完整word版中国矿业大学常俊林版《自动控制原理》16章课后习题解答.docx
《完整word版中国矿业大学常俊林版《自动控制原理》16章课后习题解答.docx》由会员分享,可在线阅读,更多相关《完整word版中国矿业大学常俊林版《自动控制原理》16章课后习题解答.docx(27页珍藏版)》请在冰豆网上搜索。
完整word版中国矿业大学常俊林版《自动控制原理》16章课后习题解答
第一章
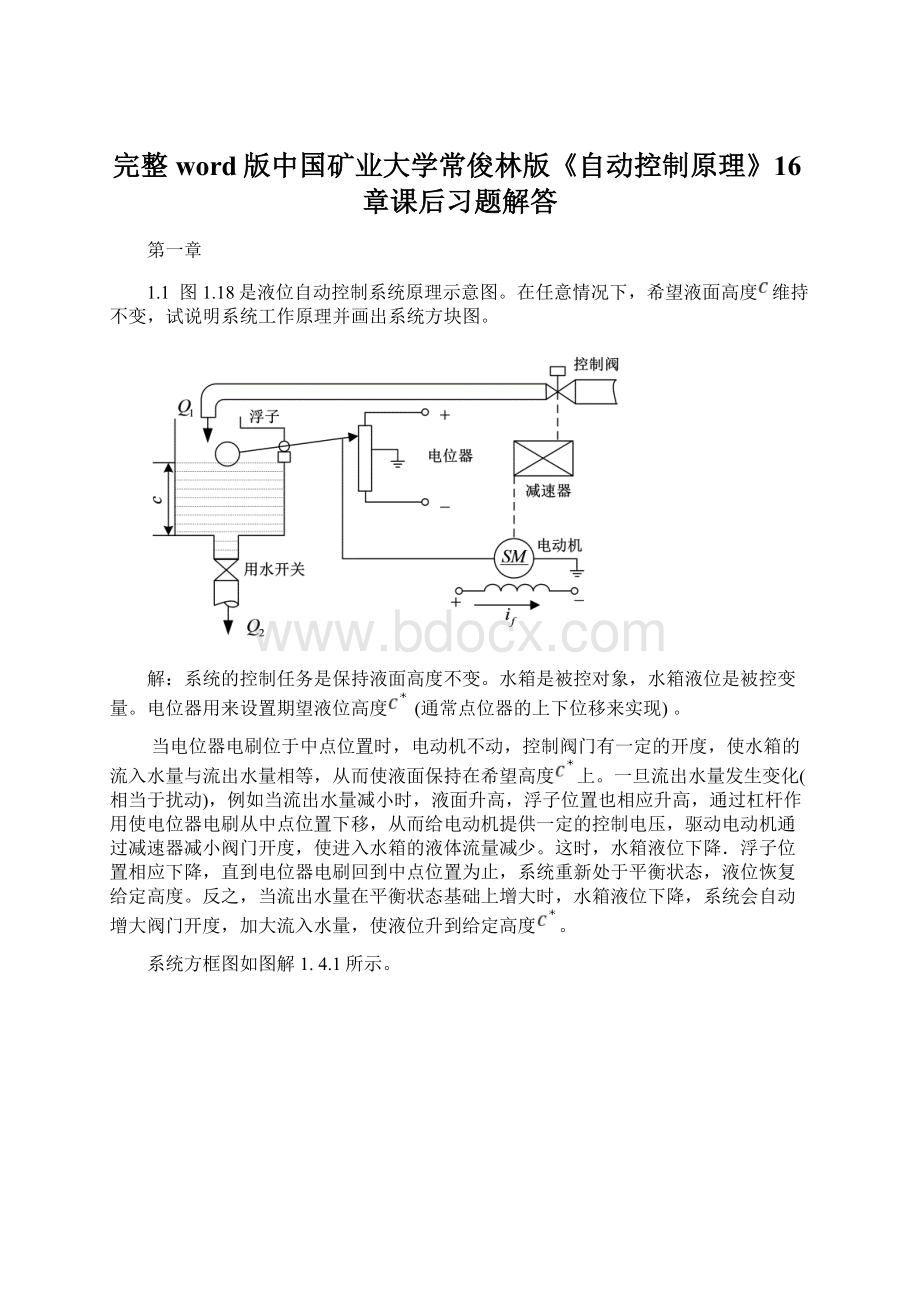
1.1图1.18是液位自动控制系统原理示意图。
在任意情况下,希望液面高度维持不变,试说明系统工作原理并画出系统方块图。
解:
系统的控制任务是保持液面高度不变。
水箱是被控对象,水箱液位是被控变量。
电位器用来设置期望液位高度(通常点位器的上下位移来实现)。
当电位器电刷位于中点位置时,电动机不动,控制阀门有一定的开度,使水箱的流入水量与流出水量相等,从而使液面保持在希望高度上。
一旦流出水量发生变化(相当于扰动),例如当流出水量减小时,液面升高,浮子位置也相应升高,通过杠杆作用使电位器电刷从中点位置下移,从而给电动机提供一定的控制电压,驱动电动机通过减速器减小阀门开度,使进入水箱的液体流量减少。
这时,水箱液位下降.浮子位置相应下降,直到电位器电刷回到中点位置为止,系统重新处于平衡状态,液位恢复给定高度。
反之,当流出水量在平衡状态基础上增大时,水箱液位下降,系统会自动增大阀门开度,加大流入水量,使液位升到给定高度。
系统方框图如图解1.4.1所示。
1.2恒温箱的温度自动控制系统如图1.19所示。
(1)画出系统的方框图;
(2)简述保持恒温箱温度恒定的工作原理;
(3)指出该控制系统的被控对象和被控变量分别是什么。
图1.19恒温箱的温度自动控制系统
解:
恒温箱采用电加热的方式运行,电阻丝产生的热量与调压器电压平方成正比,电压增高,炉温就上升。
调压器电压由其滑动触点位置所控制,滑臂则由伺服电动机驱动.炉子的实际温度用热电偶测量,输出电压作为反馈电压与给定电压进行比较,得出的偏差电压经放大器放大后,驱动电动机经减速器调节调压器的电压。
在正常情况下,炉温等于期望温度T,热电偶的输出电压等于给定电压。
此时偏差为零,电动机不动,调压器的滑动触点停留在某个合适的位置上。
这时,炉子散失的热量正好等于从电阻丝获取的热量,形成稳定的热平衡状态,温度保持恒定。
当炉温由于某种原因突然下降(例如炉门打开造成热量流失)时,热电偶输出电压下降,与给定电压比较后出现正偏差,经放大器放大后,驱动电动机使调压器电压升高,炉温回升,直至温度值等于期望值为止。
当炉温受扰动后高于希望温度时,调节的过程正好相反。
最终达到稳定时,系统温度可以保持在要求的温度值上。
系统中,加热炉是被控对象,炉温是被控变量,给定量是给定电位器设定的电压(表征炉温的希望值)。
给定电位计是给定元件,放大器完成放大元件的功能,电动机、减速器和调压器组成执行机构,热电偶是测量元件。
系统方框如图解1.4.5所示。
1.3
解:
当负载(与接收自整角机TR的转子固联)的角位置与发送机Tx转子的输入角位置6一致时,系统处于相对豫止状态,自整角机输出电压(即偏差电压)为0,放大器输出为0,电动机不动,系统保持在平衡状态。
当改变时,与失谐,自整角接收机输出与失谐角成比例的偏差电压,该偏差电压经整流放大器、功率放大器放大后驱动电动机转动,带动减速器改变负载的角位置,使之跟随变化,直到与一致,系统达到新的平衡状态时为止。
系统中采用测速发电机TG作为校正元件,构成内环反馈,用于改善系统动态特性。
该系统为随动系统。
被控对象是负载;被控量为负载角位置,给定量是发送自整角机TX转子的角位置。
自整角机完成测量、比较元件的功能,整流放大器、功率放大器共同完成放大元件的功能,电动机SM和减速器组成执行机构,测速发电机TG是校正元件,系统方框图如图解1.4.6所示。
1.4
解工作原理:
温度传感器不断测量交换器出口处的实际水温,并在温度控制器中与给定温度相比较,若低于给定温度,其偏差值使蒸汽阀门开大,进入热交换器的蒸汽量加大,热水温度升高,直至偏差为零。
如果由于某种原因,冷水流量加大,则流量值由流量计测得,通过温度控制器,开大阀门,使蒸汽量增加,提前进行控制,实现按冷水流量进行前馈补偿,保证热交换器出口的水温波动不大。
系统中,热交换器是被控对象,实际热物料温度为被控变量,冷水流量是干扰量。
系统方框图如图解1.4.4所示。
这是一个按干扰补偿的复合控制系统。
1.5
解带上负载后,由于负载的影响,图(a)与图(b)中的发电机端电压开始时都要下降,但图(a)中所示系统的电压能恢复到110v,而图(b)中的系统却不能。
理由如下;
对图(a)所示系统,当输出电压u低于给定电压时,其偏差电压经放大器K,使电机SM转动,经减速器带动电刷减小发电机G的激磁回路电阻,使发电的激磁电流增大,提高发电机的端电压,从而使偏差电压减小,直至偏差电压为零时,电机才停止转动。
因此,图(a)系统能保持110V电压不变。
对图(b)所示系统,当输出电压低于给定电压时,其偏差电压经放大器K,直接使发电机激磁电流增大,提高发电机的端电压,使发电机G的端电压回升,偏差电压减小,但是偏差电压始终不可能等于零,因为当偏差电压为零时,,发电机就不能工作。
偏差电压的存在是图(b)系统正常工作的前提条件。
即图(b)中系统的输出电压会低于110V。
第二章
2.1(a)(不考虑物块的重力)
(b)
(c)
2.2
(a)
(b)A点:
(1)
B点:
(2)
由
(1)和
(2)得
(3)
由(3)解出,并代入
(2)得:
经比较可以看出,电网络(a)和机械系统(b)两者参数的相似关系为
2.3
2.4
2.5
2.6
2.7
2.8
(1)
(2)假设电动机时间常数为,忽略电枢电感的影响,可得直流电动机的传递函数为
,为电动机的传递系统,单位为。
又设测速发电机的传递系数为()
系统的传递函数为:
2.9
2.10
第三章
3.1,。
,
。
3.2
。
3.3,。
3.4
由超调量等于15%知,。
再由峰值时间等于0.8秒可得,。
闭环传函,,。
3.5
(1)稳定;
(2)不稳定;(3)不稳定。
3.6
(1)不稳定,右半平面两个根;
(2)临界稳定(不稳定),一对纯虚根
(3)不稳定,右半平面一个根,一对纯虚根
(4)不稳定,右半平面一个根,一对纯虚根
3.7
3.8
3.9
(1)
(2)将代入闭环特征方程后,整理得
,解得
3.10
加入局部反馈前:
开环传递函数,。
加入局部反馈后:
开环传递函数,。
3.11
首先判定系统稳定性,该系统稳定。
开环增益,误差分别为0,1.33,∞,∞
3.12
(1),。
,
(2),。
,
3.14
3.15
(1)
(2)要使系统稳定,需有。
(4)系统不稳定。
第四章
4.1
4.2简要证明:
令为根轨迹上的任意一点,由幅角条件可知:
又根据三角函数关系:
,有
于是有,
,问题得证。
4.3略
4.4
(2)开环增益
(3)根轨迹的分离点为,分离点处对应的开环增益
(根据时,闭环极点之和等于开环极点之和。
可以求出时另一个极点为-108,与虚轴的距离比分离点-21大五倍以上。
二重极点-21为主导极点,可以认为临界阻尼比相对应的开环增益为9.6)
4.5
(1)等效开环传递函数为
分离点为-8.5
(2)等效开环传递函数为
分离点-20
4.6、4.7为正反馈根轨迹,略。
4.8
(2)时,根轨迹与虚轴相交于;时,闭环系统稳定。
(3)时,分离点(一对相等的实数根)为-0.85,第三个闭环极点为-4.3(非主导极点,忽略不计)。
时,非主导的负实数极点都可忽略不计,因为当时,闭环系统为欠阻尼状态。
(4)时等幅震荡,震荡频率为
(5)由作图近似可得,时,。
4.9
简单说明:
Kr<3系统不稳定。
(与虚轴交点)
3第五章
5.1,T=1
5.2
5.3
(1)
(2)
(3)
5.4
(1)
(2)
(3)
5.5
5.6
题号
开环
极点
穿越负实轴次数
奈氏判据
闭环极点
闭环
系统
(1)
P=0
Z=P-2N=2
不稳定
(2)
P=0
Z=P-2N=0
稳定
(3)
P=0
Z=P-2N=2
不稳定
(4)
P=0
Z=P-2N=0
稳定
(5)
P=1
Z=P-2N=0
稳定
(6)
P=0
Z=P-2N=0
稳定
(7)
P=0
Z=P-2N=0
稳定
(8)
P=1
Z=P-2N=2
不稳定
5.7
(1)
(2)
(3)
5.8
(1)
(2)
(3)
5.9
5.10
由可知:
快速性提高。
5.11
(1)
I型系统,r(t)=1
(2)
I型系统,r(t)=t
(3)
(4)
(5)
(6)
(7)
5.12
K增大和T减少
,不变(稳定裕度不变)
5.13
第六章
6.1取=6,,
6.2取,
6.3
(3)比较两种校正方案的优缺点
稳态性能一样,动态性能比较如下:
动态性能超前网络校正系统好于滞后网络校正系统
抗高频干扰滞后网络校正系统优于超前网络校正系统
6.4
6.5
(1)C图网络种最好
(2)12Hz正弦噪声削减10倍,C种网络满足。
需要串联滞后-超前校正才能实现(由图可得:
校正后系统在75.4rad/s处,是-20dB,20lg0.1=-20,缩小10倍)。
6.6
6.7
,T应当选得足够小,不影响系统的动态性能。
6.8从物理实现性考虑,取
6.9
 升级会员
升级会员 