广东工业大学现代控制理论实验报告Word文件下载.docx
《广东工业大学现代控制理论实验报告Word文件下载.docx》由会员分享,可在线阅读,更多相关《广东工业大学现代控制理论实验报告Word文件下载.docx(15页珍藏版)》请在冰豆网上搜索。
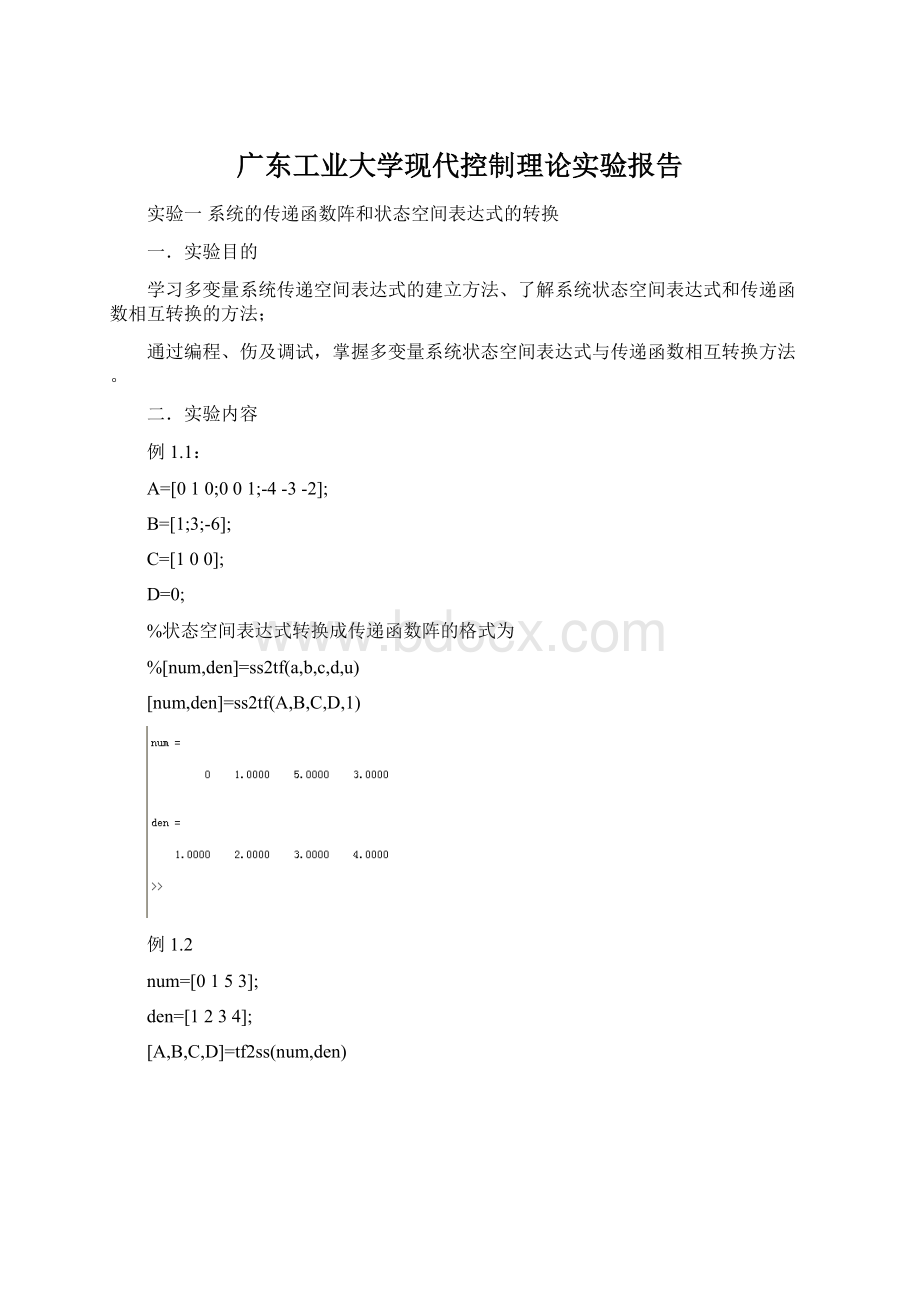
例1.2
num=[0153];
den=[1234];
[A,B,C,D]=tf2ss(num,den)
练习题
求A、B、C、D阵的程序和运行结果
程序如下:
%传递函数阵的格式转换成为状态空间表达式
num=[0012;
0153];
验证:
程序如下:
A=[-2-3-4;
100;
010];
0;
0];
C=[012;
153];
D=[0;
实验二状态空间控制模型系统仿真及状态方程求解
1.熟悉线性连续系统的状态空间控制模型的各种表示方法;
2.熟悉系统模型的转换功能;
3.利用MATLAB对线性定常系统进行动态分析。
例2.1
num=[1213];
den=[10.521];
[z,p,k]=tf2zp(num,den)
[a,b,c,d]=tf2ss(num,den)
例2-2
A=[01;
-10-5];
B=[0;
D=B;
C=[10;
01];
x0=[2;
1];
[y,x,t]=initial(A,B,C,D,x0);
plot(t,x(:
1),t,x(:
2))
grid
title('
ResponsetoInitialCondition'
)
xlable('
Time(sec)'
ylable('
x1,x2'
text(0.55,1.15,'
x1'
text(0.4,-2.9,'
x2'
例2-3
A=[-1-1;
6.50];
B=[11;
10];
D=[00;
00];
step(A,B,C,D)
A=[0-2;
1-3];
B=[2;
C=[10];
x0=[1;
初始状态x0=[1;
2]时的阶跃输入响应:
C=[1,0;
D=zeros(1,1);
2];
t=[0:
.04:
15];
u=heaviside(t);
G=ss(A,B,C,D);
G1=tf(G);
[y1,t,x1]=initial(G,x0,t);
[y2,t,x2]=lsim(G,u,t);
y=y1+y2;
x=x1+x2;
plot(t,x);
gridon
实验三系统能控性、能观性的判别
1.系统的能控性和能观测性的判别方法、系统的能观性和能观测性分解;
2.了解MATLAB中相应的函数。
例3-
(1)判别系统能控性:
%判断系统状态的能控性
-2-3];
Qc=ctrb(A,B);
n=rank(Qc);
L=length(A);
ifn==L
disp('
系统状态完全能控'
)
else
系统状态不完全能控'
end
例3-
(2)能控性分解后的模型:
C=[34];
[Ax,Bx,Cx,T,K]=ctrbf(A,B,C)
sum(K)
练习题
(1)
A=[00-1;
10-3;
01-3];
C=[01-2];
Qo=obsv(A,C);
n=rank(Qo);
系统状态完全能观'
系统状态不完全能观'
1;
3-
(2)能观性分解:
[Ax,Bx,Cx,T,K]=obsvf(A,B,C)
实验四系统稳定性仿真实验
1.掌握线性系统稳定性的判别方法;
2.了解MATLAB中相应的函数
例题4-1:
-1-1];
%Q=eye(size(A,1));
Q=eye(2,2);
P=lyap(A,Q);
flag=0;
n=length(A);
fori=1:
n
det(P(1:
i,1:
i))
if(det(P(1:
i))<
=0)
flag=1;
end
end
ifflag==1
SystemisLypunovstable'
);
else
SystemisnotLypunovstable'
A=[-3-8-2-4;
1000;
0100;
0010];
Q=eye(4,4);
实验五状态反馈及状态观测器的设计
1.熟悉状态反馈矩阵的方法;
2.熟悉状态观测器设计方法。
习题:
1.程序如下A=[-10-35-50-24;
0100;
C=[1,7,24,24];
P=[-30,-1.2,-2.4+4i,-2.4-4i];
K=acker(A,B,P)
A-B*K
响应曲线:
A=[-36-207.52-851.712-783.36;
C=[172424];
D=0
2.程序如下:
A=[0,1,0;
980,0,-2.8;
0,0,-100];
100];
C=[1,0,0];
P=[-100,-102,-103];
A1=A'
;
B1=C'
C1=B'
K=acker(A1,B1,P);
E=(K)'
aEc=A-E*C
 升级会员
升级会员 