双足机器人系统平衡控制设计毕业设计论文Word文档格式.docx
《双足机器人系统平衡控制设计毕业设计论文Word文档格式.docx》由会员分享,可在线阅读,更多相关《双足机器人系统平衡控制设计毕业设计论文Word文档格式.docx(45页珍藏版)》请在冰豆网上搜索。
更重要的是,人们模仿自身行走方式设计的双足机器人,最适合在人类生活和工作的环境中与人类协同工作,绝不需要专门为其对环境进行大规模的改造。
因此,人们对双足机器人寄予了很大的期望:
照顾老弱病人的护理人、与人类开展足球比赛的运动员,以及在核电站、深海等危险环境中作业,甚至是与人类一起探索外星的伙伴。
最后,也可以通过对双足机器人的研究平台来检验控制理论及控制仿发的有效性、实用性、完整性、延伸性,即对控制理论有着检验和向前走得更远的指示作用。
由于对双足机器人的研究具有十分重大的理论意义和实际价值,世界各国都给予高度重视,先后推出了各自的研究计划。
其中,日本在该领域的研究投入力度最大,美、法、德、韩等国也相继启动了各自的研究计划。
在国家高技术研究发展计划(863计划)和国家自然科学基金的支持下,我国众多高校和研究机构也将双足机器人的研究和开发列入研究重点。
1.2双足机器人的国内外研究状况
近年来,世界各国的科学家和研究者在双足机器人的稳定性能、步行移动控制、样机研制等方面进行了许多有意义的探索。
本节将从双足机器人的研究状况和欠驱动行走双足机器人两个方面,来回顾双足机器人的发展历程。
1.2.1国外研究状况
就机器人的研究历程来看,美国是最早研究的国家,但后来日本将半导体与机械技术结合,从而在机器人这一领域超过了美国,位居世界主流。
目前,由日本研究治造的机器人大约占世界的80%。
双足机器人的研制开始于这个世纪的六十年代,虽然只有四五十年的历史,然而双足机器人的研究工作进展十分迅速。
国内外很多专家人士从事双足机器人的研究,如今已成为机器人技术研究领域的主要方向之一。
国际上许多国家都投入很大精力对双足机器人进行研究,但各个国家都有着自己侧重的研究方向:
日本偏向于模拟人的动作与生活特性;
欧洲偏向于从疗服务方面着手;
美国则主要从军事方面去考察研究。
1.日本的研究概况
(1)日本本田公司
在一九八六年日本本田公司科研人员开始对仿人机器人进行研究开发,本田公司对人们在生活中的动作特性,对机器人朝着“机动性”、“智能性”这个方向进行探索研究,他们的理念是:
“机器人可以与人类互不侵犯的相处,让机器人替代人做事情并完成人类不能完成的事情,这样可以从新的领域为人类创造出更多的新财富。
”并于1986年至1993年间先后研制出E(ExperimentalModel)系列的实验型机器人E1~E6,,并都以双足进行移动,他们的目的在于对双足机器人的理论方面进行更深入的探索及实现,并运用了地面反力控制、ZMP控制、摆动腿落地位置控制来完成双足机器人的行走[3]。
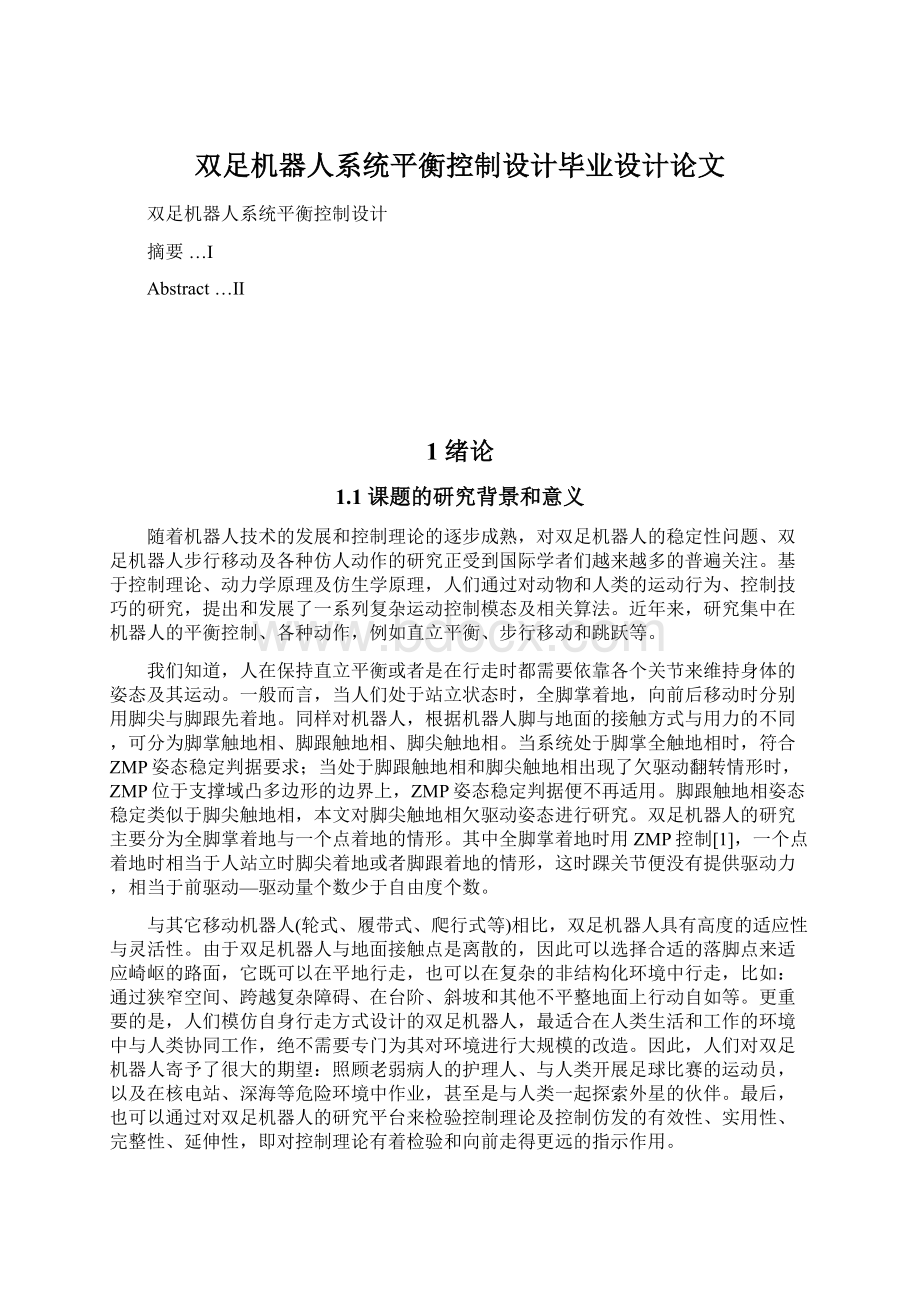
从1993年开始,本田公司又着手对P(PrototypeModel)系列P1、P2、P3仿人机器人进行研究,与1996年成功研制出HODON第二代仿人机器人P2样机(如图1-1a所示),身高182cm,体宽60cm,体重210kg,共有30个自由度,同时P2的推出成为世界上第一台无缆的防人机器人,它能完成以一定的速度行走及上下楼梯等动作。
第二年,本田公司又在P2的基础上推出了P3(如图1-1所示),它在外形上与P2相似,能在斜面上行走和单腿站立。
于二零零年,日本本田公司又推出了ASIMO型防人机器人(如图1-1c所示),高120cm,体重43kg,共有26个自由度。
ASIMO是AdvancedStepinInnovativeMobility的简称,能与互联网进行无线链接,具有语音识别和听说的功能。
由于ASIMO运用了新型开发的双足步行技术,可以更加自由顺畅的行走,其速度甚至可达2.5km/h[10]。
此外,由于2005年推出新一代的ASIMO防人机器人,高130cm,体重54kg,一共有34个自由度。
与起初相比,新型ASIMO可以与人一起受牵手走路,实现手推车与搬运东西的功能,强化了机器人的运动能力。
图1-1HODON仿人机器人
.Fig1-1TheHODONHuamoidRobot
(2)日本索尼公司
索尼公司于2000年11月公布了娱乐型防人双足机器人SDR-3X,它是SonyDreamRobot的简写。
其规格为身高50cm,体宽22cm,重5kg,属于小型化的机器人,共含有24个自由度。
SDR-3X能够实现以下几种动作功能:
第一,可以达到14m/min的速度行驶,并能朝前后左右四个方向移动;
第二,可以实现左右九十度的异步转身;
第三:
可以在斜面上行走及完成单腿站立;
第四,能够在平面上完成仰卧和府卧装填;
第五,能完成踢球、跳舞娱乐动作。
2003年,索尼公司又推车了最新型的SDR型防人机器人,即SDR-4XII防人机器人(如图1-2所示),它是SDR-4X的升级。
SDR-4XII身高58cm,体重7kg,一共含有38个自由度。
现在,它的名字改称为QRIQ。
由于QRIQ的驱动器将电机与控制电路集于一起,并加以空中姿态的一些控制算法,成为一台能在斜面上走动、能跑能跳的双足机器人,给人们带来了乐趣和愉悦。
图1-2索尼仿人机器人SDR-4XII
Fig.1-2TheSonyHumanoidRobotSDR-4XII
(3)日本产业技术综合研究所HPR系列的研制
于一九九八年,日本产业技术综合研究所开始对仿人机器人进行研究,并以本田公司P3为原型,经过五年时间,研制出HRP-2(HPR是HumanoidRoboticsProject的简称)。
HRP-2身高155cm,体重54kg,含有32个自由度,能达到2千米/小时的行走速度。
有特点的是,HRP-2在腰部增加了两个自由度,是其在绊倒时可以像人一样爬起,与本田公司研制的ASMIO相比,身体上部更具有灵活性。
同时能实现在不平地面上行走及在空中翻倒与恢复技术。
2005年,日本产业综合研究所及川田工业联合研制出了HRP-3防人机器人。
该机器人具有防水防尘功能,在10cm/h的雨中也能工作,并且在易滑路面也能以大约0.4m/s的速度行走。
目前,HRP项目更致力于应用技术上研究,已经实现与人配合抬桌椅、开铲车等功能。
2.美国研究概况
早在1948年,美国阿贡实验室研制了工业机器手,主要用于一些比较危险的境况,代替人类对危险性材料进行操作,减少工作人员的伤害。
后来于一九九八年,麻省理工学院研制出名为COG的仿人机器人,它利用轮子滚动方式行走,该机器人被很多科学家称作是研究智能算法的优越平台。
美国俄核俄大学郑元芳博士利用神经网络算法实现了双足机器人的步态规划,并研制出双足机器人SD-1、SD-2,其中SD-1含有4个自由度,SD-2含有8个自由度。
1986年SD-2机器人实现了前后、左右方向的行走,并在1990年通过修正,实现了斜面上的行走。
W.T.Miller在SD-2机器人基础上,增加了膝关节,并引入CMAC神经网络算法到机器人的行走过程中,实现了周期性的稳定步态。
另外,J.E.Pratt和G..A.Partt等人在研究SpringFlamingo双足机器人的过程中提出了虚拟模型控制策略VMC,对双足机器人的研究制造做了大量有益的工作。
3.韩国研究概况
于二零零二年一月,韩国先进科学研究所O.Junho教授正式开始对智能机器人的研发,经过两年,研制出能行走的智能机器人KHR-1。
KHR-1身高120cm,体重48kg,共含有21个自由度。
在2003年得12月,又研制出KHR-2的机身,经过进一步修正,于2004年8月KHR-2实现了撤线行走功能,其中KHR-2共有41个自由度,身高120cm,体重54kg。
2004年,科学技术院又成功研制了“HUBO”双足仿人机器人(如图1-3所示),该机器人身高1.25m,体重55kg,41个关节能够轻柔转动,其中5个手指能够单独地活动,可以与人握手,跳一些简单的舞蹈。
图1-3KHR_2和HUBO仿人机器人
Fig.1-3TheKHR_2andHuboHumanoidRobot
除了上述国家及单位外,还有许多机构也对双足机器人进行了深入的探索研究,如德国的慕尼黑技术大学研制的Johnnie双足机器人,法国的BIP2000机器人项目,英国对双足机器人的Shadow项目等,他们都对仿人双足机器人的算法及实现作了研究,并取得重大的成果。
1.2.2国内研究状况
我国从上个世纪八十年代初许多高校开始对双足机器人进行研究,而后并将双足机器人的研究列入863计划及国家自然科学基金的重要项目,并给予很大支持。
早在1986年,哈尔滨工业大学开始对防人双足机器人进行研究,在傅佩堔教授的带领下成功研制了HIT-I双足静态步行机器人,身高1.1米,体重70千克,共有10个自由度,能够是平地的前后左右行走及上下阶梯运动,不幅达0.45米,步速约10秒/步。
在HIT-1的基础上,后来又成功地研制了HIT-II、HIT-III,它们在步长和步速上都有了较大的改善。
于2004年,哈工大成功研制了可以踢足球的小型机器人;
在2005年,研制了中国第一台具有面部表情的防人机器人。
国防科技大学于一九九八年成功地研制了双足机器人KDW-I,它具有6个自由度,能前后行走、上下阶梯,最大步幅可达0.4m,步速可达4秒/步。
第二年,又研制出KDW-II,高0.69米,重13千克,共有10个自由度,在KDW-I的功能基础上实现向左右方向的移动。
1990年,在KDW-II基础上增加了两个垂直关节得到KDW-III,进一步实现转弯功能。
经过深入的研究,于2000年底成功研制出国内首台仿人双足机器人,取名为“先行者”(如图1-4所示)。
“步行者”高140厘米,体重20千克,可以在具有一定偏差及不确定的环境中行走。
2003年又推出第四代仿人机器人,该机器人具有新型的运动特性并实现了无缆行走[4~5]。
图1-4HIT-III、HIT足球机器人、“先行者”
Fig.1-4HIT-III、HITfootballrobot、Forthgoer
北京理工大学在归国博士黄强教授的带领下,于2002年成功研制出仿人机器人BHR-1(如图1-5所示)。
该机器人身高1.58米,重76千克,共具有32个自由度,步幅可达0.33米,步速达每小时1千米。
该机器人具有多项功能,除了能前后、左右行走,完成转弯、上下阶梯外,还具有视觉、力觉、语音觉、平衡觉等功能,利用这些功能可以实现在未知地面的情况下的平衡调节及完成太空拳等表演动作。
在BHR-1的基础上于2005年成功研制了BHR-2(简称“汇童”),它身高160厘米,体重63千克。
在几本功能上,BHR-2突破了一些复杂的综合设计,能实现模仿人打太极拳、耍刀术等复杂动作,这标志着我国研制机器人的水平有了很大的提高和突破,并在国际上成为第二个探索出无缆行走,将控制、机构、电源、传感器集为一起的国家。
图1-5BHR_1、BHR_2、THBIP_1
Fig.1-5BHR_1、BHR_2、THBIP_1
此外,1999年上海交通大学研制出SFHR机器人,共有46个自由度,步长10厘米,周期3.5秒。
该机器人装有一个三轴倾斜与两个单轴陀螺,用来检测机器人的姿态变化信息,并配有主动视觉系统,是研究机器人学、控制算法的很好平台。
在985计划的支持下,清华大学研制出THBIP-I防人机器人,高170厘米,体重130千克,共含有32个自由度。
后来,又研制了THBIP-2,并可以快速移动。
南京航天航空大学曾研制了NAIWAR_1,共有8个自由度,具有静态步行功能。
除了上述高校外,国内还有很多高校与单位都对双足机器人有深入的研究,并取得重大的研究成果。
1.2.3欠驱动双足机器人
①欠驱动双足机器人的发展历程
欠驱动双足机器人是为了研究高速动态步行而提出的一种机器人结构。
由于现实世界的地面情况是很难事先精确获取的,这就需要双足机器人的支撑踝关节能够柔顺,适应未知地面。
当支撑踝关节的控制力矩为零时,双足机器人与地面间达到完全柔顺,其模型近似等价于踝关节完全被动的无脚双足机器人。
无脚动态步行是双足步行领域的研究难点之一,当机器人没有脚时,机器人支撑腿与地面间无法输入控制力矩,因而机器人不能实现静态步行,必须通过不断的迈步实现动态行走。
最早对欠驱动机器人进行研究的是MIT的LegLaboratory。
SpringTurkey(图1-6)是其1994到1996年制作的平面型机器人,具有主动的膝和髋关节,高60cm,重10kg,通过无驱动横杆保持侧向平衡。
1997年,几个法国国家实验室在法国科学研究中心(CNRS)和法国国家研究委员会(FNRS)的资助下,启动研制平面欠驱动双足机器人的计划;
1998年美国密歇根大学Grizzle等人加入到该项目中,为该项目提供控制理论方面的指导[68];
2003年该研究小组研制出样机Rabbit(图1-7),RABBIT是一个平面型双足机器人,由两个髋关节和两个膝关节组成,与地面点接触,通过无驱动长杆保持侧向稳定。
该机器人高1.425米,重36公斤,没有脚,前进过程中每只脚相当于一点着地,侧面连接一根长杆防止其侧翻,但不控制其向前的运动,机器人沿圆周行走。
图1-6SpringTurkey图1-7Rabbit
Fig.1-6SpringTurkeyrobotFig.1-7Rabbitrobot
目前国内对欠驱动双足机器人的研究还比较少,主要有清华大学、国防科技大学等。
②欠驱动双足机器人特点及研究意义
欠驱动双足机器人是一个崭新的研究平台,相比全驱动双足机器人,具有如下鲜明的特点:
1)能效较高,速度较快。
全驱动机器人采用大力矩和高增益反馈的驱动系统以控制和改变机器人的动力学特性,普遍存在能耗大等问题;
虽然被动式双足步行机器人在能效方面表现最出色,但系统不可控,实际应用价值不明显。
欠驱动双足机器人踝部没有驱动关节,机器人与地面点接触处于被动状态,其他内关节为主动关节,机器人充分利用重力和惯性力的驱动运动,是一种介于被动和全驱动机器人之间的机器人,有与人类步行相似的能量效率,速度较快,具有很高的应用价值。
2)扩展双足步行关节运动模式。
由于运动规划和控制方式的局限性,全驱动双足机器人普遍存在动作僵硬问题;
人类在行走过程中应用了多种不同的驱动模式,包括无驱动、欠驱动、完全驱动、冗余驱动等。
欠驱动双足机器人强调充分利用机器人自身固有的被动动力学特性,这种特点使得欠驱动双足行走机器人一方面具有较为自然的机械步态;
另一方面也有利于近一步揭示双足步行运动的机理及控制规律。
3)ZMP稳定判据不再适用。
欠驱动双足机器人需要不断变换支撑点来获得动态平衡,体现了支撑点的变化性和离散性,更符合双足运动的特点。
欠驱动双足机器人的研究将拓宽双足机器人的稳定判定理论。
1.3欠驱动双足机器人控制存在的问题
欠驱动双足机器人研究虽然在实验室和理想环境下已经取得了一些成果,但要双足机器人实现象人类一样的真正动态和稳定的快速行走,还存在一系列问题,主要有:
1)双足步行系统模型还不完善。
目前欠驱动双足步行系统模型对足与环境间的动态接触多假设为刚性接触,并未考虑接触点间的局部信息,而在动态步行过程中,双腿相互支撑转换时与地面频繁接触,影响和破坏机器人行走稳定性。
因此,考虑足与地面间的碰撞冲击是双足步行系统建模中的重要组成部分。
2)欠驱动双足机器人的稳定性存在依赖
正如RABBIT欠驱动双足机器人,当机器人与地面点接触时,通过无驱动长杆保持侧向稳定,借助侧面连接一根长杆防止其侧翻,控制机器人沿圆周行走,这时的稳定性在一定程度上依赖于侧杆的作用。
3)双足机器人的仿真平台不具有普适性。
很多研究机构都开发了相应的双足机器人仿真平台,由于大多数的仿真平台是专用的,在机器人结构等发生改变或者其他研究者需要借用时,往往需要大量修改代码,因此其适用范围受到限制。
综上所述,根据人类生活的特性和步行的特点建立一种恰当的双足机器人模型,利用有效的控制方法使得欠驱动双足机器人平衡得到有效控制,这将对对双足机器人的研究有重大的作用,并借助更普适性的仿真平台来仿真研究,为更多的研究者所接受。
1.4本文的研究工作
本文首先需要分析双足机器人的欠驱动姿态,建立双足机器人的物理模型;
其次需要从能量和力的角度对物理模型加以数学描述,得出数学模型;
同时还需要分析欠驱动姿态的可控性与能观测性,并借鉴单杠体操机器人在倒立平衡位置的控制[2],利用线性二次调节器LQR实现双足机器人的欠驱动直立平衡。
仿真实现部分:
结合MATLAB的符号运算,搭建了SIMULINK控制器模块,得出三节杆的角度与角速度的收敛曲线;
通过分析,仿真结果曲线的稳定性证明利用线性二次型调机器LQR能够实现对双足机器人欠驱动姿态的平衡控制;
同时双足机器人是欠驱动多输入多输出复杂系统的典型例子,通过研究双足机器人在欠驱动下的平衡控制,可以很好的检验控制理论和控制方法在非线性、欠驱动、多变量复杂系统控制上的有效性。
1.5论文的构成
第1章为绪论部分,介绍了课题的研究背景和意义、双足机器人的国内外研究状况,立足于双足机器人欠驱动姿态的平衡控制这个出发点去研究与利用线性二次型调机器控制的方法。
第2章,相对于全脚掌着地的ZMP控制,分析了双足机器人的欠驱动姿态,建立三连杆物理模型;
其次从能量和力的角度对物理模型加以数学描述;
并对仿真模型Matlab符号运算及Simulink模块进行介绍。
第3章,对双足机器人平衡的控制目标进行了分析,由于双足机器人系统的欠驱动姿态是不稳定的,其中含有开环特征根位于S右半平面,需加以控制,所以对状态方程模型进行能控性与能观测性分析。
第4章,本章介绍了双足机器人的平衡控制策略:
借鉴单杠体操机器人在倒立平衡位置的控制,介绍线性二次型最有控制的几本原理,通过分析可以建立状态方程利用LQR实现对双足机器人的欠驱动直立平衡控制。
第5章,本章是仿真实验部分。
首先通过Matlab符号运算及函数的功能,搭建控制器的Simulink模块;
其次是对仿真结果的有效性分析,由仿真得出三根连杆的三个角度与三个角速度的变化曲线,收敛到零刻度平衡位置,证明LQR控制器对双足机器人欠驱动姿态平衡控制的有效性。
第6章,本章是结论部分,一方面对本文作出了概括性地总结,另一方面对双足机器人欠驱动姿态的平衡控制和其他研究领域的衔接及进一步研究提出展望。
2双足机器人直立平衡控制的模型研究
2.1.双足机器人的欠驱动姿态
2.1.1模型简化的提出
关于双足机器人的直立平衡与移动正在被国际上很多学者广泛的进行研究[14-21]。
研究的重要方法之一就是推导出双足机器人的一个最适合的精确模型。
因为最原始双足机器人模型是一个多变量、高阶次、变结构、非线性和强耦合的复杂动力学系统,对如此复杂的系统进行研究是困难的,因此我们必须在某种恰当的条件下进行转化和简化,当然这种转化和简化必须具备真实可行性和复原性,其简化模型如图2-1-1所示。
(a)简单的人体模型(b)进一步简化的简单人体模型
图2-1-1人体简化模型
Fig2-1-1.Bodysimplifiedmodel
研究表明:
双足机器人在稳定件下,能够实现上半躯体与下半身躯体的运动解藕,并且对下半身躯体的各个关节角和连杆很容易实施角度规划[22]这为我们上面所提出的复杂模型提供了有效的理论依据:
我们便可以对模型进行解耦,分别对上身躯与下身去进行控制,并对下身躯关节角度进行轨迹规划。
2.1.2双足机器人欠驱动姿态分析
我们知道,人在行走时以双腿交替的方式进行移动。
当需要向前移动是,其中一只脚为支撑,另一只脚向前迈出一步,迈出在空中的那只脚都有绕脚尖旋转的过程,并且在落地的瞬间脚跟先着地,随后便是整只脚落地的过程。
当向后移动时,同理支撑脚保持不动,另一只脚向后退一步,退后的那整只脚在空中有绕脚后跟旋转的过程,这时是脚尖先着地,然后整只脚落地。
其整个过程如图2-1-2所示。
(a)双脚着地(b)人向前移动(c)人向后移动
图2-1-2人体站立及前后移动与地接触状态
Fig.2-1-2Peoplestandupandmovebackandforthwithaccesstostate
在平面上,用单腿连杆来表示双足机器人的姿态模型,躯干、大腿和小腿、脚都分别用一连杆来表示,髋关节、膝关节及踝关节是驱动关节,并且它们之间无摩擦。
假设机器人的脚与水平地面之间的摩擦力有足够的大,没有滑动。
按机器人脚与地面间的接触情况,可分为脚跟触地相、脚尖触地相和脚掌全触地相三种状态[23],如图2-1-3所示。
图2-1-3双足机器人脚地接触状态
Fig.2-1-3Bipedrobotfootcontactstate
当处于脚跟触地相和脚尖触地相出现了欠驱动翻转情形时,ZMP位于支撑域凸多边形的边界上,ZMP姿态稳定判据便不再适用[1]。
脚跟触地相姿态稳定类似于脚尖触地相,本文对脚尖触地相双足机器人的欠驱动姿态进行研究。
2.2物理模型
人体站立受扰后恢复平衡的实验表明,站立姿态平衡的恢复是多关节协调运动过程,在平衡恢复过程中,髋关节对平衡恢复的贡献最大,膝关节最小[24],因此本文将大腿和小腿视作一体,并将机器人各组成部分看作由具有质量的刚性杆连接而成,分别将脚掌、大腿和小腿、躯干各视为一杆。
这样,就可以将前向平面内具有欠驱动自由度的双足机器人系统看作三关节体操机器人系统,仿人机器人的踝、髋关节分别对应体操机器人的肩、髋关节,并将姿态稳定控制问题转化为垂直向上不稳定平衡点的控制问题,模型如图2-2所示。
图2-2双足机器人欠驱动姿态模型
Fig.2-2Bipedrobotunderactuatedattitudemodel
假设,三根杆的长度分别为L1,L2,L3;
质心轴心距为l1,l2,l3;
质量为m,m2,m3;
以质心为转动轴时的转动惯量为J1,J2,J3;
三杆与垂直方向的夹角分别为
,以倒立位置为零度
 升级会员
升级会员 