步进电机工作原理及控制电路资料下载.pdf
《步进电机工作原理及控制电路资料下载.pdf》由会员分享,可在线阅读,更多相关《步进电机工作原理及控制电路资料下载.pdf(11页珍藏版)》请在冰豆网上搜索。
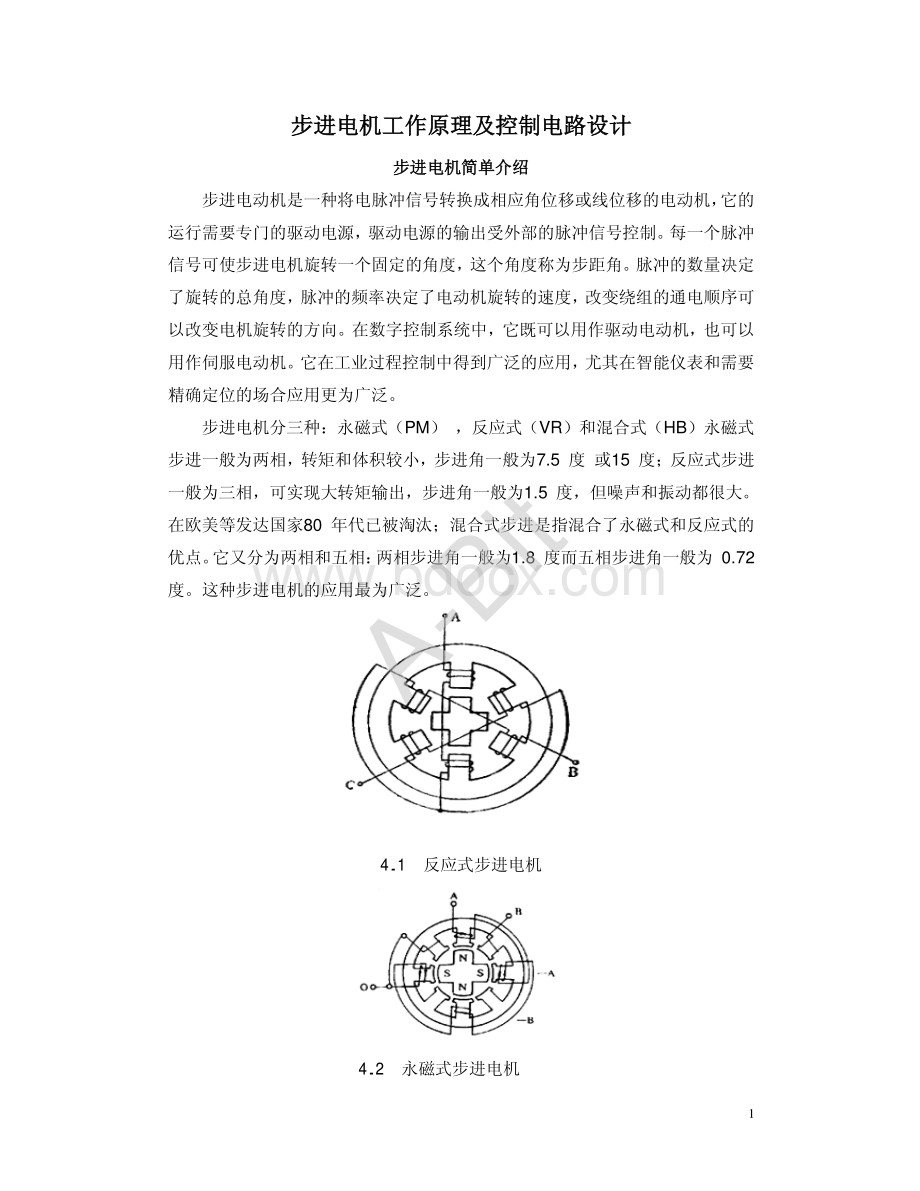
两相步进角一般为1.8度而五相步进角一般为0.72度。
这种步进电机的应用最为广泛。
4.1反应式步进电机4.2永磁式步进电机A-Bit24.3混合式步进电机步进电机的工作原理步进电机的工作原理步进电机是机电一体化的关键部件之一,被广泛应用于需要精确定位、同步、行程控制等场合。
一、步进电动机有三线式、五线式、六线式三种,但其控制方式均相同,必须以脉冲电流来驱动。
若每旋转一圈以200个励磁信号来计算,则每个励磁信号前进1.8度,其旋转角度与脉冲数成正比,正、反转可由脉冲顺序来控制。
二、步进电动机的励磁方式可分为全部励磁及半步励磁,其中全步励磁又有1相励磁及2相励磁之分,而半步励磁又称1-2相励磁。
图为步进电动机的控制等效电路,适应控制A、B、/A、/B的励磁信号,即可控制步进电动机的转动。
每输出一个脉冲信号,步进电动机只走一步。
因此,依序不断送出脉冲信号,即可步进电动机连续转动。
分述如下:
A、1相励磁法:
在每一瞬间只有一个线圈导通。
消耗电力小,精确度良好,但转矩小,振动较大,每送一个励磁信号可走1.8度。
若欲以1相励磁法控制步进电动机正转,其励磁顺序如图所示。
若励磁信号反向传送,则步进电动机反转。
表4.11相励磁法A-Bit3B、2相励磁法:
在每一瞬间会有二个线圈同时导通。
因其转矩大,振动小,故为目前用最多的励磁方式,每送一励磁信号可走1.8度。
若以2相励磁法控制步进电动机正转,其励磁顺序如图所示。
表4.22相励磁法C、1-2相励磁法:
为1相与2相轮流交替导通。
因分辨率提高,且运转平滑,每送一励磁信号可走0.9度,故亦广泛被采用。
若以1相励磁法控制步进电动机正转,其励磁顺序如图所示。
励磁顺序:
AABBBCCCDDDAA表4.31-2相励磁法步进电动机的负载转矩与速度成反比,速度愈快负载转矩愈小,当速度快至其极限时,步进电动机即不再运转。
所以在每走一步后,程序必须延时一段时间。
下面介绍的是国产20BY-0型步进电机,它使用+5V直流电源,步距角为18度。
电机线圈由四相组成,即A、B、C、D四相,驱动方式为二相激磁方式,电机示意图和各线圈通电顺序如图4.2和表4.1所示:
A-Bit4图4.4步进电机原理图表4.1线圈通电顺序相顺序从0到1称为一步,电机轴将转过18度,01234则称为通电一周,转轴将转过72度,若循环进行这种通电一周的操作,电机便连续的转动起来,而进行相反的通电顺序如4321将使电机同速反转。
通电一周的周期越短,即驱动频率越高,则电机转速越快,但步进电机的转速也不可能太快,因为它每走一步需要一定的时间,若信号频率过高,可能导致电机失步,甚至只在原步颤动。
步进电机的步距角与工作拍数步进电机的步距角与工作拍数对于一个步进电机,如果它的转子的齿数为Nr,它的齿距角z为:
z=2/Nr,而步进电机运行k拍可使转子转动一个齿距位置。
实际上步进电机每一拍就执行一次步进,所以步进电机的步距角s可以表示如下:
2/sNrk=公式(4.1)或360/sNrk=o公式(4.2)其中:
k是步进电机工作拍数,Nr是转子的齿数。
A-Bit5例如:
对于三相反应式步进电机而言,工作方式有三拍和六拍之分。
三拍就是在转动一个齿距时换相三次;
六拍则是换相六次。
而在三拍方式中还有单三拍和双三拍之分。
从公式(4.2)可知:
为了使步进电机工作的步距角s减小,也即:
使控制精度增高,步进电机在相数一定的情况下应增加工作拍数。
步进电机的频率特性步进电机的频率特性对于反应式步进电机,在其绕组中通电的相序不同时,步进电机的旋转方向和步进精度有所不同。
步进电机对绕组的通电频率有一定的要求。
如果通电频率过高,超过步进电机的最大步进速度,就会产生失步。
一般步进电机的通电频率,即起动频率为50步秒到2000步秒。
步进电机的频率特性曲线,是步进电机的工作频率及其对应转动力矩所作出的曲线。
步进电机的频率特性曲线和很多因素有关,这些因素包括步进电机的转子直径、转子铁心有效长、.控制线路的电压、齿数、齿形、齿槽比、步进电机内部的磁路、绕组的绕线方式、定转子间的气隙、转动一个齿距所需的拍数等。
在使用中会影响到步进电机频率特性而又能由用户确定的因素有:
控制拍数、控制线路的电压、线路时间常数等。
下面分析这几种因素对步进电机频率特性的影响。
(1).工作方式对频率特性的影响在步进电机应用中,它的工作方式是以一个齿距所用的拍数来表示的。
拍数本质上也就是转动一个齿距所需的电源电压换相次数,值得指出的是换相是指对步进电机各相绕组进行转换,而电源电压是单极性的固定的。
一般而言反应式电机拍数越多矩频特性就越好。
因此设计中应选择多拍的控制方式。
(2).线路时间常数对频率特性的影响步进电机的每相绕组供电都是通过功率开关电路进行的。
步进电机一相绕组的开关电路如图3.2所示。
其中L为步进电机绕组电感;
RL为绕组电阻;
Rc为晶体管T的集电极电阻;
D是续流二极管,它为绕组放电提供回路;
晶体管T是大功率开关管。
Rc也是个外接的功率电阻,它是一个消耗性负载,一一般为数欧姆。
这时线路的时间常数Tj为:
()/LCTjLRR=+公式(4.3)其中:
L单位为亨,Rc、RL单位为欧姆,Tj单位为秒。
A-Bit6图4.5步进电机一线绕组的开关回路开关回路时间常数Tj对注入电机绕组的电流达到稳定值的时间有极大关系,它影响到步进电机的工作频率。
并且有:
Tj越小,电流达稳定时间小,相应电机工作频率高;
反之,Tj越大,电流达稳定时间长,电机工作频率低。
从式(4.3)可知:
要减少Tj,可以采用增大Rc的办法。
但是,增大Rc时,又会使稳态电流值减小,从而影响电机的力矩。
为了减少Tj,而不使稳态电流减小,可采用在增大Rc的同时,也提高供电电压的办法。
在高频应用中,要尽量减小以改善步进的特性,所以常在开关回路中采用较大的Rc,同时也提高回路的电源电压U。
但这样也会使效率降低,在低频段工作时也会使步进电机的振荡加剧。
在实际中,可根据客观情况来考察选择恰当的外部电阻Rc,使步进电机处于合适的工作频率状态。
(3)开关回路电压对频率的影响在一般应用中,开关电路的脉宽和流人绕组的电流的最大值,必定会随开关电路换相频率的提高而相应减小。
开关电路产生的控制电压是以矩形波方式加在绕组上的。
随着换相频率的提高,矩形脉冲电压波频率相应提高,这样,矩形脉冲电压的宽度和周期也就会变小,当矩形脉冲电压窄到一定程度,流入电机绕组的电流就无法达到稳定值I,步进电机就难以步进工作了。
为了保证在矩形脉冲电压相当窄时,也即频率足够高时,步进电机仍能正常步进工作,可以提高开关回路的电压。
开关回路加到绕组的是矩形脉冲电压,故电流也是脉冲。
在步进电机中要设A-Bit7法增大起动电流,以提高步进电机转动力矩,即提高其工作频率。
由于步进电机是感性负载,所以进入绕组的电流脉冲是以指数形式上升,即这时电流脉冲i为:
1/
(1)TjHiIe=公式(4.4)其中:
i是电流脉冲瞬时值;
HI是在开关回路电压为u时的电流稳态值;
Tj是开关回路的时间常数,()/LCTjLRR=+步进电机的控制步进电机的控制
(1).步进电机的正反转控制在步进电机转动的过程中改变绕组的励磁顺序可改变转动方向.
(2).步进电机控制系统框图一般一个完整的步进电机控制系统包括控制器,驱动器,电机三部分.其框图如下图所示.4.6.步进电机控制系统框图(3).步进电机的现场应用驱动电路综合系统使用的是小型步进电机,对电压和电流要求不是很高,为了说明应用原理,故采用最简单的驱动电路,目的在于验证步进电机的使用,在正式工业控制中还需在此基础上改进。
一般的驱动电路可以用下图所示的形式。
图4.7一般的驱动电路控制器驱动器步进电机A-Bit8在实际应用中一般驱动路数不止一路,用上图的分立电路体积大,很多场合用现成的集成电路作为多路驱动。
常用的小型步进电机驱动电路可以用ULN2003或ULN2803。
ULN2003是高压大电流达林顿晶体管阵列系列产品,具有电流增益高、工作电压高、温度范围宽、带负载能力强等特点,适应于各类低速小功率驱动的系统。
ULN2003由8组达林顿晶体管阵列和相应的电阻网络以及钳位二极管网络构成,具有同时驱动8组负载的能力,为单片双极型大功率高速集成电路。
ULN2003内部结构及等效电路图如下图所示:
图4.8图4.9ULN2003内部结构等效电路图A-Bit9程序设计程序设计步进电机控制系统程序主要完成对步进电机的运动及其状态的液晶显示的控制,通过调用键盘扫描发现键盘输入命令后单片机通过程序发送相应指令使步进电机正转或反转并将步进电机相应的状态显示在液晶显示器上。
A-Bit10图5.1步进电机控制流程图开始初始化各项初始化液晶显示显示执行键盘扫描Flag=1Flag=3执行正转程序执行反转程序NoYesFlag=4NoYesFlag=2停止转动Flag=0YesNoYesYes停止转动A-Bit11步进电机控制及液晶显示主程序如下所示:
voidmain()flag=0;
/按键标志变量flag1=0;
/步进数标志变量init();
/液晶初始化子程序while
(1)keyscan();
/键盘扫描子程序if(flag=1)zz();
/正转子程序elseif(flag=3)fz();
/反转子程序writebjs(8,count);
/显示步进数A-Bit
 升级会员
升级会员 