模型参考自适应控制Word文件下载.docx
《模型参考自适应控制Word文件下载.docx》由会员分享,可在线阅读,更多相关《模型参考自适应控制Word文件下载.docx(18页珍藏版)》请在冰豆网上搜索。
系统设计举例
以下通过一个设计举例说明参数最优化设计方法的具体应用。
例10.1设一受控系统的开环传递函数为Wa(s)=
,其中K可变,要求用一参考模型自适应控制使系统得到较好的输出。
解:
对于该系统,我们选其控制器为PID控制器,而PID控制器的参数由自适应机构来调节,参考模型选性能综合指标良好的一个二阶系统:
Wm(d)=
自适应津决定的评价函数取
minJ=
e2(t)dt,e(t)为参考模型输出与对象输出的误差。
由于评价函数不能写成PID参数的解析函数形式,因此选用单纯形法做为寻优方法。
(参见有关优化设计参考文献)。
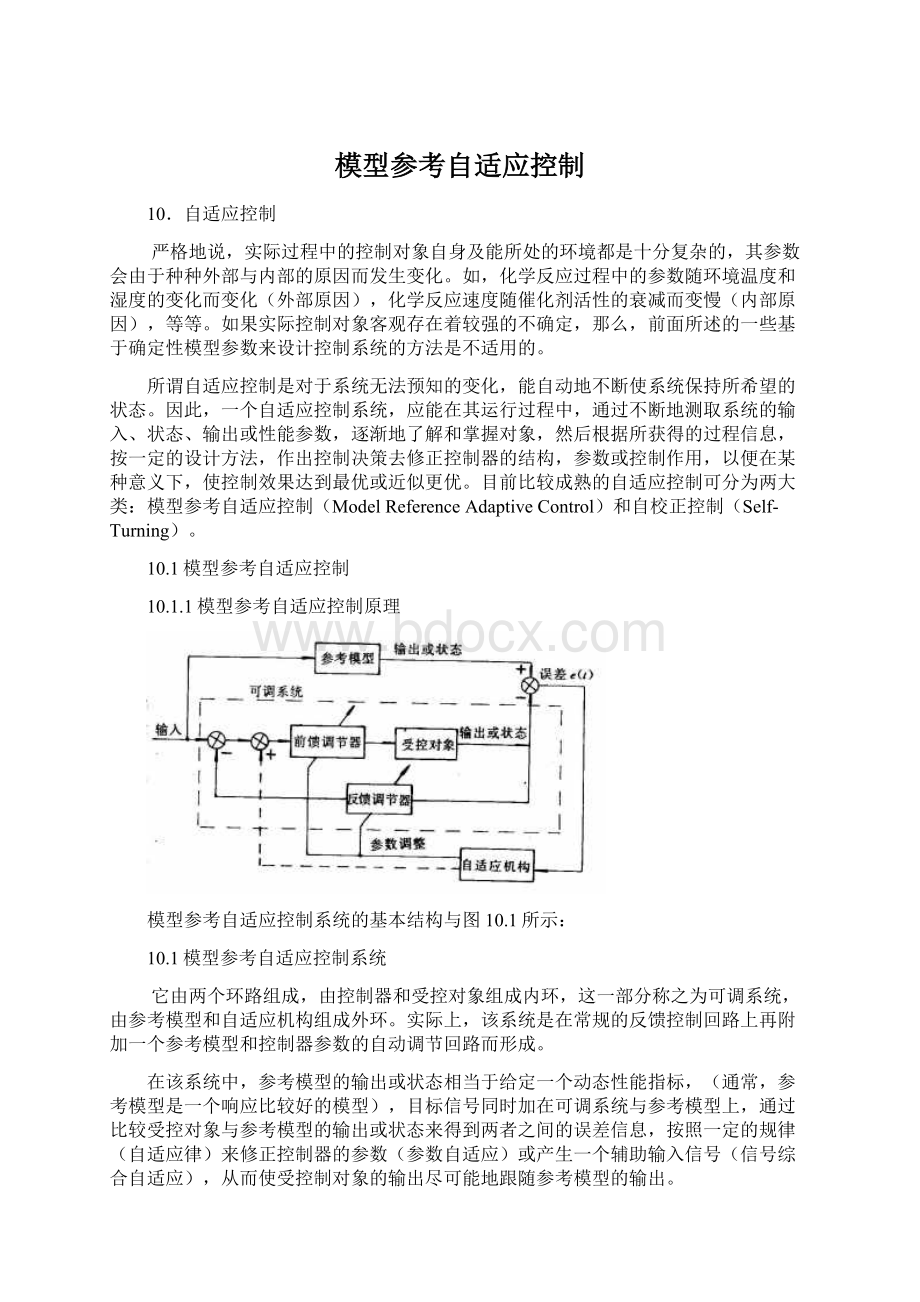
在上述分析及考虑下,可将系统表示具体结构表示如下图10.2所示。
r(t)x0x1x2
1/s1/s
--
1.414
x7
x5x3x4x6
PID1/s
单纯形法寻优
图10.2系统仿真结构图
为了进行数字仿真(连续系统离散相似法),图中的模型是采用典型环节(积分环节,惯性环节)型式表示。
对于图5-17所示系统,可写出各类环节的差数方程,其中,PID控制器的差分方程为:
式中,Kp为比例系数,TI为积分时间常数,Td为微分时间常数,它们是自适应津的调整参数,也是单纯形法的寻优参数。
T是采样周期。
用MATLAB编写的仿真程序如下,(chp10-1.m和suba.m),程序中有关离散相似法仿真及单纯形法寻优的原理请参见有关参考书,如参考文献[]。
globalRI9L1L2L3xp1p2p3
globalKpE1F1G1E5F5G5m
globalK1T4T5
x=zeros(3,7);
Q=zeros(1,7);
p1=zeros(1000,1);
k=zeros(3,1);
N=3;
E=0.001;
R=1;
L=0.012;
p2=zeros(1000,1);
p3=zeros(1000,1);
L1=0.05;
L2=5;
L3=200;
m=0;
mn=0;
Kp1=zeros(100,1);
Ti=zeros(100,1);
Td=zeros(100,1);
Kp=2;
E1=1;
F1=L1;
G1=L1*L1/2;
E5=exp(-L1);
F5=Kp*(1-E5);
G5=Kp*(E5-1)+Kp*L1;
I9=0;
x(1,1)=1;
x(2,1)=0.5;
x(3,1)=0.9;
forj=2:
N+1
fori=1:
N
ifi==j-1
x(i,j)=x(i,1)+L;
else
x(i,j)=x(i,1);
end
end
forj=1:
Q(j)=suba(j);
Ex=0;
whileEx<
1
Q0=0;
forj=1:
ifQ(j)>
Q0
Q0=Q(j);
j0=j;
Q1=0;
ifj~=j0
Q1
Q1=Q(j);
j1=j;
Q2=Q0;
ifQ(j)<
Q2
Q2=Q(j);
j2=j;
mn=mn+1;
Kp1(mn,1)=x(1,j2);
Ti(mn,1)=x(2,j2);
Td(mn,1)=x(3,j2);
ifQ2<
if(Q0-Q2)<
E
Ex=1;
(E*Q2)
x(i,N+2)=0;
x(i,N+2)=x(i,N+2)+x(i,j);
x(i,N+2)=2*(x(i,N+2)-x(i,j0))/N-x(i,j0);
j=N+2;
Q(N+2)=suba(j);
ifQ(N+2)<
Q(j1)
if(1.5*Q(N+2)-0.5*Q0)<
Q2;
x(i,N+4)=1.5*x(i,N+2)-0.5*x(i,j0);
j=N+4;
Q(N+4)=suba(j);
ifQ(N+4)<
Q(N+2);
x(i,N+3)=x(i,N+4);
Q(N+3)=Q(N+4);
x(i,N+3)=x(i,N+2);
Q(N+3)=Q(N+2)
Q(N+3)=Q(N+2);
x(i,j0)=x(i,N+3);
Q(j0)=Q(N+3);
ifQ(N+2)>
Q(j0)
x(i,N+2)=x(i,j0);
x(i,N+3)=0.3*x(i,j0)+0.7*x(i,N+2);
j=N+3;
Q(N+3)=suba(j);
ifQ(N+3)<
x(i,j)=(x(i,j)+x(i,j2))/2;
I9=1;
j=j2;
Fin=suba(j)
x(1,j2),x(2,j2),x(3,j2)
figure
(1)
m1=1:
1:
m;
m1=m1'
;
p1=p1(1:
m,1);
p2=p2(1:
p3=p3(1:
plot(m1,p1,'
r'
m1,p2,'
B'
m1,p3,'
g'
)
grid
pause
figure
(2)
m2=1:
mn;
m2=m2'
Kp1=Kp1(1:
mn,1);
Ti=Ti(1:
Td=Td(1:
plot(m2,Kp1,'
m2,Ti,'
m2,Td,'
functionresulta=suba(j)
K1=x(1,j);
T4=x(2,j);
T5=x(3,j);
x1=0;
x2=0;
x3=0;
x4=0;
x6=0;
w1=0;
w2=0;
w4=0;
w5=0;
u5=0;
t=0;
F=0;
T6=L1*L2;
fori1=1:
L3
x5=R-x6;
x3=x3+K1*(x5-w5+T6*x5/T4+T5*(x5-2*w5+u5)/T6);
u5=w5;
w5=x5;
fori2=1:
L2
x0=R-1.414*x1-x2;
u2=x1;
u4=x4;
v1=(x0-w1)/L1;
x1=E1*x1+F1*x0+G1*v1;
w1=x0;
v2=(u2-w2)/L1;
x2=E1*x2+F1*u2+G1*v2;
w2=u2;
v3=(u4-w4)/L1;
x4=E1*x4+F1*x3;
x6=E5*x6+F5*u4+G5*v3;
w4=u4;
x7=x2-x6;
t=t+L1;
F=F+x7*x7*L1;
ifI9==1
m=m+1;
p1(m,1)=x2;
p2(m,1)=x6;
p3(m,1)=x7;
end
resulta=F;
程序运行后,绘制出受控对象和参考模型的输出及两者间的误差曲线如图10.3,控制器的三个参数(Kp,TI,Td)的变化曲线如图10.4所示,图中可以看到,经过一段时间的调整(kd,TI,Td自动调整)后,受控对象输出能很好地接近参考模型的输出。
图10.3受控对象和参考模型的输出图10.4Kp,TI,Td的变化曲线
及两者间的误差曲线
读者可以改变系统的某些参数(如让程序中的ka=1或ka=3等)后再运行程序观看仿真结果。
10.2自校正控制
自校正控制技术特别适宜用于结构已知而参数未知但恒定或缓慢变化的随机系统。
由于大多数工业对象正好具有这种特征,因此,自校正控制技术在工业控制过程中得到了广泛的应用。
10.2.1自校正控制系统的基本结构
图10.5自校正控制系统的典型结构
与模型参考自适应控制系统一样,自校正控制系统也由两个环路组成,典型结构如图10.5所示。
内
 升级会员
升级会员 