华中科技大学自动控制理论基本实验Word格式文档下载.docx
《华中科技大学自动控制理论基本实验Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《华中科技大学自动控制理论基本实验Word格式文档下载.docx(45页珍藏版)》请在冰豆网上搜索。
3、函数发生器1台。
【实验步骤】
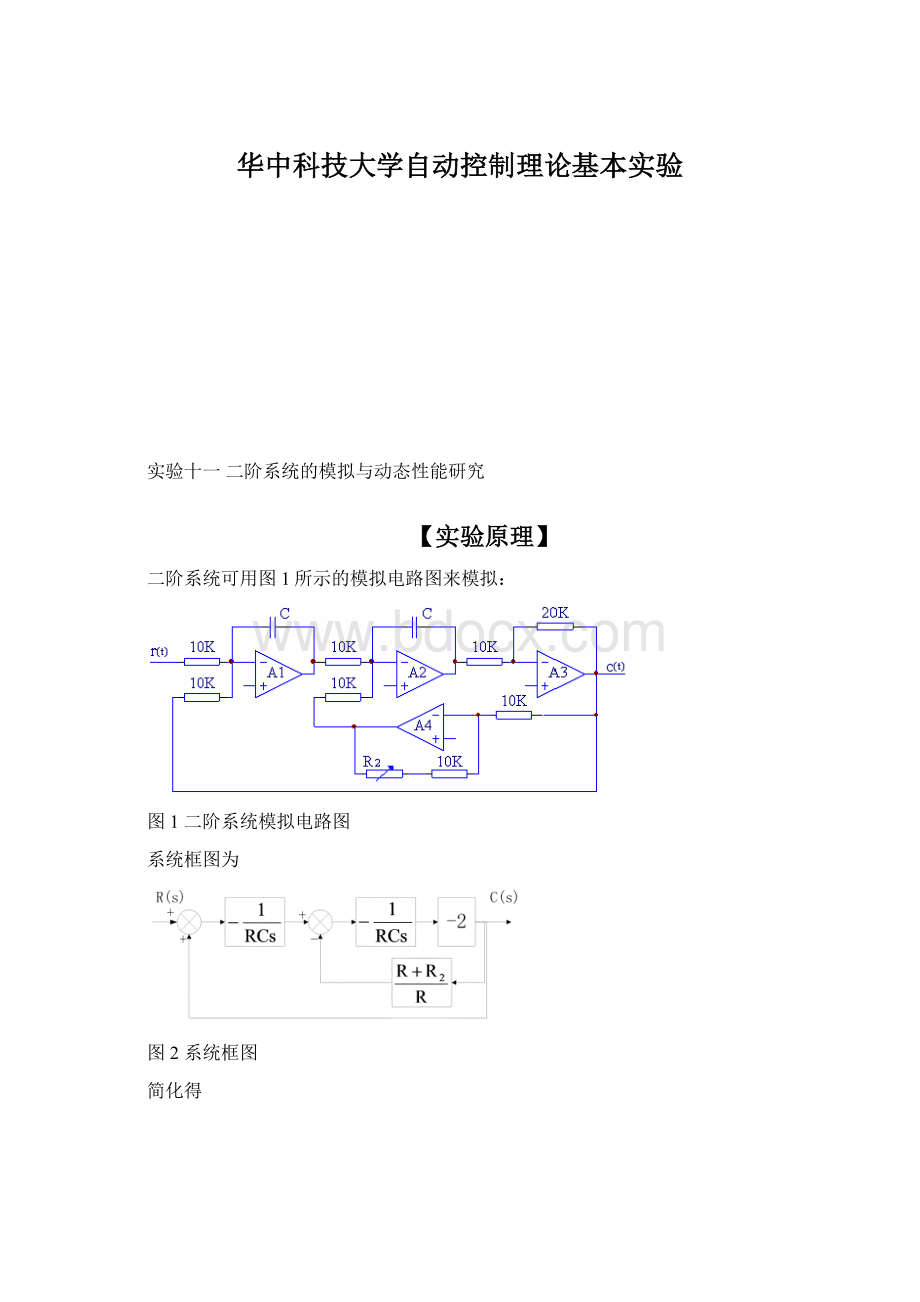
1、根据二阶系统模拟电路图在实验装置上搭建二阶系统的模拟电路
2、分别设置ζ=0;
0<ζ<1;
ζ>1,观察并记录r(t)为正负方波信号时的输出波形C(t)
3、改变运放A1的电容C,再重复以上实验内容
【实验结果分析】
1.1C=0.68μF,ζ=0()
1.2C=0.68μF,0<ζ<1()
1.3C=0.68μF,ζ>1()
1.4C=0.68μF,ζ>1()
2.1C=0.082μF,ζ=0()
2.2C=0.082μF,0<ζ<1()
2.3C=0.082μF,ζ>1()
由上列各图可以看出:
1、阻尼比ζ与超调量和稳定性的关系明显,当ζ=0时,系统等幅震荡;
当0<ζ<1时,系统欠阻尼,存在超调量;
ζ>1时,系统过阻尼,无超调。
2、无阻尼自然震荡频率与响应速度关系明显,阻尼比相同的情况下,无阻尼自然震荡频率越大,系统响应越快。
【实验思考题】
1.根据实验模拟电路图绘出对应的方框图。
消除内环将系统变为一个单位负反馈的典型结构图。
此时能知道系统中的阻尼比ζ体现在哪一部分吗?
如何改变ζ的数值?
方框图如上图所示,阻尼比ζ体现在内环反馈通道的增益,调节内环反馈运放的反馈电阻即可调节阻尼比ζ
2.当线路中的A4运放的反馈电阻分别为8.2k,20k,28k,40k,50k,102k,120k,180k,220k时,计算系统的阻尼比ζ=?
当C1=C2时
R+R2
8.2
20
28
40
50
102
120
180
220
ζ
0.58
1.414
1.98
2.828
3.535
7.211
8.484
12.73
15.55
3.用实验线路如何实现ζ=0?
当把A4运放所形成的内环打开时,系统主通道由二个积分环节和一个比例系数为1的放大器串联而成,主反馈仍为1,此时的ζ=?
将实验中的内环打开时,系统框图为
闭环传递函数的特征方程s的一次项将不存在,所以此时ζ=0
4.如果阶跃输入信号的幅值过大,会在实验中产生什么后果?
由于运放的供电电压为
,若阶跃输入信号幅值过大,可能导致运放工作工程中出现失真,尤其是当内环增益非常大的时候。
实验结果如下
C=0.082μF,,2V
C=0.082μF,,1V
由实验结果,当输入电压幅值较大时,系统已经不稳定
5.在电路模拟系统中,如何实现单位负反馈?
若此时信号与输入信号反向,将输出通过一个与输入相同的电阻引入到输入端即可。
若此时信号与输入信号同相,则需要一个增益为1的反向放大器实现单位负反馈。
6.惯性环节中的时间常数T改变意味着典型二阶系统的什么值发生了改变?
、
各值将如何改变?
T改变意味着闭环极点的实部发生了改变,如果T增大,
将变小,
变大,
变大。
7.典型二阶系统在什么情况下不稳定?
用本实验装置能实现吗?
为什么?
二阶系统在ζ<0时不稳定;
将A4所在支路短接接可以实现(相当于出现了正反馈),此时,系统就有极点在右半平面
8.采用反向输入的运算放大器构成系统时,如何保证闭环系统是负反馈性质?
你能提供一简单的判别方法吗?
采用瞬时极性法;
若最终输出的信号和输入的极性相反,则是负反馈。
一般情况下,若反馈环路中的放大器总个数为奇数,则很有可能是负反馈;
若反馈环路中的放大器总个数为偶数,则很有可能是正反馈
实验十二二阶系统的稳态性能研究
1、三角波的产生电路
实验条件仅提供正负方波信号,由模电知识,对正负方波进行积分可以得到正负三角波。
但是,由于方波的正负对称性不能完全保证,且电容的充放电过程可能存在差异,因此,单纯的积分电路无法实现从正负方波到正负三角波的变化。
对单纯积分电路进行仿真:
由仿真结果可以看到,三角波上叠加了一个渐渐增大的直流电压,直到三角波的峰值接近运放的电源电压,且在峰值部分出现失真。
对此,一个简单的处理办法是在输出之后,接一个RC高通滤波电路。
将输出信号中的直流滤除。
由上图可以看出,输出中的直流已经被滤除,但是输出中三角波部分的峰值因为接近运放电源电压而引起的畸变失真被保留下来,三角波的形状不够完美。
另一种解决积分中直流部分积累的办法就是在电容两端并联一个大电阻,缓慢泻放电容上积累的直流电压。
此时该环节由积分环节变为一个一阶惯性环节。
由仿真结果看,在电容两端,直流电压的积累和泻放达到了平衡,但是其绝对值并不为零。
为此可以考虑将两种方法联合使用,在积分环节中加入电阻泻放直流电压保证波形,在输出端加入RC高通滤波
此时,斜坡函数的波形已经非常完美了。
2、实验使用的系统的分析
为系统建模时,需要考虑各个环节的时间常数,应远小于输入正负方波的周期,只有在响应已经非常近稳定的时候才能将此时的值认为是稳态值。
当r(t)=1(t)、n(t)=0时,单位阶跃响应的误差为:
随开环增益的增大,稳态误差渐渐变小。
当r(t)=0、n(t)=1(t)时,单位阶跃响应的误差为:
当r(t)=0、n(t)=1(t)时,扰动位于开环增益之前的时候,单位阶跃响应的误差为:
随开环增益的增大,稳态误差渐渐增大。
当r(t)=1(t)、n(t)=0,为积分环节时,单位阶跃响应的误差为:
1、进一步通过实验了解稳态误差与系统结构、参数及输入信号的关系:
(1)了解不同典型输入信号对于同一个系统所产生的稳态误差;
(2)了解一个典型输入信号对不同类型系统所产生的稳态误差;
(3)研究系统的开环增益K对稳态误差的影响。
2、了解扰动信号对系统类型和稳态误差的影响。
3、研究减小直至消除稳态误差的措施。
1、面包板、运算放大器、电阻电容等
2、函数信号发生器一台
3、数字示波器一台
4、万用表一支
1、阶跃响应的稳态误差:
(1)当r(t)=1(t)、n(t)=0时,,为惯性环节,为比例环节,观察系统的输出C(t)和稳态误差,并记录开环放大系数K的变化对二阶系统输出和稳态误差的影响。
(2)将改为积分环节,观察并记录二阶系统的稳态误差和变化。
(3)当r(t)=0、n(t)=1(t)时,扰动作用点在f点,,为惯性环节,为比例环节,观察系统的输出C(t)和稳态误差,并记录开环放大系数K的变化对二阶系统输出和稳态误差的影响。
(4)当r(t)=0、n(t)=1(t)时,将扰动点从f点移动到g点,,为惯性环节,为比例环节,观察系统的输出C(t)和稳态误差,并记录开环放大系数K的变化对二阶系统输出和稳态误差的影响。
(5)当r(t)=0、n(t)=1(t)时,扰动作用点在f点时,观察并记录当,分别为积分环节时系统的稳态误差的变化。
(6)当r(t)=1(t)、n(t)=1(t)时,扰动作用点在f点时,分别观察并记录以下情况时系统的稳态误差
a.,为惯性环节;
b.为积分环节,为惯性环节;
c.为惯性环节,为积分环节。
2、斜坡响应的稳态误差
(1)当r(t)=t、n(t)=0时,,为惯性环节,为比例环节,观察系统的输出C(t)和稳态误差。
当r(t)=1(t)、n(t)=0时,,为惯性环节,为比例环节时的阶跃响应
当r(t)=0、n(t)=1(t)时,扰动作用点在f点,,为惯性环节,为比例环节时的阶跃响应
当r(t)=0、n(t)=1(t)时,扰动作用点在g点,,为惯性环节,为比例环节时的阶跃响应
将改为积分环节时的阶跃响应
当r(t)=t、n(t)=0时,,为惯性环节,为比例环节时的斜坡响应
为积分环节时的斜坡响应
由仿真结果可以看到,加入积分环节后,系统的阶跃响应稳态误差为零。
由三角波斜率不同,可以看出,零型系统的斜坡响应稳态误差无限大。
【面包板预实验】
1、三角波波形测试
测试用电路
测试结果
2、稳态响应测试
阶跃响应
(1)
r(t)=1(t)、n(t)=0,,为惯性环节,为比例环节,R=20kΩ
r(t)=1(t)、n(t)=0,,为惯性环节,为比例环节,R=0kΩ
对上面两次实验结果比较可知,开环增益越大,系统对于阶跃输入的稳态误差越小
同时,开环增益会影响到稳态响应中的响应速度和超调量
(2)
r(t)=1(t)、n(t)=0,将改为积分环节
由以上实验结果,一型系统对阶跃输入没有稳态误差
(3)
r(t)=0、n(t)=1(t),扰动作用点在f点,,为惯性环节,为比例环节,
R=20kΩ
R=0kΩ
由以上实验结果,当开环增益在扰动之前的时候,随开环增益的增大,系统对扰动的响应减小。
(4)
r(t)=0、n(t)=1(t),扰动作用点在g点,,为惯性环节,为比例环节,
由以上实验结果,当开环增益在扰动之后的时候,随开环增益的增大,系统对扰动的响应增大。
(5)
r(t)=0、n(t)=1(t),扰动作用点在f点时,为积分环节
由以上实验结果,反馈通道的积分会使系统阶跃响应稳态值为零。
反馈通道含惯性环节的系统,前向通道的积分无法完全消除系统的稳态误差。
(6)
r(t)=1(t)、n(t)=1(t),扰动作用点在f点时,,为惯性环节;
r(t)=1(t)、n(t)=1(t),扰动作用点在f点时,为积分环节,为惯性环节;
r(t)=1(t)、n(t)=1(t),扰动作用点在f点时,为惯性环节,为积分环节;
由以上实验结果,加在输入之后,扰动之前的积分环节可以使系统有较好的稳态特性。
斜坡响应
(1)r(t)=t、n(t)=0,,为惯性环节,为比例环节
(2)r(t)=t、n(t)=0,为积分环节,为惯性环节,为比例环节
(3)r(t)=t、n(t)=0,,为积分环节,为比例环节
由以上实验结果,零型系统斜坡响应的稳态误差无限大,一型和二型系统的斜坡响应稳态误差为有限值。
【实验结果】
2、三角波波形测试
r(t)=1(t)、n(t)=0,,为惯性环节,为比例环节,R=340kΩ
R=330kΩ
(1)r(t)=t、n(t)=0,,为惯性环节,为比例环节
(2)r(t)=t、n(t)=0,为积分环节,为惯性环节,为比例环节
(3)r(t)=t、n(t)=0,,为积分环节,为比例环节
1、系统开环放大系数K的变化对其动态性能(、、)的影响是什么?
对其稳态性能()的影响是什么?
从中可得到什么结论?
由开环增益在传递函数表达式中的位置,K的增大会使得增大、不变、减小,稳态性能减小,所以要改变稳态性能可以增大开环放大系数K,但同时得考虑K对动态性能的影响。
2、对于单位负反馈系统,当时,如何使用双线示波器观察系统的稳态误差?
对于图12-3所示的实验线路,如果将系统的输入r(t)送入示波器的y1通道,输出c(t)送入示波器的y2通道,且y1和y2增益档放在相同的位置,则在示波器的屏幕上可观察到如图12-4所示的波形,这时你如何确认系统的稳态误差?
使用双通道示波器中的MATHMENU功能可以对两个通道的信号做差,此时即为稳态误差
如图所示的波形中,y2通道的波形尚未稳定,无法准确判断其稳态值,只能粗略估计,调出示波器的光标,使它们都为幅度,将一光标与y1重合,另一光标与y2幅值的末端重合,读出光标之差就是稳态误差。
3、当r(t)=0时,实验线路中扰动引起的误差应如何观察?
当输入为零时,输出的稳态值即为稳态误差。
5、当r(t)=1(t)、f(t)=1(t)时,试计算以下三种情况下的稳态误差
5、试求下列二种情况下输出C(t)与比例环节K的关系。
当K增加时C(t)应如何变化?
(a)
当K增加时C(t)减小
(b)
当K增加时C(t)增大
6、为什么0型系统不能跟踪斜坡输入信号?
零型系统没有积分环节,闭环传递函数中,分母上没有s,对于斜坡响应,分母上有一个s无法被约掉,随着时间的增长,误差越来越大,无法跟踪斜坡输入。
7、为什么0型系统在阶跃信号输入时一定有误差存在?
对于0型系统,其节约响应的稳态误差表达式为,受实际器件的影响,开环增益K的值不可能无限大,因此误差毕然存在。
8、为使系统的稳态误差减小,系统的开环增益应取大些还是小些?
因为开环增益的表达式出现在稳态误差表达式的分母上,当开环增益增大的时候,稳态误差减小。
9、本实验与实验一结果比较可知,系统的动态性能和稳态精度对开环增益K的要求是相矛盾的。
矛盾的关键在哪里?
在控制工程中如何解决这对矛盾?
开环增益出现在特征方程的常数项中,对无阻尼自然震荡频率和阻尼比都有影响。
矛盾的关键在于要减小系统的稳态误差就必须增大开环增益,而增大开环增益就会使得系统振荡,超调量加大;
控制工程中常常做折中处理,即在允许超调量的前提下,尽量增大开环增益或者在不引起系统振荡的情况下增加系统的型别。
实验十四线性控制系统的设计与校正
二阶系统方框图如图所示
要求串联校正后系统的调节时间不超过0.1s,超调量不超过5%。
由系统框图,得
模拟电路图为:
若要串联校正后系统的调节时间不超过0.1s,超调量不超过5%。
串联校正环节为
串联校正后系统为
解得:
引入串联校正后的系统框图为
系统框图可简化为
系统阶跃响应不存在稳态误差。
串联校正环节模拟电路图为:
,
引入串联校正后的系统模拟电路图为:
总结:
该方法的策略是通过添加一个与原系统极点位置相同零点和一个新的极点重新配置系统开环极点的位置,并未增加系统阶数,也未改变开环bode增益。
虽然,串联的校正环节零点在极点前面,但是,该校正与传统的相位超前校正还是有所差异的。
从出发点上讲,该方法并未严格设定目标增益穿越频率,仍按照开环极点配置的方式来考虑系统校正环节的参数,因此,无需考虑最大相位超前频率,只需考虑新的开环非零极点位置。
原系统的阶跃响应:
系统Bode图
校正后系统的阶跃响应:
图中可以看出,校正后的系统调节时间和超调量都满足要求。
系统设计符合要求。
1、试验箱、面包板、运算放大器、电阻电容等
1、按照系统模拟电路图搭建原系统的模型
2、运放电压为±
15V,输入正负方波的幅值为0.5V,频率为1Hz,测量输入和输出波形,观察输出对输入的跟踪情况,以及系统的阶跃响应。
3、按照系统模拟电路图搭建控制器的模型,串联到原系统中。
4、同样的输入下测量输出波形,并与校正前的系统比较,看是否满足题目要求,是否与仿真结果相同。
5、如果与仿真结果有差异,分析差异产生的原因,并作出调整。
【注意事项】
1、该实验为线性系统的校正,因此一定要让系统各个部分工作在线性状态,根据之前基本实验的经验,如果输出波形与仿真结果不同,可能是因为输入的幅值较大,导致系统中某一部分的幅值因接近运放正负电源电压而引起非线性失真,此时可以降低输入的幅值。
2、试验中某些值的电阻在E96阻值序列中没有,或在实验室提供的试验箱中没有,与32kΩ相近的为33kΩ,与16kΩ相近的为15.7kΩ(10kΩ、4.7kΩ与1kΩ串联),12kΩ为10kΩ与2kΩ串联。
同时应注意,阻值的改变是否影响了系统的特性。
本实验中,经仿真测试,阻值的微小变化并未显著影响系统响应。
3、串联的校正环节作为控制器应该加在被控对象之前。
设计系统校正时不但要考虑系统整体的传递函数,还要考虑每一部分的含义。
实验电路:
校正后系统的阶跃响应部分细节:
由实验阶跃响应波形,超调量约为2%,调节时间约为75ms,满足设计要求。
1、加入超前校正装置后,为什么系统的瞬态响应会变快?
因为加入超前校正装置后,系统的高频段响应幅值变大,截止频率增大,从而系统的带宽也增大,所以系统的响应速度加快。
2、什么是超前校正装置和滞后校正装置,它们各利用校正装置的什么特性对系统进行校正?
利用控制器的相角超前特性,将校正装置串联在系统的前向通道以改变系统的相频特性的校正装置即为超前校正装置;
利用控制器的低通滤波特性,使已校正的系统频率下降,进而使系统获得足够的相角裕度,这样的装置叫滞后校正装置。
3、实验时所获得的性能指标为何与设计时确定的性能指标有偏差?
由于实验电路本身具有一定得非线性,以及在电路设计时都将各个环节考虑成理想的而忽略掉负载效应,再加上环境噪声的影响,使得实验的性能指标和设计的有所偏差。
同时,实验所使用的器材如电阻阻值的误差,放大器对信号的畸变等也会影响系统的性能指标。
实验十六控制系统极点的任意配置
使用状态空间知识为该系统合理配置极点。
要求极点配置后系统的响应时间是原系统的,且为临界阻尼。
检查能控性
所以系统完全能控,即具备极点任意配置的条件。
可知,原系统中
若要极点配置后系统的响应时间是原系统的,且为临界阻尼则
希望的闭环特征多项式为:
引入状态反馈后系统的特征方程式为
引入状态反馈后的方框图为
系统存在稳态误差,需要在通过一个增益进行补偿,可以通过反馈环路外的反相放大器来实现,这样就不会改系统的性能。
图中可以看出,两个系统响应时间确实为五倍关系,且校正后的系统没有超调量,为临界阻尼。
2、EE1643C函数信号发生器一台
3、TDS1002B数字示波器一台
3、按照系统模拟电路图搭建控制器的模型,加入到原系统中。
1、根据之前基本实验的经验,如果输出波形与仿真结果不同,可能是因为输入的幅值较大,导致系统中某一部分的幅值因接近运放正负电源电压而引起非线性失真,此时可以降低输入的幅值。
2、如果实验发现输出结果在0.5s内并没有稳定,则需要检查系统是否出现失真或其他原因引起的失真,如果系统工作正常,则需降低输入正负方波的频率。
原系统模拟电路
原系统的阶跃响应波形
系统阶跃响应的的调节时间约为200ms,超调量约为15%
加入校正器,极点配置后的系统模拟电路
极点配置后系统的阶跃响应波形
系统阶跃响应的的调节时间约为40ms,无超调量
实际测试波形与理论值符合,并满足题目要求。
原系统的阶跃响应波形:
系统阶跃响应的的调节时间约为250ms,超调量约为15%
极点配置后系统的阶跃响应波形部分细节
系统阶跃响应的的调节时间约为50ms,无超调量
1、系统极点能任意配置的充要条件为什么是状态可控?
系统状态可控,即输入可以影响系统状态,只有输入可以影响系统状态,反馈到输入的状态反馈才能影响系统的状态。
2、为什么引入状态反馈后的系统,其性能一定会优于输出反馈的系统?
 升级会员
升级会员 