北航现代控制理论结课大作业Word格式文档下载.docx
《北航现代控制理论结课大作业Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《北航现代控制理论结课大作业Word格式文档下载.docx(16页珍藏版)》请在冰豆网上搜索。
方向舵偏角(单位为
副翼偏角(单位为
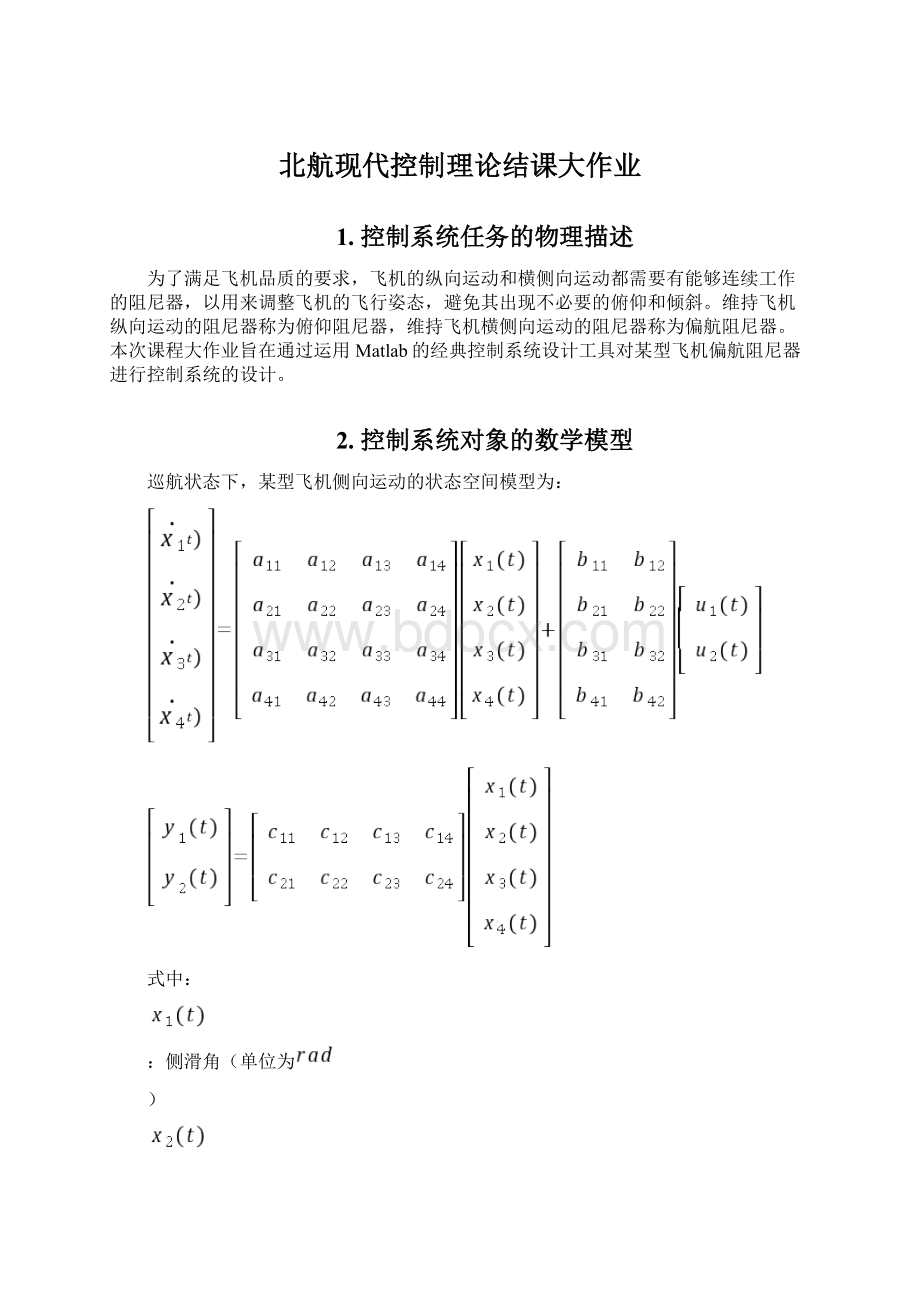
设飞机巡航飞行时的速度为0.8马赫,高度为40000英尺,此时模型的参数为:
首先输入飞机状态空间模型参数。
以及定义系统的状态变量、输入变量及输出变量,并建立状态空间模型。
在Matlab命令窗口中输入如下命令:
>
A=[-0.0558-0.99680.08020.0415;
0.5980-0.1150-0.03180;
-3.05000.3880-0.46500;
00.08051.0000];
B=[0.007290.0000;
-0.475000.00775;
0.153000.1430;
00];
C=[0100;
0001];
D=[00;
00];
states={'
beta'
'
yaw'
roll'
phi'
};
inputs={'
rudder'
aileron'
outputs={'
yawrate'
bankangle'
sys=ss(A,B,C,D,'
statename'
states,'
inputname'
inputs,'
outputname'
outputs)
运行结果如图2-1所示:
图2-1状态空间模型
3.系统特性分析
根据前述系统的状态空间模型,首先分析系统的性能。
3.1.计算开环特征值
在Matlab中计算系统开环特征值,输入:
damp(sys)
所输入系统命令及运行结果如图3-1所示:
图3-1系统开环特征值
绘制零极点图,在Matlab的命令窗口中输入:
pzmap(sys)
运行结果如图3-2所示:
图3-2零极点图
由图可以看出,此模型含有接近虚轴的一对共轭极点,它们对应飞机的荷兰滚模态,此时,系统具有较小的阻尼,控制系统设计的目的是提高系统的阻尼比,改善荷兰滚模态的阻尼特性。
3.2.计算系统的单位脉冲响应
在Matlab命令窗口输入:
impulse(sys)
运行后得到如图3-3所示的单位脉冲相应曲线:
图3-3单位脉冲对应曲线
由图可以看出,系统过渡过程振荡剧烈,飞机确实存在很小的阻尼,图中相应时间较长,而乘客及飞行员关心的是飞机在最初的几秒钟的行为,所以绘制飞机在最初的20s以内的单位脉冲响应曲线。
在Matlab命令窗口中输入:
impulse(sys,20)
所得响应时间为20秒的单位脉冲相应图形如下:
图3-420s单位脉冲对应图形
由上图可以看出,飞机围绕非零倾角产生了震荡,因此在副翼脉冲信号作用下,飞机会发生改变。
图3-5bode图形
使用方向舵偏角作为控制输入,使用偏航角速度作为传感输入,为得到相应的频率响应,在Matlab命令窗口中输入如下命令:
sys11=sys(‘yaw’,’rudder’);
bode(sys11)
运行后的bode图如图3-5所示。
由图可以看出,方向舵的变化对小阻尼的荷兰滚模态具有明显的影响。
4.控制系统的指标
一种比较合理的设计目标是确保自然频率
时,阻尼比
。
5.控制系统的设计
通过以上分析可知,只要通过改变系统的增益,就可确保系统性能得到改善。
首先,应用根轨迹法确定合适的增益值。
rlocus(sys11)
运行后得到的曲线即为负反馈的根轨迹图。
所得图形图5-1所示:
图5-1负反馈根轨迹图
由图可见,采用负反馈连接会使得系统立刻变得不稳定,为确保系统稳定,应当采用正反馈连接。
在Matlab窗口中进一步输入:
rlocus(-sys11)
sgrid
运行后得到正反馈的根轨迹图如图5-2所示:
图5-2正反馈根轨迹图
然后继续构成单输入单输出闭环反馈回路,在Matlab命令窗口中输入如下命令:
k=2.85;
cl11=feedback(sys11,-k);
运行后得到负反馈系统cl11,如图5-3所示:
图5-3负反馈系统
由下述的Matlab命令求取系统响应时间为20s的单位脉冲相应,并将其与前述的开环系统单位脉冲响应作比较。
图5-4响应曲线
impulse(sys11,cl11,’o-‘,20)
运行后得到如图5-4所示的闭环系统的单位脉冲响应曲线。
由上图可以看出,与开环系统单位脉冲相应相比,闭环系统响应速度快,并且没有产生很大的震荡。
将全部多输入多输出模型构成闭合回路,分析在副翼输入信号作用下的响应。
将系统由输入1连至输出1,构成反馈回路,在Matlab中输入如下指令:
cloop=feedback(sys,-k,1,1);
damp(cloop)
运行结果如图5-5所示:
图5-5反馈回路
图5-6脉冲响应曲线
绘制多输入多输出模型的脉冲响应曲线,在Matlab命令窗口输入:
impulse(sys,’-.’,cloop,20)
运行后得到的脉冲响应曲线如图5-6所示。
由图可以看出,偏航角速度响应具有很好的阻尼比,但是从副翼(输入2)到倾斜角(输出2)通道可见:
副翼变化时,系统不再像常规飞机那样连续偏转,而是呈现出稳定的螺旋模态,螺旋模态是一种典型的非常慢的模态,它允许飞机滚转和偏转而无需恒定的副翼输入。
为此,希望能够消除螺旋模态,使它具有很高的频率。
当形成闭环时,要确保螺旋模态不能进一步移动到左半平面。
应当使用下洗滤波器的设计。
即:
通过在原点处设置1个零点的方式,下洗滤波器将螺旋模态的极点控制在原点附近,当时间常数为5秒时,选择
,应用根轨迹法确定滤波器增益
,首先确定滤波器的固定部分,在Matlab命令窗口中输入:
Gc=zpk(0,-0.2,1)
运行结果如图5-7所示:
图5-7固定部分
然后将此滤波器与设计模型sys11以串联的形式连接,得到开环模型,在Matlab中输入
oloop=Gc*sys11;
然后绘制此开环模型的另一个根轨迹图并加入网格线,在Matlab命令中输入:
rolcus(-oloop)
运行后得到开环模型的根轨迹如图5-8所示:
图5-8根轨迹图
在确定阻尼比的情况下,得到开环增益如下图所示:
此即为开环根轨迹曲线,可以看出在阻尼比为0.3左右时,增益约为2.02。
6.系统仿真结果分析
6.1.观察从方向舵到偏航角速度通道的闭环脉冲响应:
首先形成闭环回路,在Matlab命令窗口输入:
k=2.07;
cl11=feedback(oloop,-k);
impulse(cl11,20)
运行后得到单位脉冲响应曲线如图6-1所示:
图6-1单位脉冲响应曲线
由上图可见,此时响应良好,但阻尼比小于前面的设计。
6.2.验证设计的下洗滤波器固定了飞机的螺旋模态问题
构成完整的下洗滤波器,在Matlab命令窗口中输入:
WOF=-k*Gc;
将多输入多输出模型sys的第1对输入/输出通道闭合并求取其单位脉冲相应。
在Matlab命令中输入:
cloop=feedback(sys,WOF,1,1);
运行后得到的单位脉冲响应如图6-2所示:
图6-2单位脉冲响应
由图可见,相对于副翼(输入2)脉冲输入的倾斜角(输出2)响应在较短的时间内具有所期望的几乎不变的特性。
图6-3单位脉冲曲线
其单位脉冲相应曲线可以进一步的得到如图6-3所示。
基本上满足了设计要求。
7.结论
本次控制系统的设计,尽管没有完全的符合阻尼比的要求,但已经充分增加了系统的阻尼比,并可以保证飞行员能够正常的驾驶飞机,达到了最初的设计目的。
 升级会员
升级会员 