机电一体化2AdocWord格式.docx
《机电一体化2AdocWord格式.docx》由会员分享,可在线阅读,更多相关《机电一体化2AdocWord格式.docx(29页珍藏版)》请在冰豆网上搜索。
然而这个框图内尚缺少过象限判断,这个工作留给学生去完成。
图6.5第一象限顺时针园弧插补程序框图
2。
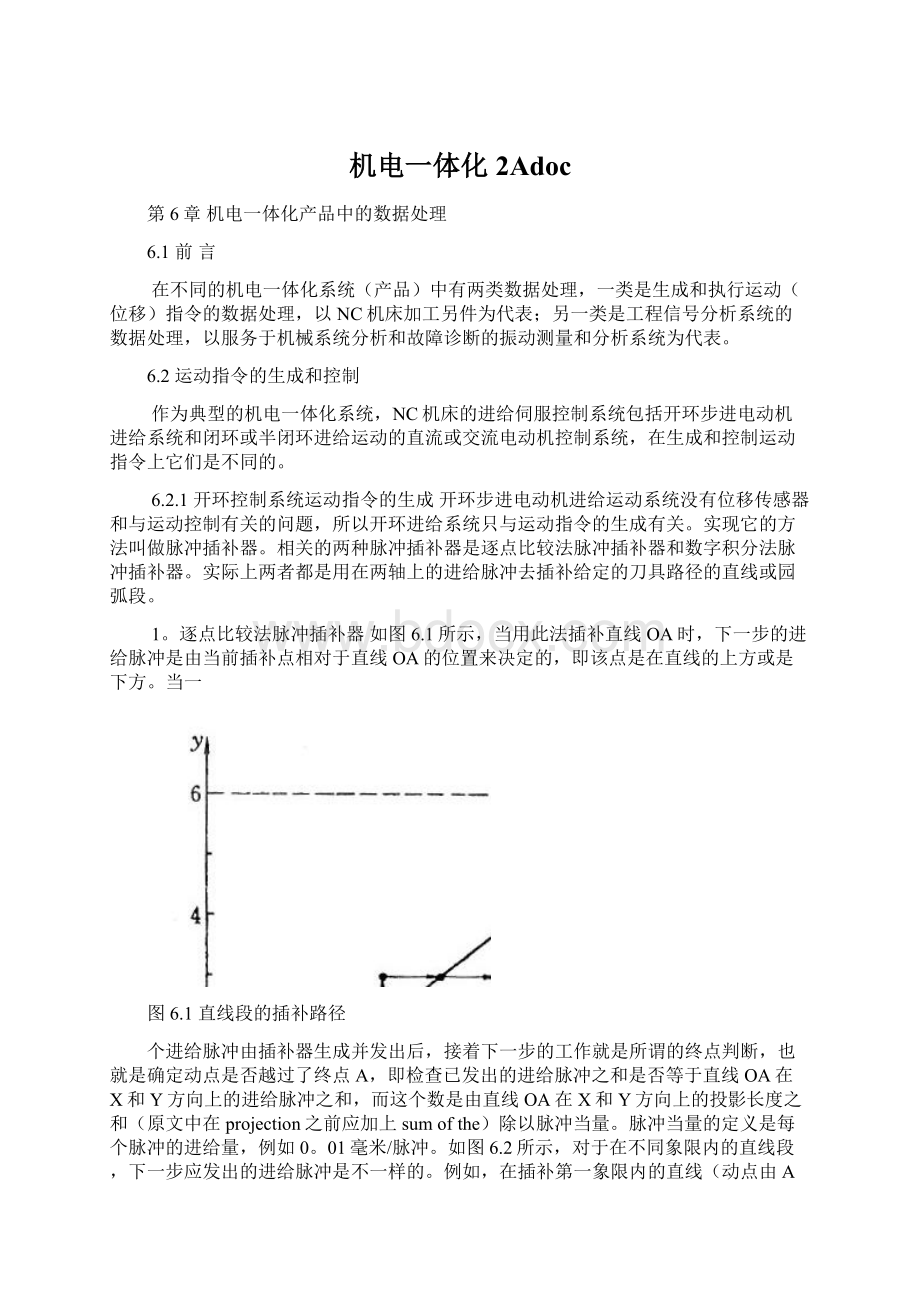
数字积分法脉冲插补器(DDA插补器)这种插补器采用在一个插补间隔内的数字速度积分来确定在每轴上的刀具位移,从而引导刀具沿着要求的曲线运动。
如图6.6所示,在加工时刀具必须保持其运动方向在任何点处都切于该曲线。
设在点P处的切线与X轴的夹角为,刀具速度为V,则V在X和Y轴上的速度分量为
刀具在X轴上的位移为对VXdt和VYdt的积分,即
图6.6DDA插补原理
该式也可用数字求和来表示,即
这里t是积分(时间)间隔。
为方便计算,将X和Y皆乘以一比例系数q,并分别用SX和SY来表示,即
Sx=Xq=Vtqcos
Sy=Yq=Vtqsin(6-1)
令Fx=Vtqcos
Fy=Vtqsin
该式可简化为、
Sx=Fx
Sy=Fy(6-2)
这里FX和FY称为积分函数。
(6.1)式表明SX或SY是刀具位移的q倍,对q的选择应使得积分函数为一常数或一单值函数,从而简化插补计算。
插补的过程是,首先确定积分函数,例如,最简单的积分函数对于直线段为FX=Ya和FY=Xa,Xa和Ya是直线终点的两个坐标值(图6.7);
而对园弧段则为FX=Ya和Fy=Xa,Xa和Ya是在园弧上动点的坐标值(图6.8)。
在插补时,按(6.2)式进行积分。
如果积分SX或SY大于q,这表明在X或Y轴上所计算到的位移X或Y已大于一个脉冲当量,则刀具应在X或Y坐标上走一步。
对直线插补,q必须满足q>
=max(Xa,Ya).对园弧插补,q必须满足q(Xa,Ya,Xb,Yb).这个过程能保证刀具沿被加工曲线运动。
图6.9和图6.10分别为直线和园弧插补的程序框图。
图6.7用DDA法插补直线
图6.8用DDA法插补园弧
图6.9用DDA法插补直线的程序框图
图6.10用DDA法插补园弧的程序框图
数字积分法脉冲插补器能广泛地用于各种平面或空间曲线,只要曲线的切线易于获得。
数字积分插补器的另一名称是DDA(数字微分分析器),这似乎与实际的积分相反而难于理解。
6.2.2用于闭环控制系统的数字增量式脉冲插补器
数字增量式脉冲插补器亦称数字采样插补器,图6.11所示为其方块图。
闭环进给控制系统采用两个微机:
前面一个称为插补计算机,用以完成插补;
后面一个称为控制计算机,用以完成系统的闭环控制。
图6.11数字增量式插补器方块图
数字增量式插补器的输出不再是单个脉冲,而是一个表示许多脉冲当量的数值,亦称指令位移增量,并在X和Y轴上记以X和Y。
所以X和Y是一段轮廓曲线(直线或园弧)的两个增量如图6.12和6,13所示。
因此,数字增量插补器是执行用直线段来逼近被插补曲线的一个过程。
图6.12用数字增量插补器插补直线
图6.13用数字增量插补器插补园弧
控制计算机一方面接受第i个采样间隔的指令位移增量Xi(Yi),,另一方面还接受由位移传感器反馈回来的实际位移Xa,Ya,所以位移差Xe和Ye由下式表示,即
此处Xi是第ith个采样间隔的位移增量,而Xa是第i个采样点的绝对位移。
然后,Xe由ADC电路转换为指令电压并传送至伺服电路以控制伺服电动机的转速,所以电动机的转速正比于位移差值Xe.这样,可以通过连续地调节两个伺服电动机的转速来消除Xe和Ye,从而控制刀具沿要求的曲线精确地运动。
如此,插补计算机产生所要求的位移指令为
对于直线,l是长度为l的直线的均匀分段长度,是该直线与X轴的夹角。
对于园弧,则有
如果是一很小的量,sin和cos可近似地由下式表示
于是插补计算机的指令位移增量输出为
同理
或
(6-3)
关于控制计算机如何根据X和Y控制伺服系统以完成运动控制,将在第8章中讨论。
6.3信号分析系统
信号分析系统是另一种数据处理软件系统,它接受从传感器和数据获取系统传送过来的输入数据,然后处理这些数据而得到一些参数作为系统分析、设计和诊断的基础。
有两种方法处理离散采样数据:
一种是在时域和频域内直接分析这些数据以得到一些说明系统特性的参数作为系统分析和诊断的基础;
另一种是先用采样数据建立系统的统计模型,即所谓的系统建模或系统识别,在数学上该模型是一差分方程。
然后用得到的系统参数,包括系统阶数和系数,做建模后分析,包括系统稳定性分析、模态分析、谱分析和系统预报等。
建模后分析的结果用于系统分析、设计、诊断和预报控制。
图6.14直接用离散采样数据的信号分析系统方块图
图6.15基于建模和建模后分析的信号分析系统方块图
下面是有关的计算公式
6.3.1自相关函数
(6-4)
式中是相关步数
6.3.2相关函数
(6-5)
6.3.3离散傅里叶变换算法
(6-6)
式中
是数据序列,H是傅里叶变换符号,
表示一指数函数,是角频率,是采样间隔
6.3.4频谱分析频谱
一般是一个实变数的复变函数,可用实、虚部的组合表示为
和
(6-7)
取
或
为纵坐标,为横坐标来作频谱图,称其为信号的幅频谱和相频谱。
将
离散化并对
作离散傅里叶变换(DFT),就得到信号的离散功率谱,即
(6-8)
6.3.5相干函数它的定义是
(6-9)
当
时,输出信号Y(t)与X(t)无关;
时,表示Y(t)与X(t)完全相关;
表示Y(t)是X(t)和其他输出(例如噪声)的组合。
6.3.6系统建模
系统模型在数学上是一差分方程,也是一回归方程。
对于单输入、单输出(SISO)系统如图6.16所示,它可表示为
(6-10)
图6.16SISO系统
式中a0,a1,a2…….an,b0,b1,…….bm是系统的系数;
m,n是系统的阶数;
q是输出的时间滞后拍数。
方程(6.10)可解释为:
系统输出的当前离散值是输出和输入的两个离散时间序列历史值的线性组合。
因为输出的时间序列{Y}一般是可用传感器测量的,而输入时间序列{X}则往往是不可测的,甚至是不可知的。
这样,式(6.10)只好简化为自回归方程,即
(6-11)
式中B是一时间后移算子,at是白噪声,
而
(6-12)
是系统模型的特征方程,它可用下列的连乘式来表示,即
(6-13)
是特征方程的一对共轭复根,是连乘符号。
6,3,7建模后分析
模型参数计算可以证明
与系统的模态参数阻尼率j和自然频率
有关,并可表示为
(6-14)
(6-15)
式中是采样间隔。
该式表示可由一对共轭复根
得到一对模态参数j和
。
2。
功率谱分析功率谱函数可表示为
(6-16)
是at的方差,即
(6-17)
式中N是样本长度,n是系统的阶数。
6.4信号分析实例
例1。
车辆座椅的振动分析(图6.17)
在车辆行驶中,如有一个座椅发生剧烈振动,其振源可能是四个车轮。
为了消除振动,需要找出对该座椅的振动能量贡献最大的车轮。
为此将振动测量的传感器装在该座椅及四个车轮轴端上,然后将该座椅和四个车轮的振动测量信号传送至计算机作相关分析。
在综合相关曲线上,可以看出每个车轮对座椅振动的影响。
从相关函数的性质可知,当两个输入、输出信号之间有一特定的时间位移时,它们的相关性成为最大,且在相关曲线上会有一相应的峰值。
选择最高的峰值结合对应的,就可以确定后轮对座椅的贡献最大。
图6.17车轮振动信号的测量和相关分析系统
例2。
图6.18所示为一从汽车齿轮箱测得的振动加速度信号的功率谱图。
a图是在正常工作状态时的输入-输出信号的互功率谱图;
b图是非正常工作情况的互功率谱图。
在正常工作状态时,功率谱曲线是保持不变的。
当它在某处发生改变时,就说明在轴承或齿轮的啮合中必有某种故障发生,或轴的转动不平衡等。
B图显示在频率为9。
2赫和18。
4赫处有两个谱峰,但在a图中于相同频率处却没有谱峰。
这就说明了在齿轮箱中有故障发生。
此外,指示非正常功率消耗的频率也提供了寻找故障源的依据。
图6.18齿轮箱的振动信号的功率谱
例3。
相干函数的应用:
估计输出信号的(自)功率谱与输入信号的关系程度
图6。
19表示两个信号的自功率谱和相干函数:
一个是柴油机油泵的油压脉动信号;
另一个是油管振动信号。
因为油泵转速为n=781转/分,油泵齿数z=14,故油压脉冲信号X(t)的基频为
Hz,
而图a所示的自功率谱SX(f)表明除了基频以外,在第2,3,4阶谐频处也有谱峰出现。
同时,图6.19b所示为由油管测得的振动信号Y(t)的自功率谱S(f).,取这两个功率谱作相干分析,并得到相干函数曲线如图6.19c所示。
它表示在f=f0处,
;
f=2f0处,
处,
;
f=4f0处,
.这表明由油压脉动信号产生的相应于各阶谐频处的相干函数值都比较大而对应于非谐波频率处的相干函数值则非常小,所以油管的振动基本上是由油泵的油压脉冲所引起的。
图6.19油压脉动和油管振动信号的相干分析
a.
例4。
滚珠轴承的在线监测和故障诊断
滚珠轴承的监测和故障诊断一直是机械故障诊断的一个重要方面,这是因为许多旋转机械的故障与轴承有关。
目前轴承的故障诊断方法有:
用B&
K等公司开发的简单仪器如2511型测振仪测量振动参数的大小,这些参数包括位移、速度和加速度。
日本开发的NB-3型轴承监视器采用压电晶体传感器测量振动加速度的峰值以监视轴承的工作状态。
基于FFT的便携式信号分析仪如IRD820振动脉冲能量分析仪(美国)和CF300分析仪(日本),后者是所谓的世界上最小的信号分析仪,它能作谱分析和概率密度函数计算等。
3。
国内某大学研究的滚珠轴承的在线自动检测和故障诊断系统(图6.20),该系统分两步工作,第一步是监测,其中采用一个NRSS指标,即残余误差平方和监测是否有任何故障产生,如果有则系统自自动转入第二步去分析以确定产生了何种故障。
现介绍如下:
如前所述,时间序列的ARMA(n,m)模型为
图6.20滚珠轴承的故障诊断系统
其中at是残差,N个数据的样本at序列的方差为
为了使at只描述信号模式的变化而与信号强度无关,引入了规一化的残差平方和作为故障判据的指标,即
式中V(xt)是xt序列的方差。
在应用中当NRSS超过预设值,它表示轴承有某种故障,系统就转入诊断并采用规一化功率谱密度函数
来作故障诊断。
式中是采样间隔,r0是Xt的自相关值。
作为实例,用实验数据建立了一个适合模型ARMA(8,7),即
此模型的人工(仿真)的工作状态列于表6.1
表6.1模型的仿真工作状态
No.
状态
At
NRSS
1
正常
0.559
0.0129
2
0.471
0.0172
3
球破损
0.62
0.05
4
外圈滚道破损
0.496
0.038
5
外圈和内圈滚道破损
0.443
0.052
6
内圈滚道破损
0.177
0.120
7
严重的球破损
1.172
0.542
由此表可看出,当NRSS值达到0。
05时将发生某种破损。
为了识别故障源,需要用下列公式计算轴承元件的工作频率
轴的回转频率fr=N/60,N是每分种转数
滚珠通过外圈一点的频率
滚珠通过内圈一点的频率
滚珠绕自身转动的频率
滚珠隔离器的频率
其中N——轴的转速(转/分)
D——滚珠直径
D——轴承的节园直径
-——接触角
n——滚珠数
根据这些计算公式算出fr=30HZ,fO=80HZ,fi=144HZ,fb=213HZ.它们在S(f)上所对应的谱峰分别表示为轴承的不平衡运动;
外圈滚道缺陷;
内圈滚道缺陷和球缺陷,而在高频范围(400~800HZ)内的谱峰说明球隔离器的松动或过度磨损引起的点蚀。
例5。
盒式磁带录音机机芯的动特性的频谱分析和诊断
盒式录音机机芯的动特性的主要指标是抖晃率,其定义是磁带的瞬时速度误差V与磁带的平均速度之比。
它是由于在设计、制造和装配机芯时的不良所带来的。
开发了一种用时间序列频谱分析系统来诊断机芯的运动误差,其中抖晃率信号的采样时间序列用来拟合AR(n)模型,进而作出自回归功率谱为
按照对AR功率谱图上谱峰的分析,就可以诊断出抖晃源,在机芯中的产生抖晃误差的零件,以及它们对抖晃误差的贡献,从而提出改善盒式录音机质量的依据。
图6.21所示为CM100B型盒式录音机的机芯的传动系统,机芯的各个零件的工作频率列于表6.2中。
图6.21CM100B型盒式录音机的
表6.2机芯零件的工作频率
零件名称
过渡轮
绕带轮
中间轮
带
张紧
惯性轮驱动轴
小带轮
频率
(hz)
1.15
1.33
2.46
4.30
10.19
7.66
图6.22和图6.23分别给出FFT谱和AR谱。
表6.3和6.4分别列出了FFT谱分析和AR谱分析的结果。
图6.22CM100B机芯的抖晃信号的FFT谱
图6.23CM100B机芯的抖晃信号的AR谱
表6-3CM1000B机芯的FTT谱分析结果
1.17
4.10
7.79
9.95
20.48
22.62
29.84
32.37
40.36
百分比
7.15
16.97
12.90
12.44
9.73
8.70
9.30
9.37
11.64
贡献零件的频率
过渡轮一阶频率
传动带一阶频率
传动轴的一阶频率
张紧轮一阶频率
张紧轮二阶频率
驱动轴的三阶频率
张紧轮三阶频率
传动带的三阶频率
小带轮的一阶频率
表6-4CM10000B机芯的AR谱分析结果
频率hz
0.9
4.2
7.8
9.9
11.7
14.9
20.2
24.6
30.2
35.2
40.6
0.73
15.98
3.61
9.69
3.8
10.5
3.07
6.78
3.18
3.28
28.9
过渡轮的一阶频率
传动带的一阶频率
驱动轴的一阶频率
张紧轮的一阶频率
张紧轮的二阶频率
带的三阶频率
驱动轴的二阶频率
张紧轮的三阶频率
带的6阶频率
驱动轴的5阶频率
例6机床传动误差的确定
图6.24Y38-1型滚齿机分度链的传动系统
图6.24表示Y38-1型滚齿机分度链的传动系统。
用GD-18型惯性仪测量回转均匀度误差以拾取传动链的短周期误差。
用所获得的误差数据建立了ARMA(19,15)误差模型,根据此模型参数得到了ARMA功率谱,由此谱图确定了主要误差源以及它们对整个误差能量的贡献。
即:
分配蜗轮55.3%;
弧齿齿轮2822.7%;
弧齿齿轮2419.8%;
E8180型轴承26。
7%;
齿轮副95/909.5%以及滚刀24%。
确定传动误差源和相应的误差贡献对实际检查和控制质量,指导维修,降低停机时间和保证机床的完好率有重要意义。
第7章进给运动的伺服控制系统
7.1引言
数控机床进给运动的伺服驱动控制系统包括步进电动机驱动的开环控制系统和直流/交流伺服电动机驱动的闭环或半闭环伺服控制系统。
控制系统是闭环或半闭环决定于采用何种位移传感器以及将它们安装在何处。
闭环控制系统采用直线位移传感器如长光栅并将它安装在导轨和直线移动的溜板上;
而半闭环控制系统则采用角位移传感器如旋转变压器或编码器并将它安装在旋转的丝杠上,但在控制系统中不包括溜板-导轨副。
7.1.1开环控制系统
.图7,1所示为步进电动机开环进给运动控制系统的组成,它包括驱动电路和步进电动机。
控制系统的输入是由计算机运动控制程序所产生的进给脉冲串,系统的输出是发送给电动机轴的正比于输入脉冲频率的转速指令。
电动机轴的角位移则由进给脉冲的数量所决定,而电动机的旋转方向则决定于方向信号电平。
无论采用何种产生运动指令的软件,DDA算法或逐点比较法,由计算机产生的进给脉冲串通过脉冲分配器和驱动电路驱动步进电动机以推动机床的溜板和工作台。
开环控制进给系统没有位移传感器,故没有反馈控制功能。
图7.1步进电动机的开环进给运动控制系统
7.1.2闭环和半闭环伺服控制系统
图7.2所示为直流和交流伺服电动机闭环和半闭环控制系统。
由插补计算机发出的数字增量输出信号经控制计算机内的位置控制器和转速控制器处理以执行闭环控制。
由插补计算机产生的运动控制指令有两个参数,即VYt和kVYt(原文误为kVXt),它们是被插补直线段的路径方程X=kY的两个参数方程Y=Vyt和X=VXt的参数。
比较这些运动指令和位移
图7.2半闭环和闭环控制系统
传感器的反馈值得到位置误差,它被送入位置控制器以产生转速控制指令,该指令再与转速传感器的反馈值比较以产生转速误差,它被送入转速控制器以产生电流控制指令,该指令由D/A转换器转换为模拟量,经电流放大器和功率放大器放大后去驱动直流或交流伺服电动机。
这就是闭环控制系统的控制过程。
7.2数字PID控制器的算法
在闭环控制系统中的一个重要环节就是在微机中执行的位置控制器和速度控制器的算法程序。
比例-积分-微分(PID)控制器被广泛用于伺服控制系统,包括单一比例控制器(P),比例、积分联合控制器(PI),比例、微分联合控制器(PD)和全体PID控制器。
在功能上,P能增大开环增益,减小稳态误差和扩大系统的通过频率,但也会使系统变得不稳定。
I能增大一阶纯积分从而提高系统一个无静差度,但也会减少相位裕度从而使系统的稳定性变差。
D可以提高系统的阻尼从而增强系统的稳定性,但也会增大系统的高频增益从而放大高频噪声而影响系统的正常工作。
在应用上进给运动的伺服控制系统通常采用两种控制器:
一是采用PI控制器作为位置控制器,而D功能则由测速发电机来实现;
另一种是在单个位置控制器的伺服控制系统中采用P控制器。
模拟量PID控制器的算法用专门的电路实现,即
(7-1)
式中e(t)——位置误差信号
m(t)——由PID控制器来的控制信号输出
在微机内数字控制器的递推算法为
或
(7.2)
其中标
式中T是采样间隔,kp,ki和kd分别是比例系数、积分时间常数和微分时间常数。
7.3伺服进给系统的建模
为了设计和评定一个伺服进给系统,需要在建立系统数学模型的基础上作系统特性分析。
图7.3是一半闭环单传感器伺服进给系统的组成,图7.4表示该系统动力学参数的结构,其中位置控制器用比例控制器实现,它相当于一个系数为Kp的比例环节。
位置控制器的输出数值经D/A转换器转换为模拟量并送入转速调节单元。
D/A转换器也是一个系数为KA的比
图7.3半闭环单传感器伺服进给系统
图7.4半闭环单传感器伺服进给系统的动态结构
例环节。
转速调节单元,即转速控制器等效于一个以KV/(TVS+1)表示的惯性环节,其中TV是惯性时间常数,KV是转速控制单元的放大倍数。
转速调节单元的输出是转速量,它通过积分环节1/S成为角位移。
位置测量环节包括位置传感器和调节电路,它也等价于一系数为Kj的比例环节。
由此,在图7.4中的前向通道的传递函数为
 升级会员
升级会员 