量系〔公/英制〕后,对于旋转轴第一个
G28指令,
参照点返回速度种类
1015#4
ZRL
对于高速型参照点返回指令
G28,第二到第四参照点返回指
令G30和G53指令,定位种类可否为直线插补型
1015#5
SVS
在关断某伺服轴后,简单同步控制可否释放
1015#6
WIC
工件原点偏置测量值直接输入可否对坐标系有效
1015#7
DWT
用P指定暂停时间时,数据单位为
0.1或1ms
1020
各轴的编程名称
1022
0~7
根本坐标系中各轴的属性
1023
1,2,3
各轴的伺服轴号
附表3-7坐标系的参数
1201#2
ZCL
手动参照点返回完成后,局部坐标系可否取消
1201#5
AWK
改变工件零点偏移量时可否改变绝对地址显示
1201#7
WZR
复位时工件坐标系可否返回到
G54
1202#0
EWD
外面工件原点偏移量引起的坐标系的搬动方向
1202#1
EWS
工件坐标系搬动量与外面工件
1202#2
G50
指令了坐标系
G50代码时,可否报警
1202#3
RLC
复位后,局部坐标系可否取消
1202#5
SNC
在清除伺服报警后,局部坐标系可否去除
1203#0
EMC
扩展型外面机床原点偏移功能可否有效
1203#2
68A
双刀架镜像方式
G68中绝对地址检测器自动坐标系设定是
否考虑双刀架镜像
1203#6
MMD
在手动操作中,对于镜像功能见效的轴其运动方向可否与自
动运行方向相同
1220
-99999999
外面工件原点偏移量
~99999999
1221
工件坐标系
1〔G54〕的原点偏移量
1222
1〔G55〕的原点偏移量
1223
1〔G56〕的原点偏移量
1224
1〔G57〕的原点偏移量
1225
1〔G58〕的原点偏移量
1226
1〔G59〕的原点偏移量
1240
机械坐标系中各轴第
1参照点的坐标值
1241
2参照点的坐标值
1242
3参照点的坐标值
1243
4参照点的坐标值
1260
1000~
设定旋转轴每一转的搬动量
9999999
1280
0~65535
扩展外面机床原点偏移信号组的首地址
1290
0~99999999
设定镜像方式双刀架距离
附表3-8储藏行程检测的参数
1300#0
OUT
用参数〔No.1322,No.1323〕设定的储藏式行程检测
2的禁
地域为内或外侧地域
1300#2
LMS
储藏式行程检测切换信号
EXLM可否有效
1300#5
RL3
行程检测3清除信号RLSOT3可否有效
1300#6
LZR
接通电源后到手动回参照点从前,可否进行第一储藏式行程
检测
1300#7
BFA
当发出超出储藏行程的指令时可否出现报警
1301#0
DLM
各轴各向储藏式行程限位切换信号可否有效
1301#2
NPC
作为搬动前行程检测功能的一局部,由
G31〔跳转〕和G37
〔自动刀具长度测量〔
M系列〕或自动刀具补偿〔
T系列〕
〕指定的搬动程序段
1301#3
OTA
若是在上电时刀具已处于禁止地域,有关储藏行程检测
〔内侧〕和储藏行程检测
3的报警何时发出
1301#4
OF1
若是出现超程报警后〔行程检测
1超程〕,机床搬动至赞同
范围内时,报警可否取消
1301#6
OTF
当出现超程报警时可否输出信号
1301#7
PLC
搬动前行程检测可否执行
1310#0
OT2x
每个轴可否进行储藏式行程检测
2的检查
1310#1
OT3x
3的检查
1320
各轴储藏式行程检测
的正方向界线的坐标值
1321
的负方向界线的坐标值
1322
1323
1324
1325
1326
II
1327
附表3-9进给速度的参数
1401#0
RPD
从接通电源到返回参照点期间,手动
2快速运行
1401#1
LRP
定位〔G00〕
1401#3
JZR
用JOG速度手动返回参照点
1401#4
RFO
切削进给倍率为0%时,快速搬动
1401#5
TDR
螺纹切削或2攻丝〔攻丝循环
G74或G84,刚性攻丝〕期间
空运行
1401#6
RDR
对快速运行指令,空运行
1402#0
1402#2
JOV
JOG倍率
1402#4
JRV
手动进给或增量进给
1403#0
MIF
每分钟进给损时的F指令〔切削进给速度〕的最小单位为
RTV
螺纹切削循环刀具回退时倍率
1404#0
HFC
螺旋差给进给速度
1404#1
DLF
参照点建立后,进行手动返回参照点时
1404#2
F8A
每分进给时的
F指令范围〔T系列的情况〕
每分进给时带小数点的
F指令范围〔M系列的情况〕
1404#3
FRV
英制输入时每转进给的
进给速度指令范围
1404#4
HCF
在AI轮廓控制〔M系列〕中,螺旋线插补的速度为
1404#7
FC0
在自动运行中,当程序段〔
G01,G02,G03等〕中含有的进给
速度指令〔F指令〕为0时
1405#0
F1U
指定F1位数进给的进给速度参数〔No.1451-1459〕的数据
的数据单位
1405#1
FD3
每转进给的进给指令〔
F指令〕中小数点后位数
1405#5
EDR
对于插补型快移〔参数
No.1401#1〔LRP〕=1〕,外面减速速
度为
1405#6
FCI
设定了英制输入和每转进给时,切削进给的钳制速度为
1406#0
ED2
外面减速速度
1406#1
ED3
1407#3
ACS
在包括Cs轴执行直线插补型位定位时,若是Cs轴未完成参
考点返回
1407#7
ACF
在AI先行控制方式或
AI轮廓控制方式时,钳制进给速度为
1408#0
RFD
旋转轴进给速度的控制方法
1410
空运行速度
1411
接通电源时自动方式下的进给速度
1420
各轴快速搬动速度
1421
各轴快速搬动倍率的
F0速度
1422
最大切削进给速度〔所有轴通用〕
1423
各轴手动连续进给〔
JOG进给〕时的进给速度
1424
各轴手动快速搬动速度
1425
各轴返回参照点的HL速度
1426
切削进给时的外面减速速度
1427
各轴快速搬动的外面减速速度1
1428
参照点返回速度
1430
各轴最大切削进给速度
1431
先行控制方式中的最大切削进给速度〔所有轴通用〕
1432
先行控制方式中每个轴的最大切削进给倍率
先行控制方式,AI先行控制方式或
AI轮廓控制方式中每个
轴的最大切削进给速度
1436
速度检查功能中各轴最高速度
1440
切削进给外面减速速度
1441
各轴搬动外面减速速度
1442
各轴手轮进给最高速度
1443
1444
各轴快移外面减速速度
1445
1450
F1位数进给时手摇脉冲发生器每一格的进给速度的变化量
1451
对应F1位数指令F1的进给速度
1452
对应F1位数指令F2的进给速度
1453
对应F1位数指令F3的进给速度
1454
对应F1位数指令F4的进给速度
1455
对应F1位数指令F5的进给速度
1456
对应F1位数指令F6的进给速度
1457
对应F1位数指令F7的进给速度
1458
对应F1位数指令F8的进给速度
1459
对应F1位数指令F9的进给速度
1460
F1位数指令的进给速度的上限值〔
F1-F4〕
1461
F5-F9〕
1465
0~99999999
旋转轴进给速度控制的虚假半径
1466
螺纹切削循环回退速度
附表3-10加减速控制的参数
 升级会员
升级会员 