实验一二阶系统时域响应特性的实验研究精.docx
《实验一二阶系统时域响应特性的实验研究精.docx》由会员分享,可在线阅读,更多相关《实验一二阶系统时域响应特性的实验研究精.docx(16页珍藏版)》请在冰豆网上搜索。
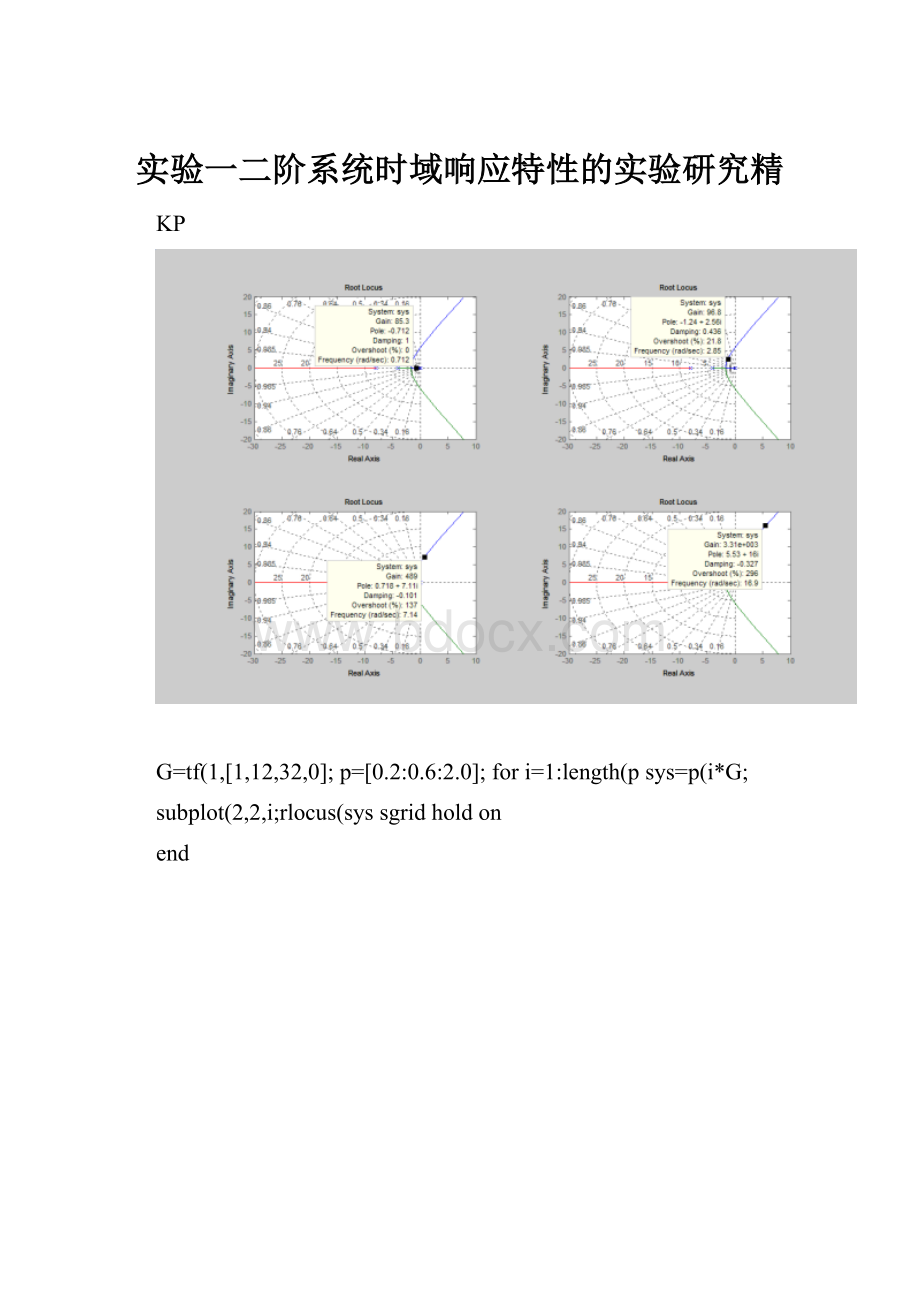
实验一二阶系统时域响应特性的实验研究精
KP
G=tf(1,[1,12,32,0];p=[0.2:
0.6:
2.0];fori=1:
length(psys=p(i*G;
subplot(2,2,i;rlocus(syssgridholdon
end
G=tf(1,[1,12,32,0];
p=[36,64,72,98];
fori=1:
length(p
sys=p(i*G;
subplot(2,2,i;bode(sys;grid
holdon
end
G=tf(1,[1,12,32,0];
p=[10,150,200,300,400];
fori=1:
length(p
sys=feedback(p(i*G,1;
subplot(2,2,i;step(sys
holdon
end
gtext('p=10',gtext('p=150',gtext('p=200',gtext('p=300',gtext('p=400'
PI(i
G=tf(1,[1,12,32,0];
p=1;
ki=[0.5:
0.5:
2.0];
fori=1:
length(ki
G0=tf(p*[1,1/ki(i],[1,0];sys=feedback(G0*G,1;subplot(2,2,i;step(sysholdon
end
G=tf(1,[1,12,32,0];
p=1;
ki=[0.5,5,10,100];
fori=1:
length(ki
G0=tf(p*[1,1/ki(i],[1,0];sys=(G0*G;
subplot(2,2,i;bode(sys;gridholdon
end
G=tf(1,[1,12,32,0];
p=1;
ki=[0.5,5,10,100];
fori=1:
length(ki
G0=tf(p*[1,1/ki(i],[1,0];sys=(G0*G;
subplot(2,2,i;rlocus(sys;gridholdon
end
PI(P
StepResponse
Time(secAmplitude
StepResponse
Time(sec
Amplitude
StepResponse
Time(sec
Amplitude
010*********
6
StepResponse
Time(sec
Amplitude
5
1015
10
2030
40
2
4
681012
G=tf(1,[1,12,32,0];pi=[36,64,72,98];k=1.5;
fori=1:
length(p
G0=tf(p(i*[1,1/k],[1,0];sys=feedback(G0*G,1;subplot(2,2,i;step(sysholdonend
-2000200agnitude(dB
G=tf(1,[1,12,32,0];p=[36,64,72,98];k=1.5;
fori=1:
length(p
G0=tf(p(i*[1,1/k],[1,0];sys=(G0*G;
subplot(2,2,i;bode(sys;gridholdonend
ImaginaryAxisRealAxis
ImaginaryAxis
RealAxis
ImaginaryAxis-40-20020
-40-200
20-40-20020
G=tf(1,[1,12,32,0];pi=[36,64,72,98];k=1.5;
fori=1:
length(p
G0=tf(p(i*[1,1/k],[1,0];sys=(G0*G;
subplot(2,2,i;rlocus(sys;gridholdonend
PD(D
G=tf(1,[1,12,32,0];
p=1;
kd=[1.0:
5.0:
16];
fori=1:
length(kd
G0=tf(p*[kd(i,1],1;sys=feedback(G0*G,1;subplot(2,2,i;step(sys;gridholdon
end
G=tf(1,[1,12,32,0];
p=1;
kd=[1,5,32,64];
fori=1:
length(kd
G0=tf(p*[kd(i,1],1;sys=G0*G;
subplot(2,2,i;bode(sys;gridholdon
end
G=tf(1,[1,12,32,0];p=1;
kd=[0.5,1,32,64];fori=1:
length(kd
G0=tf(p*[kd(i,1],1;sys=G0*G;
subplot(2,2,i;rlocus(sys;gridholdonendPD(K
Amplitude
Amplitude
Time(sec
Time(sec
Amplitude
2
46
8
02468
0.5
1
01234
2
46
8
G=tf(1,[1,12,32,0];pi=[36,64,72,98];k=1;
fori=1:
length(pG0=tf(p(i*[k,1],1;sys=feedback(G0*G,1;subplot(2,2,i;step(sys;gridholdonend
BodeDiagramFrequency(rad/sec
BodeDiagram
Frequency(rad/sec
BodeDiagram
Frequency(rad/secBodeDiagram
Frequency(rad/sec
10
-2100
102
10
-2100
102
10
-2100
10
2
10
-2100
10
2
G=tf(1,[1,12,32,0];pi=[36,64,72,98];k=1.5;
fori=1:
length(pG0=tf(p(i*[k,1],1;sys=G0*G;
subplot(2,2,i;bode(sys;gridholdonend
ImaginaryAxis0.930.780.640.240.870.46-5-10-50RealAxisSystem:
sysGain:
0.0514RootLocusPole:
-5.94+0.975iDamping:
0.98750.870.780.640.240.46Overshoot(%:
00.93ImaginaryAxis42ImaginaryAxisImaginaryAxisSystem:
sysRootLocusGain:
0Pole:
-450.870.780.640.240.46Damping:
10.93Overshoot(%:
00.97Frequency(rad/sec:
40.99210864200.9920.97System:
sysRootLocusGain:
0.04475Pole:
-5.530.870.460.930.780.640.24Damping:
1Overshoot(%:
00.97Frequency(rad/sec:
5.530.99210864200.9920.970.930.780.640.240.870.46-5System:
sys-10-505Gain:
0.138RealAxisPole:
-5.86+3.82iDamping:
0.838Overshoot(%:
0.809RootLocusFrequency(rad/sec:
750.870.460.930.780.640.240.970.992108600.9920.9750.97Frequency(rad/sec:
6.020.992108600.9920.97420.930.780.640.240.870.46-5-10-50RealAxis50.930.780.640.240.870.46-5-10-50RealAxis5G=tf(1,[1,12,32,0];p=[36,64,72,98];k=1.5;fori=1:
length(pG0=tf(p(i*[k,1],1;sys=G0*G;subplot(2,2,i;rlocus(sys;gridholdonend
 升级会员
升级会员 