北方民族大学010年自控系统总复习题Word格式文档下载.docx
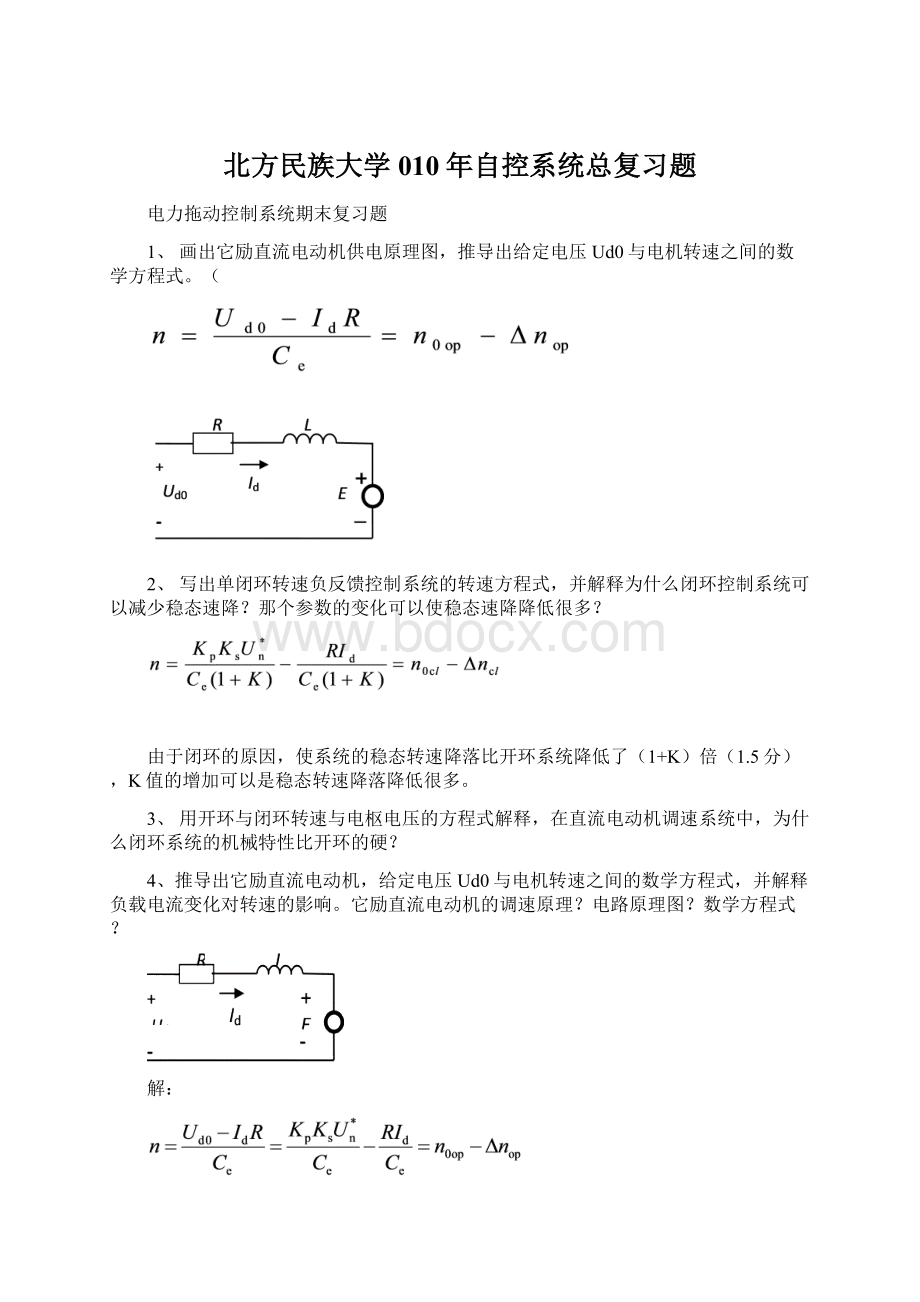
《北方民族大学010年自控系统总复习题Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《北方民族大学010年自控系统总复习题Word格式文档下载.docx(13页珍藏版)》请在冰豆网上搜索。
(5分)
开环时的调速范围
闭环时的调速范围
二者之间的关系
开环调速范围和闭环调速范围的关系,
开环系统和闭环系统的静差率分别为:
二者的关系为:
6、用数学公式解释:
为什么在闭环控制系统中,为满足系统的稳态精度,要求开环放大系数K值越大越好,而为了满足稳定性要求,根据劳斯稳定性判据,K值又不能太大?
由闭环系统的机械特性方程式可以看出:
当K值越大时ncl就越小,所以K值越大,系统的稳态精度就越高。
但由动态结构知,反馈控制闭环直流调速系统的开环传递函数是
式中K=KpKs/Ce
反馈控制闭环直流调速系统的特征方程为
根据三阶系统的劳斯-古尔维茨判据,系统稳定的充分必要条件是
整理后得
所以K值不能大与某个值。
否则系统不稳定。
7、在转速负反馈单闭环无静差调速系统中,突加负载后又进入稳定运行状态,画出各环节的电压变化趋势,并解释系统是如何实现转速调节的。
突加负载后引起电流增大:
各环节的信号变化如下:
IdnUnUnUcUd0n(趋势图)
闭环系统能够减少稳态速降的实质在于它的自动调节作用,在于它能随着负载的变化而相应地改变电枢电压,以补偿电枢回路电阻压降。
8、在转速负反馈单闭环调速系统中,分别采用比例控制、积分控制、比例积分控制,那些有静差?
那些无静差?
为什么要有静差?
为什么能做到无静差?
比例控制为有静差,积分控制、比例积分控制为无静差
在比例控制中ΔUn=U*n-Un,Uct=Kp×
ΔUn,如果ΔUn=0,则调节器输出为0,无调节的作用。
积分控制、比例积分控制能做到无静差是因为含有积分器,积分器在ΔUn=0时,可以保持以前的累积值,使调节器输出不会为0,只要U*n-Un不为0,则积分器就有输出,而当U*n-Un=0时,积分器的输出为以前的累加值,仍然有输出,输出的稳态值与输入无关,而是由它后面环节的需要决定,所以是无静差的。
9、在转速负反馈单闭环调速系统中,那些扰动系统有抑制作用,那些扰动系统无法抑制?
为什么?
画出转速负反馈单闭环调速系统结构图,并将各扰动标在图中。
反馈控制系统对被反馈环包围的前向通道上的扰动都有抑制功能(2分)。
但是,如果在反馈通道上的测速反馈系数受到某种影响而发生变化,它非但不能得到反馈控制系统的抑制,反而会增大被调量的误差
10、控制系统的伯特图如图所示。
1)请回答图中三个段对系统对系统性能的影响。
2)请回答图截止频率对对系统性能的影响。
1)低频段的斜率陡、增益高,系统的稳态精度高
中频段以-20dB/dec的斜率穿越0dB线,系统的稳态性好
高频段衰减越快,即高频特性负分贝值越低,系统的抗高频干扰的能力越强。
3)截止频率ωc越高,系统的快速性越好。
11、为什么要增加电流截止负反馈?
画出带电流截止负反馈的单闭环调速系统的稳态结构图,并给出带电流截止负反馈稳态转速方程式。
直流电机在全电压起动时,如没有限流措施,会产生很大的冲击电流,采用转速负反馈后,系统在突加给定电压时,由于惯性,转速不能立即建立起来,此时反馈电压仍为0,偏差电压=给定电压,使电枢电压为最大值,电流过大。
通过增加电流截止负反馈保证电流基本不变,使它不超过允许值,当正常时,电流控制不起作用。
当Id≤Idcr时
当IdIdcr时
12、某闭环调速系统的调速范围是1500~150r/min,要求系统的静差率S≤2%,那么系统允许的静态速降是多少?
如果开环系统的静态速降是100r/min,则闭环系统的开环放大倍数应有多大?
13、为什么PWM—电动机系统比晶闸管—电动机系统能够获得更好的动态性能?
14、为什么闭环控制系统可以减少稳态速降?
15、在转速负反馈单闭环调速系统中,分别采用比例控制、积分控制、比例积分控制,那些有静差?
可逆PWM变换器的工作原理?
与晶闸管整流电源的区别?
16、电流连续与断续的机械特性有何不同?
17、PWM—直流电机控制电路如图所示,解释实现电机双向控制时VT1-VT4如何变化的并画出VT1-VT4的波形。
18、直流脉宽输出电压方程与晶闸管整流装置的电压方程有何不同?
直流脉宽电源有几种典型形式?
直流脉宽电源是如何实现调压的?
19、画出双闭环环调速系统的动态结构图,在转速、电流双闭环调速系统中,ACR起什么作用?
如果ASR和ACR采用PI调节器,如要改变电机的起动电流,应该调节什么参数?
转速反馈系数增大,转速如何变化?
1)转速调节器的作用:
(1)转速调节器是调速系统的主导调节器,它使转速很快地跟随给定电压变化,稳态时可减小转速误差,如果采用PI调节器,则可实现无静差。
(2)对负载变化起抗扰作用。
(3)其输出限幅值决定电机允许的最大电流。
2)根据PI调节器的工作原理,起动电流的大小由转速调节器的输出限幅值决定,调节ASR的限幅输出就可以调节起动电流或改变电流反馈系数。
3)由公式:
当给定不变,转速反馈系数增大,转速减小。
20、画出反并联可逆系统的基本组成电路图,简述有环流可逆系统的工作原理,用正组逆变、反组整流说明如采用α=β工作制时,控制触发角应如何变化?
解释正组回馈制动时两组整流桥的工作状态和要求,并在图中标出两组整流装置的电压极性。
反并联可逆系统的基本组成电路如下图
有环流可逆系统的工作原理是:
采用配合控制的策略,电动机正转时,由正组晶闸管装置VF供电,正组晶闸管装置工作在整流状态,反组VR则工作在逆变状态。
电动机反转时,由反组晶闸管装置VR供电,反组晶闸管装置VR工作在整流状态,正组VF则工作在逆变状态。
由于两组晶闸管装置相同,两组的最大输出电压Ud0max是一样的,因此,当直流平均环流为零时,应有
cosr=–cosf或r+f=180
如采用α=β工作制,当任何一组的触发角在0<
<
90时晶闸管装置工作在整流状态,当任何一组的触发角在90<
β<
180时晶闸管装置工作在逆变状态。
正组回馈制动:
反组工作在整流状态。
正组工作在逆变状态90<
180,0<
90,要求正组的输出电压Udo要小于反电势E
21、一个V-M系统,已知电动机参数为:
PN=5KW、UN=220V、IN=20A,额定转速nN=1500r/min、Ra=1Ω,整流装置内阻Rpe=1Ω,触发整流环节的放大系数KS=40。
要求调速范围D=30,静差率S≤10%。
试求:
1)计算开环系统的稳态速降和满足调速要求所允许的稳态速降。
2)如采用转速负反馈组成闭环系统,试画出系统的稳态结构图。
3)调整该系统,使给定U*n=12V时转速Id=IN,n=nN,此时转速负反馈系数α为多少?
(认为U*n≈Un)
4)计算所需的放大器放大系数KP。
解:
1)开环系统的稳态速降为:
(4分)
满足调速要求所允许的稳态速降为:
2)转速负反馈系统的稳态结构图:
(3分)
3)当U*n=15V时转速n=1500r/m,则转速负反馈系数α为
4)闭环系统的开环放大系数K为:
所需的放大器放大系数KP为:
22、在转速负反馈单闭环无静差调速系统中,突加负载后又进入稳定运行状态,用各环节的电压变化状态解释系统是如何实现转速调节的。
IdnUnUnUcUd0n
23、对于转速、电流双闭环调速系统,请回答下列问题:
1)在该系统中,ASR和ACR各起什么作用?
如果ASR和ACR都采用PI调节器,它们的输出限幅值应如何确定?
2)若要改变系统的起动电流,应该调节什么参数?
24、什么闭环控制系统可以减少稳态速降?
16、在转速负反馈单闭环调速系统中,那些扰动系统有抑制作用,那些扰动系统无法抑制?
25、对于转速、电流双闭环调速系统,如要改变电机转速,应该调节什么参数?
26、对于转速、电流双闭环调速系统,如要改变电机的堵转电流,应该调节什么参数?
27对于转速、电流双闭环调速系统,如转速给定信号U*n没有变,增大转速反馈系数α,系统稳定后转速反馈电压Un是增加还是减少?
28、在转速、电流双闭环调速系统中,两个调节器ASR、ACR均采用PI调节器。
已知参数:
电动机:
PN=3.7KW,UN=220V,IN=20A,nN=1000r/min,电枢回路总电阻R=1.5Ω,设U*nm=U*im=Uan=8V,电枢回路最大电流Idm=1.5A,电力电子变换器的放大系数Ks=40。
(1)电流反馈系数β和转速反馈系数α;
(2)当电动机在最高转速发生堵转时的Udo、U*i、Ui、Uc值。
29直流脉宽输出电压方程与晶闸管整流装置的电压方程有何不同?
30、直流脉宽电源有几种典型形式?
直流脉宽输出电压方程与晶闸管整流装置的电压方程有何不同?
31、在单闭环调速系统中为什么要增加电流截止负反馈?
画出带电流截止负反馈的单闭环调速系统的稳态结构图和静特性曲线,在双闭环调速系统中为什么不需要加电流截止负反馈?
32、在单闭环转速负反馈调速系统中采用比例积分调节器后可以使系统做到无静差,请解释比例积分调节器在系统中的作用,并画出用运算放大器组成比例积分控制器的线路图。
33、分别写出直流脉宽(PWM)输出传递函数与晶闸管整流装置输出传递函数,二者之间有何区别?
如果直流脉宽的频率大于10KHz时,两种传递函数的延时时间各为多少?
34、设系统的结构图如下图所示:
系统在阶跃输入R(t)=R0,速度输入R(t)=v0t,加速度输入R(t)=v0t2/2时,两种结构图对应的三种输入信号的稳态误差分别为什么值?
35、已知PI调节器的传递函数为:
1)试写出PI调节器时域表达式
2)试写出PI调节器的位置式差分方程
3)试写出PI调节器增量式差分方程
1)给定PI调节器传递函数时域表达式为:
其中Kp=Kpi为比例系数
KI=1/为积分系数
2)离散化的位置式差分方程:
3)离散化的增量式差分方程:
PI调节器的输出:
36、画出反并联可逆系统的基本组成电路图,简述有环流可逆系统的正组整流电动运行和反组逆变回馈制动工作原理,如采用α=β工作制,各自的触发角应在什么范围?
37、在可逆系统中,为什么要用α=β工作制?
实现逆变的条件是什么?
38、掌握所有系统的稳态结构图、动态结构图,组成原理图。
39、掌握位置随动系统的在三种形式输入下的给定误差的稳态值和扰动误差的稳态值的计算方法。
40、给下图补充内容,使其为带电流截止环节的转速负反馈系统。
41、位置随动系统的结构如图所示,请分析:
1)图1系统在单位速度输入下的给定误差的稳态值。
2)图2系统在单位阶跃扰动下的扰动误差的稳态值。
42、设系统的结构图如下图所示:
43、一个V-M系统,已知电动机参数为:
PN=2.5KW、UN=220V、IN=18A,额定转速nN=1500r/min、Ra=1Ω,整流装置内阻Rpe=1Ω,触发整流环节的放大系数KS=40。
要求调速范围D=30,静差率S=5%。
(20分)
试求:
3)调整该系统系统,使给定U*n=20V时转速n=1000r/m,此时转速负反馈系数α为多少?
44、写出单闭环转速负反馈控制系统的转速方程式,并解释
①为什么闭环控制系统可以减少稳态速降?
②哪个参数的变化可以使稳态速降降低很多?
③根据劳斯稳定性判据,计算为了满足稳定性要求的K值应取多大合适?
1)单闭环转速负反馈控制系统的转速方程式
2)由闭环系统的转速方程式可以看出:
当K值越大是△ncl就越小,所以K值越大,系统的稳态速降就越小,稳态精度就越高。
3)比例放大系数KP增大可以使稳态速降降低很多
3)但由动态结构知,反馈控制闭环直流调速系统的开环传递函数是
反馈控制闭环直流调速系统的特征方程为
整理后得
其它为所有所做过的作业
注意:
一定要自己独立的把所有复习题做一遍!
!
 升级会员
升级会员 