实验四Word下载.docx
《实验四Word下载.docx》由会员分享,可在线阅读,更多相关《实验四Word下载.docx(9页珍藏版)》请在冰豆网上搜索。
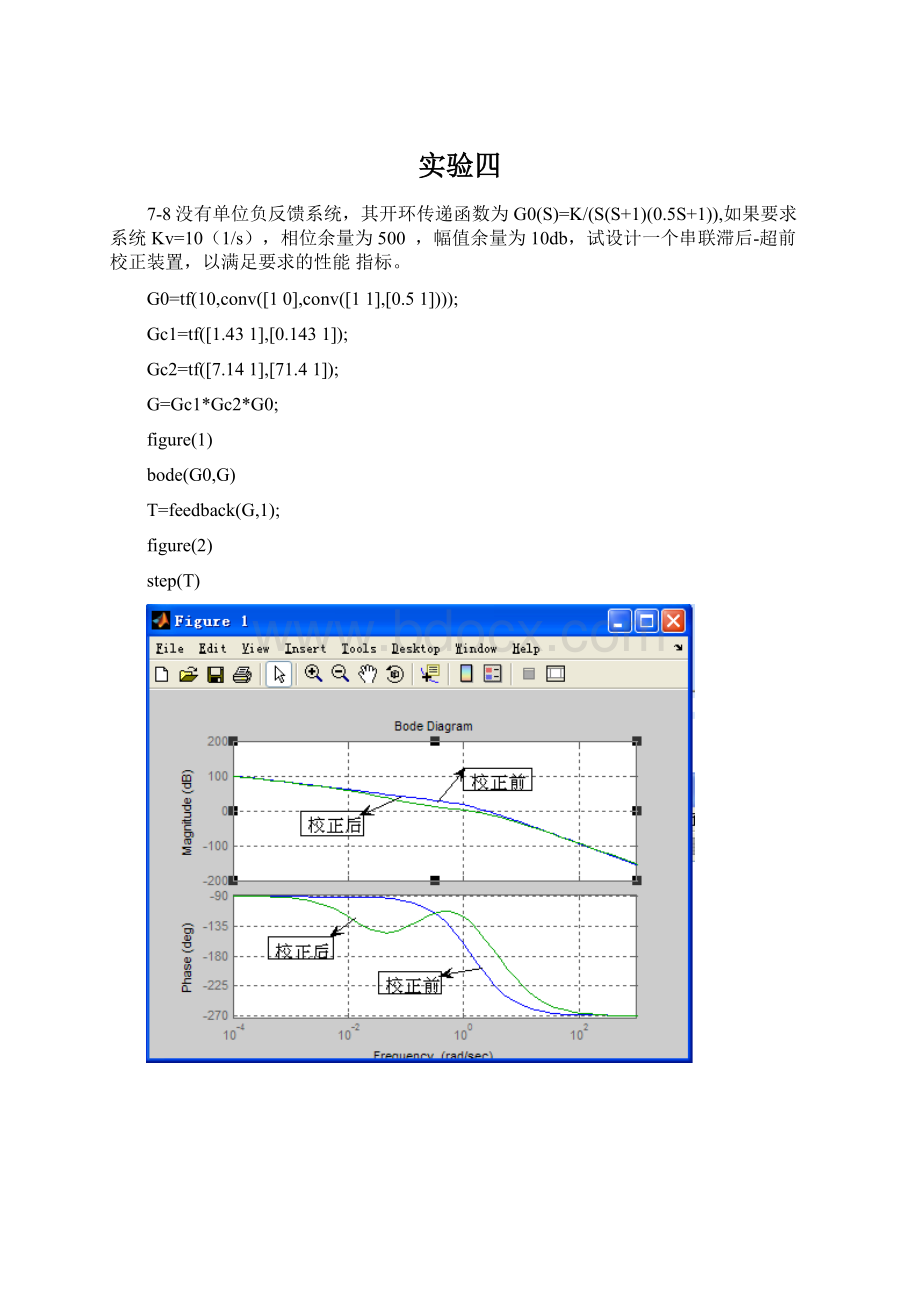
step(T)
7-3
2、已知原系统的开环传递函数为100/(s(0.04s+1)),试求;
(1)绘制原系统的BODE图,标出相位裕度及增益裕度;
(2)现引入超前校正装置G0(S)=0.0262s+1/0.0106s+1,绘制校正后系统的BODE图,并与原系统的BODE图进行比较。
(3)绘制校正前后的阶跃响应曲线并进行比较。
G0=tf(100,[0.04,1,0]);
[Gm0,Pm0,Wcg0,Wcp0]=margin(G0);
Gc=tf([0.0262,1],[0.0106,1]);
G=Gc*G0;
[Gm,Pm,Wcg,Wcp]=margin(G);
bode(G0,G);
gridon
T0=feedback(G0,1);
figure
step(T0,T);
Gm0=
Inf
Pm0=
28.0243
Wcg0=
Wcp0=
46.9701
Gm=
Pm=
47.5917
Wcg=
Wcp=
60.3251
7-8
7-12
已知被控对象传递函数为G(s)=1/(S+1)(2S+1)(5S+1)(10S+1)
试用Z-N两种整定方法确定PID控制器的参数,并绘制阶跃响应曲线。
输入MATLAB语句:
G=tf(1,conv([11],conv([21],conv([51],[101]))));
step(G)
得开环阶跃响应曲线如图7-24所示。
根据开环阶跃响应曲线,可以近似的取K=1,T=4.05,T=26.9-4.05=22.85作为带有延迟的一阶环节模型。
G1=tf(1,conv([11],conv([21],conv([51],[101]))));
kc=7.689;
G=feedback(G1*kc,1);
step(G,40)
得系统阶跃响应等振曲线如图7-25所示,可以取KC=7.689;
TC=19.7
PID控制器参数设计程序如下:
t1=0:
0.5:
150
k=1;
t=22.85;
tor=4.05;
[Gc,kc,ti,td]=z_n1(k,t,tor,'
pid'
);
Gc11=feedback(G*Gc,1);
step(Gc11,150)
holdon;
Kc=7.689;
Tc=19.7;
[Gc,kc,ti,td]=z_n2(Kc,Tc,'
Gc12=feedback(G*Gc,1);
step(Gc12,150)
响应曲线法
临界比例度法
程序中,z_n1,z_n2为自定义函数,程序清单如下:
function[Gc,kc,ti,td]=z_n1(k,t,tor,varargin)
controllertype=varargin{1};
switchcontrollertype
case'
p'
delta=k*tor/t;
Gc=tf(1/delta,1);
kc=1/delta;
ti=inf;
td=0;
case'
pi'
delta=1.1*k*tor/t;
ti=3.3*tor;
Gc=tf([ti1],[ti0])*kc;
delta=0.85*k*tor/t;
ti=2*tor;
td=0.5*tor;
Gc1=tf([ti1],[ti0])*kc;
Gc2=tf([td0],1)*kc;
Gc=Gc1+Gc2;
end
function[Gc,kc,ti,td]=z_n2(Kc,Tc,varargin)
kc=Kc/2;
Gc=tf(kc,1);
kc=Kc/2.2;
ti=0.833*Tc;
kc=Kc/1.7;
ti=0.5*Tc;
td=0.125*Tc;
 升级会员
升级会员 