机械原理大作业1Word文档格式.docx
《机械原理大作业1Word文档格式.docx》由会员分享,可在线阅读,更多相关《机械原理大作业1Word文档格式.docx(16页珍藏版)》请在冰豆网上搜索。
学号:
指导教师:
陈明
设计时间:
2013年06月20日
哈尔滨工业大学机械设计
一、题目
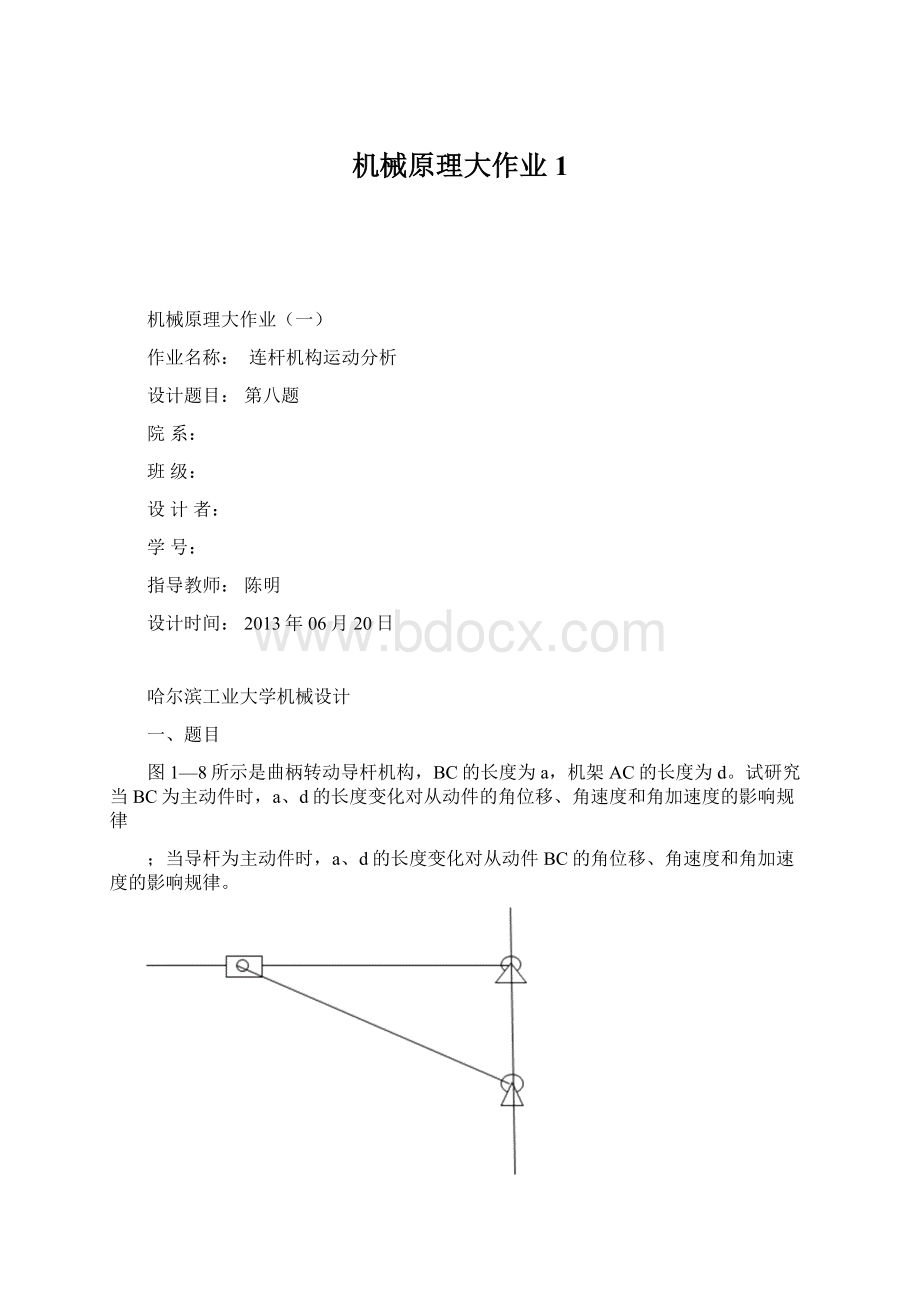
图1—8所示是曲柄转动导杆机构,BC的长度为a,机架AC的长度为d。
试研究当BC为主动件时,a、d的长度变化对从动件的角位移、角速度和角加速度的影响规律
;
当导杆为主动件时,a、d的长度变化对从动件BC的角位移、角速度和角加速度的影响规律。
BA
ad
C
二、机构的结构分析
机构可分为两部分
(1)、RPR杆组
(2)、刚性杆
三、各基本杆组的运动分析数学模型并建立直角坐标系
Y
Wt/ n`
n /w`t`X
1、当AB为主动件时
设角BAC为wt,w为角速度、t为时间、n为角BCA。
由正弦定理可得a/sin(wt)=b/sin(n+wt)
可推出
从动件的角位移n=arcsin(d*sin(w*t)/a)-w*t,,对其求导可得
从动件的角速度v=(d*t*cos(t*w))/(a*(1-(d^2*sin(t*w)^2)/a^2)^(1/2))–t,再对v求导得
从动件的角加速a1=(d^3*t^2*cos(t*w)^2*sin(t*w))/(a^3*(1-(d^2*sin(t*w)^2)/a^2)^(3/2))-(d*t^2*sin(t*w))/(a*(1-(d^2*sin(t*w)^2)/a^2)^(1/2))。
2、当BC为主动件时
设角BCA为w`t`,w`为角速度、t`为时间、n`为角BAC。
由正弦定理可得
从动件的角位移n`=arctan(asin(w`*t`)/(d-a*cosw`*t`)),
从动件的角速度v`=(t`/((d-a*cos(t`*w`))*(1–t`^2*w`^2)^(1/2))-(a*t`*asin(t`*w`)*sin(t`*w`))/(d-a*cos(t`*w`))^2)/(asin(t`*w`)^2/(d-a*cos(t`*w`))^2+1)。
从动件的角加速度a1`=((t^3*w)/((d-a*cos(t*w))*(1-t^2*w^2)^(3/2))+(2*a^2*t^2*asin(t*w)*sin(t*w)^2)/(d-a*cos(t*w))^3-(a*t^2*asin(t*w)*cos(t*w))/(d-a*cos(t*w))^2-(2*a*t^2*sin(t*w))/((d-a*cos(t*w))^2*(1-t^2*w^2)^(1/2)))/(asin(t*w)^2/(d-a*cos(t*w))^2+1)-((t/((d-a*cos(t*w))*(1-t^2*w^2)^(1/2))-(a*t*asin(t*w)*sin(t*w))/(d-a*cos(t*w))^2)*((2*t*asin(t*w))/((d-a*cos(t*w))^2*(1-t^2*w^2)^(1/2))-(2*a*t*asin(t*w)^2*sin(t*w))/(d-a*cos(t*w))^3))/(asin(t*w)^2/(d-a*cos(t*w))^2+1)^2。
五、计算编程
1、AB为主动件
假设w=10rad/s、d=100mm、a=0+1*p,p从1到1000,步长为10,即d/a的取值范围为0.1—100。
1.1、求从动件的角位移程序为
forp=0.1:
10:
100
symst;
symsw;
symsd;
symsa;
w=10;
d=100;
a=0+1*p;
n=asin(sin(w*t)*d/a)-w*t;
v=diff(n);
a1=diff(v);
t=0:
pi/100:
pi/5;
y1=asin(sin(w*t)*d/a)-w*t;
fori=1:
length(t)
y2(i)=subs(v,t(i));
y3(i)=subs(a1,t(i));
end
figure(p)
plot(t,y1)
可得出10个图形去除有代表性的3张d/a比例分别为100、2、1
同理修改程序将比例变为0.95、0.8、0.5
接着将其比例减小为0.2、0.1
结果分析:
由此可得,随着d/a比例的不断减小,但是通过常识可知当a<
d即d/a>
1时AB为主动件其角度不可能为0到2pi所以大于1的图不存在,从小于1可以看出d/a不断减小从动件BC的角位移趋近于一次函数,即变化减缓。
1.2、求从动件的角速度程序为
forp=1
plot(t,y2)
可得出10个图形去除有代表性的3张d/a比例分别为1、0.95、0.8、0.5、0.2,
由角速度曲线可知当d/a的比例不断减小时角速度趋向平稳即最大值与最小值的差值减小,这也符合角位移趋向于一次曲线,峰值处的变化变的尖锐。
另外通过角速度曲线可知0度时速度最大、180度时速度最小。
1.3、求从动件的角速度程序为
forp=500
plot(t,y3)
可得出10个图形去除有代表性的3张d/a比例分别为1、0.95、0.8、0.5、0.2
有图可分析知随着d/a的减小角加速度的幅值减小、在峰值处变化变得光滑,另外角加速度的最大值和最小值分别处于90、270度,和0、180度。
2、BC为主动件
假设w=10rad/s、d=100mm、a=0+1*p,p从50到200,步长为10,即d/a的取值范围为0.5--2。
另外可取有特点的几个数值如d/a=0.1、1、10.
2-1、测从动件的角位移程序为
forp=1000
a=1*p;
n=atan(asin(w*t)/(d-a*cos(w*t)));
y1(i)=subs(n,t(i));
分别得d/a=0.1、0.5、1、10、100时的几个图为
由这几个图像课分析得在d/a<
1时随着d/a的增大角位移的突变减小,d/a=1无法运动,d/a>
1时随着d/a的增大角位移,角位移的变化幅度减小。
2-2、测从动件的角速度程序为
由这几张图可以看出在d/a<
1时随着d/a的增加,速度的幅值减小,d/a>
1时随着d/a的增加速度的幅值变化减小即从动杆件的运动变得平稳
2-3、测从动件的角加速度的变化程序为
forp=100
由角加速度的随d/a的变化图可知在d/a<
1时角加速度的幅值在一定范围内变化减小,在d/a>
1是时速度几乎无变化
六、综合结果分析
A.AB为主动件,BC为从动件。
d/a不断减小从动件BC的角位移趋近于一次函数,即变化减缓。
角速度变化曲线近似于三角函数cos且趋向平稳,即最大值与最小值的差值减小,峰值处的变化变的尖锐,且0度时速度最大、180度时速度最小。
角加速度的变化曲线近似于三角函数sin且幅值减小、在峰值处变化变得光滑,角加速度的最大值和最小值分别处于90、270度。
B.BC为主动件,AB为从动件
d/a<
1时随着d/a的增大角位移的突变减小。
角速度的幅值减小。
角加速度的幅值在一定范围内变化减小。
d/a>
角速度的幅值变化减小即从动杆件的运动变得平稳。
角加速度几乎无变化。
(具体变化可通过图形看出)
 升级会员
升级会员 