参数化建模Word文件下载.docx
《参数化建模Word文件下载.docx》由会员分享,可在线阅读,更多相关《参数化建模Word文件下载.docx(20页珍藏版)》请在冰豆网上搜索。
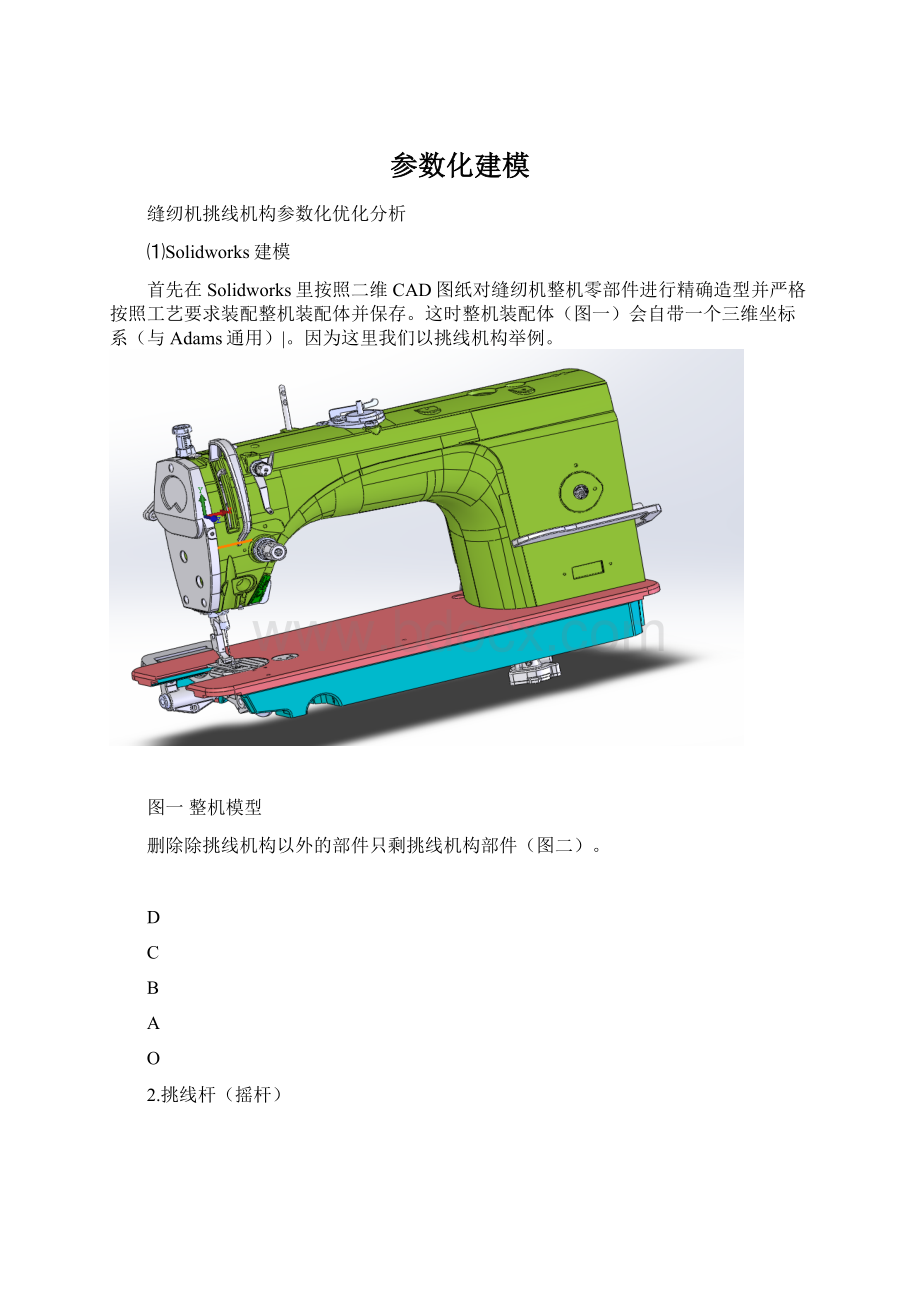
图二挑线机构
1.针杆曲柄-上轴(曲柄),2.挑线杆(摇杆),3.挑线连杆(摇杆)
挑线机构实际上是一个曲柄摇杆机构,所以综合到一个平面内来进行分析运算。
在Adams里进行参数化建模需要用到挑线机构运动副轴线上任意一点的坐标数据。
上轴的旋转轴心为原点O,挑线杆和针杆曲柄的旋转轴心线上点A,挑线杆和挑线连杆旋转轴心线上点B,挑线连杆和挑线连杆销旋转轴心线上点C,过线孔中心点D。
所以O为曲柄和机架的铰接点,A为曲柄和连架杆的铰接点,B点为连架杆和摇杆的铰接点,C为摇杆和机架的铰接点。
OA为曲柄,AB为连架杆,BC为摇杆,ABD为挑线杆。
为方便介绍,下文就采用四杆机构来代替挑线机构进行介绍。
⑵测量坐标数据
测量上步中Solidworks中的挑线机构各铰接点轴线上的点用作Adams参数化建模,所测量的数据存放在Excel中记录。
测得如下(图三)数据。
点
X轴
Y轴
Z轴
备注
摇杆-机架
77.11770826
-10.51313793
摇杆-连架杆
83.13526455
18.16226994
曲柄-连架杆
63.77629813
2.34359683
曲柄-机架
50.37770826
7.88686207
过线孔
78.86567128
53.41522121
图三测得坐标数据
⑶Adams参数化建模
在Adams中建立挑线机构(曲柄摇杆机构)参数化模型,按照部件实际的相互运动关系对零部件进行约束,并创建约束给曲柄一个匀速转动1r/min,模拟缝纫机工作时的电机驱动。
建立的曲柄摇杆机构如图四所示。
电机驱动
曲柄
连架杆
摇杆
图四Adams参数化模型
⑷明确目标,设置设计变量并定义变化范围
明确优化分析后需达到的目标,把可以改变的参数并将它们设置为设计变量并定义设计变量的变化范围。
可以以实验测得,或者是理论分析出的过线孔轨迹为目标曲线,可以以摇杆的摆角变化为目标等。
比如这里的曲柄摇杆机构按图示点的参数位置一定,杆长配比一定,运动形式一定,机构的运动形式是确定的。
假定现在以摇杆摆角变为360度,即曲柄摇杆机构变为双曲柄机构为目标。
现在这个机构不能满足实际的需求,实际中又有部分点是在机壳上的,位置参数不能改(摇杆-机架,过线孔,曲柄-机架),所以设置曲柄-摇杆点和摇杆-连架杆点的Y,Z为设计变量,如图五所示,分别为DV_1,DV_2,DV_3,DV_4。
图五设计变量设置
定义设计变量的变化范围,在值上下变动10,优化分析时允许超出设定的变化范围,如图六所示。
图六设计变量变化范围设置
⑸确定优化分析目标
目标确定,如果目标是实验测得的曲线,或者是可以理论测得的曲线,把曲线数据另存为txt格式导入Adams中,一般第一列为时间变化,后面每一列对应时间变量即为一条样条曲线spline,依次可以输入多条样条曲线。
这里目标曲线是摇杆CB角度和OA角度变化一致,一个周期内从0到360匀速变化。
这里导入目标数据,如图七所示为导入的样条曲线splineANGLE。
图七-1图七-2
图七-3
⑹创建状态变量。
就是把摇杆CA从初始状态开始的角度变化(如图八所示为摇杆CB角度的初始变化)创建成可以实时监测的系统变量函数ANGLEcb(如图九所示)。
图八
图九
按照同样的方法建立导入数据创建的样条曲线ANGLE的状态变量函数ANGLEmubiao,如图十所示。
⑺创建测量函数,创建设计目标变量。
目标是摇杆CB转角与输入的ANGLE样条曲线变化一致,所以创建求解两个的系统变量的方差为测量函数result(如图十),以求解测量函数的平均值为目标创建设计变量目标result_min(如图十一)。
图十
图十一
⑻开始优化分析。
选择步骤⑷中建立的DV_1,DV_2,DV_3,DV_4作为设计变量,以设计目标变量函数result_min的最小值作为优化目标,如图十二所示。
图十二
点击start开始优化分析。
Adams开始自动运算,如图十三所示。
图十三
⑼
缝纫机抬牙脚机构保持力力平衡机构配比计算
这时整机装配体(图十四)会自带一个三维坐标系(与Adams通用)|。
图十四整机模型
删除除挑线机构以外的部件只剩抬牙脚保持机构的部件(图十五)。
F
抬牙脚连杆
膝控连杆
膝控提升杠杆
图十五
抬牙脚保持力模型主要有膝控提升杠杆,膝控连杆,抬牙脚连杆组成,F是抬牙脚保持时弹簧给抬牙脚连杆的力,
是电磁铁为了保持抬牙脚高度时期望提供的理想值,膝控提升杠杆和抬牙脚连杆通过膝控连杆铰接传递运动。
测量上步中Solidworks中的抬牙脚保持机构各铰接点轴线上的点用作Adams参数化建模,所测量的数据存放在Excel中记录。
测得如下(图十六)数据。
重要点坐标
X
Y
Z
抬压脚连杆-机壳
243.6320922
49.68198017
38.11137752
267.7970686
64.46404402
18.4
35.11137752
15.4
36.61137752
16.9
抬压脚连杆受力点
282.2019861
48.67547553
306.3669625
63.45753938
膝控连杆-抬压脚连杆
243.1068972
9.68542819
267.2718736
24.46749204
膝控提升杠杆-膝控连杆
27.78473158
14.65147735
21.31137752
51.94970802
29.4335412
1.6
机壳-膝控提升杠杆
24.83209237
-15.31801983
48.99706881
-0.53595598
支撑受力点
-24.16497644
-14.78206385
18.11137752
-1.6
19.71137752
图十六测得坐标数据
⑶在Adams中建立抬牙脚保持参数化模型。
为了方便最后优化分析,以支撑受力点为原点,按照部件实际的相互运动关系对零部件进行约束。
并创建两个力模拟弹簧的作用力和电磁铁的保持力,分别作用在抬牙脚连杆受力点上和支撑受力点上。
由于力的作用如果机构不能实现保持的话,进行动力学仿真时是不能保持平衡的。
建立的抬牙脚保持机构如图十七所示。
图十七
⑷明确优化目标,设置设计变量并定义范围
这里要实现的是抬牙脚在弹簧支撑力和电磁铁保持力作用下机构的平衡不动,我们可以把目标定为支撑受力点即原点保持不动。
实现这个目标不需要从外导入实验数据建立样条曲线,由Adams自带函数定义即可实现。
由于机壳的限制不改的原因,只把膝控提升连杆的X,Y向坐标设置为设计变量DV_1,DV_2(如图十八)。
定义设计变量的变化范围(如图十九所示)。
图十八
图十九
在弹簧力和电磁铁保持力作用下机构保持平衡不动,可以等效作为在里的作用下,机构支撑受力点与原点的距离为0。
⑹创建状态变量
定义支撑力受力点与原点O的距离函数dis_force,实时监测支撑受力点关于原点距离情况,即是否离开原点进行运动。
图二十为未优化前距离函数dis_force的变化图。
图二十
⑺创建测量函数,创建设计变量目标
创建测量支撑受力点与原点距离函数dis_force的测量函数fun_force(如图二十一)。
创建以测量函数fun_force最大值(即支撑受力点与原点在仿真分析过程中的距离最大值)为目标的设计变量目标result(如图二十二)。
图二十一
图二十二
选择步骤⑷中建立的DV_1,DV_2作为设计变量,以设计目标变量函数result的最小值作为优化目标,如图二十三所示。
图二十三
点击start开始优化分析,系统自动开始模拟优化(图二十四)。
图二十四
⑼查看优化结果并验证
优化分析结束后直接把参数化点的坐标改变为优化后的坐标值,DV_1,DV_2分别优化为59.6309200455,16.7524400294。
仿真运行新模型,查看抬牙脚保持机构的平衡优化情况(图二十五)。
可通过观看优化前后抬牙脚保持机构的仿真视频更加直观的显示效果。
图二十五-1
图二十五-2
有分析结果可知支撑受力点Y方向还是有范围内的周期内抖动,不过抖动最大值为0.1916mm,可以考虑作为误差范围。
成功模拟优化任务。
⑽试制样品,整机跑合
试制出抬牙脚保持机构优化后的模型,代替原来机构进行跑合试验保持效果。
由机构参数化建模到缝纫机整机参数化建模。
参数化建模优化在实际应用中还可以实现很多其他的机构优化和力优化。
 升级会员
升级会员 