Vector control motorWord下载.docx
《Vector control motorWord下载.docx》由会员分享,可在线阅读,更多相关《Vector control motorWord下载.docx(44页珍藏版)》请在冰豆网上搜索。
AC
synchronous
and
inductionmotors.[2]
Itwasoriginallydevelopedforhigh-performancemotorapplicationsthatarerequiredtooperatesmoothlyoverthefull
speed
range,generatefull
torque
atzerospeed,andhavehighdynamicperformanceincludingfast
acceleration
anddeceleration.However,itisbecomingincreasinglyattractiveforlowerperformanceapplicationsaswellduetoFOC'
smotorsize,costand
powerconsumption
reductionsuperiority.[3][4]
Itisexpectedthatwithincreasingcomputationalpowerofthemicroprocessorsitwilleventuallynearlyuniversallydisplacesingle-variable
scalar
volts-per-Hertz
(V/f)control.[5][6]
Contents
[hide]
∙1
Developmenthistory
∙2
Technicaloverview
∙3
Applicationrecap
∙4
Seealso
∙5
References
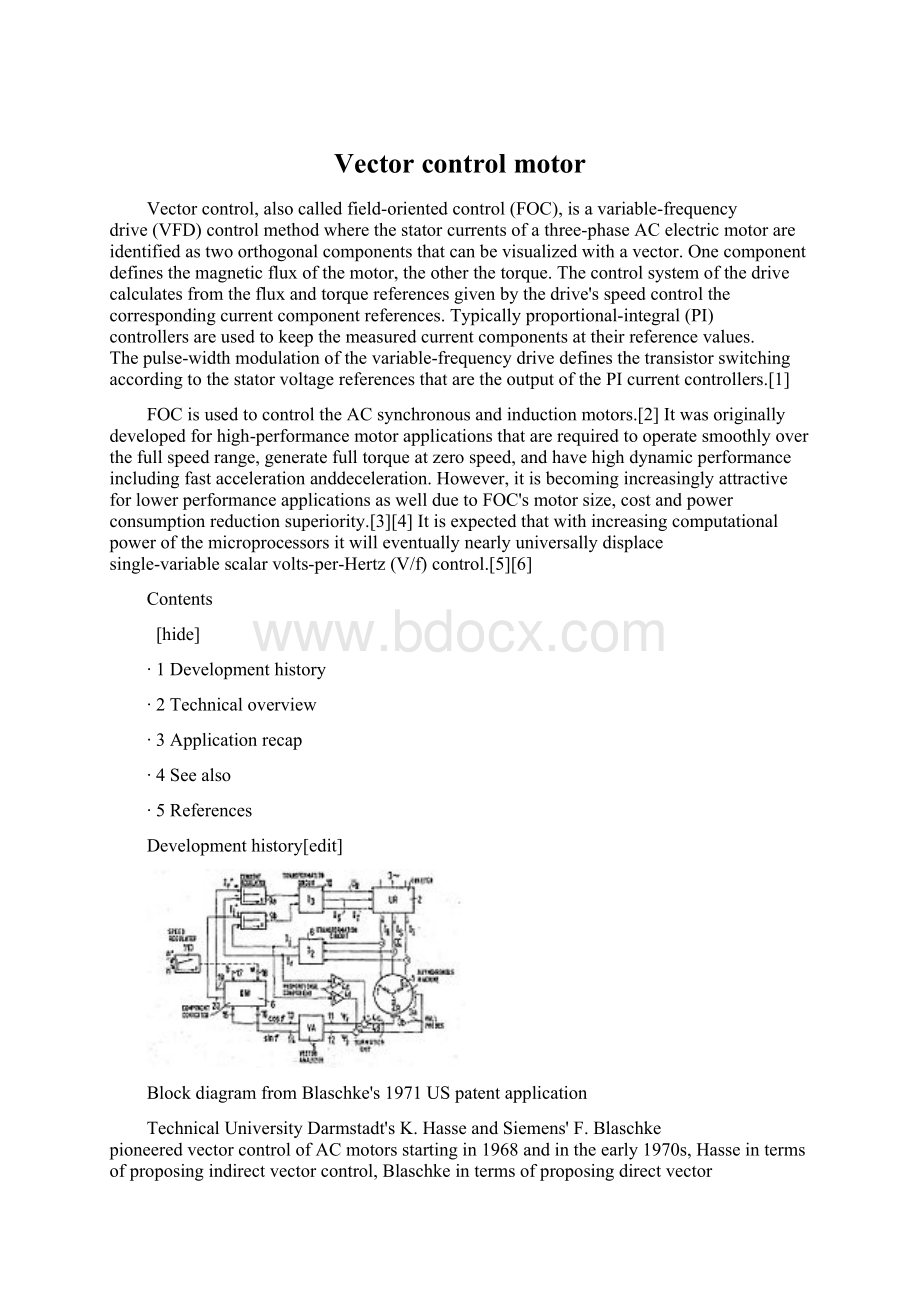
Developmenthistory[edit]
BlockdiagramfromBlaschke'
s1971USpatentapplication
TechnicalUniversityDarmstadt'
sK.HasseandSiemens'
F.Blaschkepioneered
vector
controlofACmotorsstartingin1968andintheearly1970s,Hasseintermsofproposingindirectvectorcontrol,Blaschkeintermsofproposingdirectvectorcontrol.[7][8]
TechnicalUniversityBraunschweig'
sWernerLeonhardfurtherdevelopedFOCtechniquesandwasinstrumentalinopeningupopportunitiesfor
ACdrives
tobeacompetitivealternativeto
DCdrives.[9][10]
Yetitwasnotuntilafterthecommercializationof
microprocessors,thatisintheearly1980s,thatgeneralpurposeACdrivesbecameavailable.[11][12]
BarrierstouseofFOCforACdriveapplicationsincludedhighercostandcomplexityandlowermaintainabilitycomparedtoDCdrives,FOChavinguntilthenrequiredmanyelectroniccomponentsintermsofsensors,amplifiersandsoon.[13]
The
Parktransformation
haslongbeenwidelyusedintheanalysisandstudyof
andinductionmachines.ThetransformationisbyfarthesinglemostimportantconceptneededforanunderstandingofhowFOCworks,theconcepthavingbeenfirstconceptualizedina1929paperauthoredby
RobertH.Park.[14]
Park'
spaperwasrankedsecondmostimportantintermsofimpactfromamongallpowerengineeringrelatedpaperseverpublishedinthetwentiethcentury.ThenoveltyofPark'
sworkinvolveshisabilitytotransformanyrelatedmachine'
slinear
differentialequationsetfromonewithtimevaryingcoefficientstoanotherwithtime
invariant
coefficients.[15]
Technicaloverview[edit]
OverviewofkeycompetingVFDcontrolplatforms:
VFD,withsensororsensorless
Scalarcontrol
V/f(VoltsperHertz)control
Vectorcontrol
DTC(Directtorquecontrol)
DSC(Directself-control)
SVC(Spacevectormodulation)
FOC(Field-orientedcontrol)
DirectFOC
IndirectFOC
SignalFlowGraph(SFG)forInductionMotor
SFGEquations
(d,q)CoordinateSystemSuperimposedonThree-PhaseInductionMotor[16]
SimplifiedIndirectFOCBlockDiagram
[3]
[17][18]
SimplifiedDirectFOCBlockDiagram
[19]
SensorlessFOCBlockDiagram
[20][21]
WhiletheanalysisofACdrivecontrolscanbetechnicallyquiteinvolved("
Seealso"
section),suchanalysisinvariablystartswithmodelingofthedrive-motorcircuitinvolvedalongthelinesofaccompanying
signalflowgraph
andequations.[20]
Invectorcontrol,anACinductionorsynchronousmotoriscontrolledunderalloperatingconditionslikeaseparately
excited
DCmotor.[22]
Thatis,theACmotorbehaveslikeaDCmotorinwhichthefieldfluxlinkage
armature
fluxlinkagecreatedbytherespectivefieldandarmature(ortorquecomponent)currentsare
orthogonally
alignedsuchthat,whentorqueiscontrolled,thefieldfluxlinkageisnotaffected,henceenablingdynamictorqueresponse.
Vectorcontrolaccordinglygeneratesathree-phase
PWM
motorvoltageoutputderivedfroma
complexvoltagevectortocontrolacomplexcurrentvectorderivedfrommotor'
sthree-phasemotorstatorcurrentinputthrough
projections
or
rotations
backandforthbetweenthethree-phasespeedandtimedependentsystemandthesevectors'
rotatingreference-frametwo-coordinate
timeinvariantsystem.[23]
Suchcomplex
motorcurrentspacevectorcanbedefinedina(d,q)coordinatesystemwithorthogonalcomponentsalongd(direct)andq(quadrature)axessuchthatfieldfluxlinkagecomponentofcurrentisalignedalongthedaxisandtorquecomponentofcurrentisalignedalongtheqaxis.[22]
Theinductionmotor'
s(d,q)coordinatesystemcanbesuperimposedtothemotor'
sinstantaneous(a,b,c)three-phase
sinusoidal
systemasshowninaccompanyingimage(phasesa&
bnotshownforclarity).Componentsofthe(d,q)systemcurrentvector,allowconventionalcontrolsuchasproportionalandintegral,or
PI,control,aswithaDCmotor.
Projectionsassociatedwiththe(d,q)coordinatesystemtypicallyinvolve:
[20][23][24]
∙Forwardprojectionfrominstantaneouscurrentsto(a,b,c)complex
currentspacevectorrepresentationofthethree-phase
system.
∙Forwardthree-to-twophase,(a,b,c)-to-(
)projectionusingthe
Clarke
transformation.Vectorcontrolimplementationsusuallyassumeungroundedmotorwithbalancedthree-phasecurrentssuchthatonlytwomotorcurrentphasesneedtobesensed.Also,backwardtwo-to-threephase,(
)-to-(a,b,c)projectionusesspacevectorPWMmodulatororinverseClarketransformationandoneoftheotherPWMmodulators.
∙Forwardandbackwardtwo-to-twophase,(
)-to-(d,q)and(d,q)-to-(
)projectionsusingtheParkandinverseParktransformations,respectively.
However,itisnotuncommonforsourcestousethree-to-two,(a,b,c)-to-(d,q)andinverseprojections.
While(d,q)coordinatesystemrotationcanarbitrarilybesettoanyspeed,therearethreepreferredspeedsorreferenceframes:
[16]
∙Stationaryreferenceframewhere(d,q)coordinatesystemdoesnotrotate;
∙Synchronouslyrotatingreferenceframewhere(d,q)coordinatesystemrotatesatsynchronousspeed;
∙Rotorreferenceframewhere(d,q)coordinatesystemrotatesatrotorspeed.
Decoupled
torqueandfieldcurrentscanthusbederivedfromrawstatorcurrentinputsforcontrolalgorithmdevelopment.[25]
WhereasmagneticfieldandtorquecomponentsinDCmotorscanbeoperatedrelativelysimplybyseparatelycontrollingtherespectivefieldandarmaturecurrents,economicalcontrolofACmotorsinvariablespeedapplicationhasrequireddevelopmentofmicroprocessor-basedcontrols[25]
withallACdrivesnowusingpowerfulDSP(digitalsignalprocessing)technology.[26]
Inverterscanbeimplementedaseither
open-loop
sensorlessorclosed-loopFOC,thekeylimitationofopen-loopoperationbeingmimimumspeedpossibleat100%torque,namely,about0.8
Hzcomparedtostandstillforclosed-loopoperation.[9]
Therearetwovectorcontrolmethods,director
feedback
vectorcontrol(DFOC)andindirectorfeedforward
vectorcontrol(IFOC),IFOCbeingmorecommonlyusedbecauseinclosed-loopmodesuchdrivesmoreeasilyoperatethroughoutthespeedrangefromzerospeedtohigh-speedfield-weakening.[27]
InDFOC,fluxmagnitudeandanglefeedbacksignalsaredirectlycalculatedusingso-calledvoltageorcurrentmodels.InIFOC,fluxspaceanglefeedforwardandfluxmagnitudesignalsfirstmeasurestatorcurrentsand
rotor
speedforthenderivingfluxspaceangleproperbysummingtherotoranglecorrespondingtotherotorspeedandthecalculatedreferencevalueof
slip
anglecorrespondingtotheslipfrequency.[28][29]
Sensorlesscontrol(seeSensorlessFOCBlockDiagram)ofACdrivesisattractiveforcostandreliabilityconsiderations.Sensorlesscontrolrequiresderivationofrotorspeedinformationfrommeasuredstatorvoltageandcurrentsincombinationwithopen-loopestimatorsorclosed-loopobservers.[20][21]
Applicationrecap[edit]
1.Statorphasecurrentsaremeasured,convertedtocomplexspacevectorin(a,b,c)coordinatesystem.
2.Currentvectorisconvertedto(
)coordinatesystem.
Transformedtoacoordinatesystem
rotatingin
referenceframe,rotorpositionbeingderivedby
integrating
thespeedbymeansof
speedmeasurement
sensor.
3.Rotor
fluxlinkage
vectorisestimatedbymultiplyingthestatorcurrentvectorwithmagnetizinginductanceLm
low-passfiltering
theresultwiththerotorno-load
timeconstant
Lr/Rr,namely,therotorinductancetorotorresistanceratio.
4.Currentvectorisconvertedto(d,q)coordinatesystem.
5.d-axiscomponentofthestatorcurrentvectorisusedtocontroltherotorfluxlinkageandtheimaginaryq-axiscomponentisusedtocontrolthemotortorque.WhilePIcontrollerscanbeusedtocontrolthesecurrents,
bang-bang
typecurrentcontrolprovidesbetterdynamicperformance.
6.PIcontrollersprovide(d,q)coordinatevoltagecomponents.Adecouplingtermissometimesaddedtothecontrolleroutputtoimprovecontrolperformancetomitigatecrosscouplingorbigandrapidchangesinspeed,currentandfluxlinkage.PI-controlleralsosometimesneed
attheinp
 升级会员
升级会员 