高中物理二级结论集.doc
《高中物理二级结论集.doc》由会员分享,可在线阅读,更多相关《高中物理二级结论集.doc(7页珍藏版)》请在冰豆网上搜索。
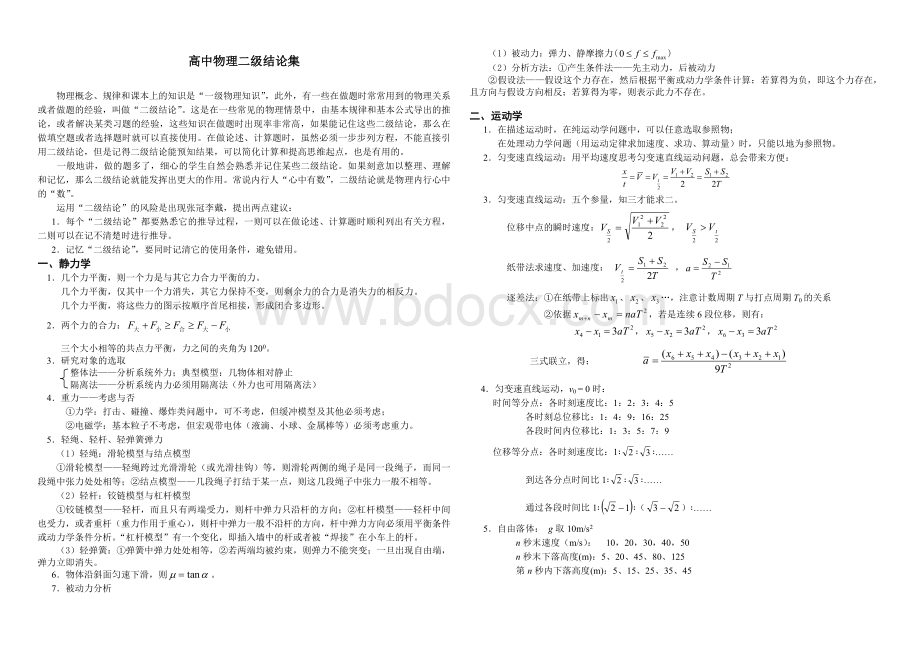
高中物理二级结论集
物理概念、规律和课本上的知识是“一级物理知识”,此外,有一些在做题时常常用到的物理关系或者做题的经验,叫做“二级结论”。
这是在一些常见的物理情景中,由基本规律和基本公式导出的推论,或者解决某类习题的经验,这些知识在做题时出现率非常高,如果能记住这些二级结论,那么在做填空题或者选择题时就可以直接使用。
在做论述、计算题时,虽然必须一步步列方程,不能直接引用二级结论,但是记得二级结论能预知结果,可以简化计算和提高思维起点,也是有用的。
一般地讲,做的题多了,细心的学生自然会熟悉并记住某些二级结论。
如果刻意加以整理、理解和记忆,那么二级结论就能发挥出更大的作用。
常说内行人“心中有数”,二级结论就是物理内行心中的“数”。
运用“二级结论”的风险是出现张冠李戴,提出两点建议:
1.每个“二级结论”都要熟悉它的推导过程,一则可以在做论述、计算题时顺利列出有关方程,二则可以在记不清楚时进行推导。
2.记忆“二级结论”,要同时记清它的使用条件,避免错用。
一、静力学
1.几个力平衡,则一个力是与其它力合力平衡的力。
几个力平衡,仅其中一个力消失,其它力保持不变,则剩余力的合力是消失力的相反力。
几个力平衡,将这些力的图示按顺序首尾相接,形成闭合多边形。
2.两个力的合力:
三个大小相等的共点力平衡,力之间的夹角为1200。
3.研究对象的选取
整体法——分析系统外力;典型模型:
几物体相对静止
隔离法——分析系统内力必须用隔离法(外力也可用隔离法)
4.重力——考虑与否
①力学:
打击、碰撞、爆炸类问题中,可不考虑,但缓冲模型及其他必须考虑;
②电磁学:
基本粒子不考虑,但宏观带电体(液滴、小球、金属棒等)必须考虑重力。
5.轻绳、轻杆、轻弹簧弹力
(1)轻绳:
滑轮模型与结点模型
①滑轮模型——轻绳跨过光滑滑轮(或光滑挂钩)等,则滑轮两侧的绳子是同一段绳子,而同一段绳中张力处处相等;②结点模型——几段绳子打结于某一点,则这几段绳子中张力一般不相等。
(2)轻杆:
铰链模型与杠杆模型
①铰链模型——轻杆,而且只有两端受力,则杆中弹力只沿杆的方向;②杠杆模型——轻杆中间也受力,或者重杆(重力作用于重心),则杆中弹力一般不沿杆的方向,杆中弹力方向必须用平衡条件或动力学条件分析。
“杠杆模型”有一个变化,即插入墙中的杆或者被“焊接”在小车上的杆。
(3)轻弹簧:
①弹簧中弹力处处相等,②若两端均被约束,则弹力不能突变;一旦出现自由端,弹力立即消失。
6.物体沿斜面匀速下滑,则。
7.被动力分析
(1)被动力:
弹力、静摩擦力()
(2)分析方法:
①产生条件法——先主动力,后被动力
②假设法——假设这个力存在,然后根据平衡或动力学条件计算:
若算得为负,即这个力存在,且方向与假设方向相反;若算得为零,则表示此力不存在。
二、运动学
1.在描述运动时,在纯运动学问题中,可以任意选取参照物;
在处理动力学问题(用运动定律求加速度、求功、算动量)时,只能以地为参照物。
2.匀变速直线运动:
用平均速度思考匀变速直线运动问题,总会带来方便:
3.匀变速直线运动:
五个参量,知三才能求二。
位移中点的瞬时速度:
,
纸带法求速度、加速度:
,
逐差法:
①在纸带上标出、、…,注意计数周期T与打点周期T0的关系
②依据,若是连续6段位移,则有:
,,
三式联立,得:
4.匀变速直线运动,v0=0时:
时间等分点:
各时刻速度比:
1:
2:
3:
4:
5
各时刻总位移比:
1:
4:
9:
16:
25
各段时间内位移比:
1:
3:
5:
7:
9
位移等分点:
各时刻速度比:
1∶∶∶……
到达各分点时间比1∶∶∶……
通过各段时间比1∶∶()∶……
5.自由落体:
g取10m/s2
n秒末速度(m/s):
10,20,30,40,50
n秒末下落高度(m):
5、20、45、80、125
第n秒内下落高度(m):
5、15、25、35、45
6.上抛运动:
对称性:
,,
7.“刹车陷阱”,应先求滑行至速度为零即停止的时间t0,确定了滑行时间t大于t0时,用或S=vot/2,求滑行距离;若t小于t0时
8.追赶、相遇问题
匀减速追匀速:
恰能追上或恰好追不上v匀=v匀减
v0=0的匀加速追匀速:
v匀=v匀加时,两物体的间距最大smax
同时同地出发两物体相遇:
位移相等,时间相等。
A与B相距△s,A追上B:
sA=sB+△s,相向运动相遇时:
sA=sB+△s。
9.物体刚好滑到小车(木板)一端的临界条件是:
物体滑到小车(木板)一端时与小车速度相等。
10.绳(杆)连接:
沿绳方向分速度相等——将两个物体的实际速度沿绳、垂直绳方向分解。
11.小船过河:
⑴当船速大于水速时①船头的方向垂直于水流的方向时,所用时间最短,
②合速度垂直于河岸时,航程s最短s=dd为河宽
⑵当船速小于水速时①船头的方向垂直于水流的方向时,所用时间最短,
d
v船
v合
v水
②合速度不可能垂直于河岸,最短航程
三、牛顿运动定律
1.系统的牛顿第二定律
(整体法——求系统外力)
2.沿粗糙水平面滑行的物体:
a=μg
沿光滑斜面下滑的物体:
a=gsinα
沿粗糙斜面下滑的物体 a=g(sinα-μcosα)
垂直于斜面
竖直
3.沿如图光滑斜面下滑的物体:
沿角平分线滑下最快
当α=45°时所用时间最短
小球下落时间相等
小球下落时间相等
α增大,时间变短
α
F
α
F
4.一起加速运动的物体系,若力是作用于上,则和的相互作用力为
α
F
1
m
与有无摩擦无关,平面,斜面,竖直方向都一样
α
F
m
1
α
a
6.下面几种物理模型,在临界情况下,a=gtanα
a
a
a
a
a
a
光滑,相对静止弹力为零相对静止光滑,弹力为零
F
a
a
F
7.如图示物理模型,刚好脱离时。
弹力为零,此时速度相等,加速度相等,之前整体分析,之后隔离分析
g
最高点分离在力F作用下匀加速运动在力F作用下匀加速运动
B
F
8.下列各模型中,速度最大时合力为零,速度为零时,加速度最大
B
F
9.超重:
a方向竖直向上;(匀加速上升,匀减速下降)
失重:
a方向竖直向下;(匀减速上升,匀加速下降)
四、圆周运动万有引力
1.向心力公式:
2.在非匀速圆周运动中使用向心力公式的办法:
沿半径方向的合力是向心力。
3.竖直平面内的圆运动
(1)“绳”类:
最高点最小速度,最低点最小速度,
要通过顶点,最小下滑高度2.5R.
最高点与最低点的拉力差6mg.
(2)绳端系小球,从水平位置无初速下摆到最低点:
弹力3mg,向心加速度2g
(3)“杆”:
最高点最小速度0,最低点最小速度.
(v临=)
v>v临,杆对小球为拉力
v=v临,杆对小球的作用力为零
v4.地面重力加速,g与高度的关系:
5.解决万有引力问题的基本模式:
“引力=向心力”,只选向心力公式。
6.人造卫星:
速度,周期,加速度
高度大则速度小、周期大、加速度小。
同一轨道上各卫星速度、周期、加速度相同。
对于相同质量的卫星,高度越大动能越小、重力势能越大、机械能越大。
速率与半径的平方根成反比,周期与半径的平方根的三次方成正比。
v2
v1
v3
v4
由卫星的运动学参量永远求不出恒星的质量和所受的引力。
同步卫星轨道在赤道上空,,。
7.卫星变轨:
8.恒星质量可用绕它做圆运动的行星或者卫星求出:
恒星密度可用贴地卫星的周期求出
9.由贴地飞行的行星能求出恒星的密度
10.卫星因受阻力损失机械能:
高度下降、速度反而增加、周期减小。
11.“黄金代换”:
地面物体所受的重力等于引力,
12.在卫星里与重力有关的实验不能做。
13.双星:
引力是双方的向心力,两星角速度相同,星与旋转中心的距离、星的线速度都跟星的质量成反比。
14.第一宇宙速度(贴地飞行的速度,恒星的最小发射速度):
,
第二宇宙速度(脱离地球所需之起飞速度):
。
第三宇宙速度(飞离太阳系所需之起飞速度):
15.开普勒三定律
(1)行星绕恒星沿椭圆轨道运动,恒星位于椭圆的一个焦点上。
(2)连接行星与恒星的矢径在相同时间内扫过相同的面积。
所以,近地点速度大而远地点速度小。
两处的速度与到地心的距离成反比。
(3)行星轨道的半长轴的三次方与运动周期的二次方成正比。
16.引力势能:
,卫星动能,卫星机械能
同一卫星在半长轴为a=R的椭圆轨道上运动的机械能,等于半径为R圆周轨道上的机械能。
五、功和能
1.判断某力是否作功,做正功还是负功
①F与l的夹角(恒力)
②F与v的夹角(曲线运动的情况)
③能量变化(两个相联系的物体作曲线运动的情况)
2.求功的六种方法
①W=Flcosα(恒力)定义式
②W=Pt(变力,恒力)
③W=△EK(变力,恒力)
④W=△E(除重力做功的变力,恒力)功能原理
⑤图象法(变力,恒力)
⑥气体做功:
W=P△V(P——气体的压强;△V——气体的体积变化)
3.动摩擦因数处处相同,克服摩擦力做功W=µmgs
4.功能关系
各力做功
功的正负与能量增减的对应关系
功能关系表达式
合外力做功
重力做功
弹簧弹力做功
电场力做功
一对滑动摩擦力做功之和
除重力以外的其他外力做功
安培力做功
归纳为五大功能关系:
(1)合外力做功与动能变化的关系——动能定理
(2)重力、弹簧弹力、电场力(保守力)做功与相关势能变化的关系——势能定理
(3)除重力以外的其他外力做功与机械能变化的关系——功能原理
(4)一对滑动摩擦力做功之和与生热的关系——
(5)安培力做功与电能变化的关系。
6.电场力做功的计算方法:
(1)由公式W=Flcosθ计算,此公式只适用于匀强电场.可变形为W=qEd(其中d=lcosθ),式中d为电荷初、末位置在电场方向上的位移.
(2)由电场力做功与电势能改变的关系计算:
W=-ΔEp=qU.计算时有两种方法:
①三个量都取绝对值,先计算出功的数值.然后再根据电场力的方向与电荷移动位移方向间的夹角确定是电场力做正功,还是电场力做负功.
②代入符号,将公式写成WAB=qUAB,特别是在比较A、B两点电势高低时更为方便:
先计算UAB=
 升级会员
升级会员 