前馈及复合控制Word文档下载推荐.doc
《前馈及复合控制Word文档下载推荐.doc》由会员分享,可在线阅读,更多相关《前馈及复合控制Word文档下载推荐.doc(10页珍藏版)》请在冰豆网上搜索。
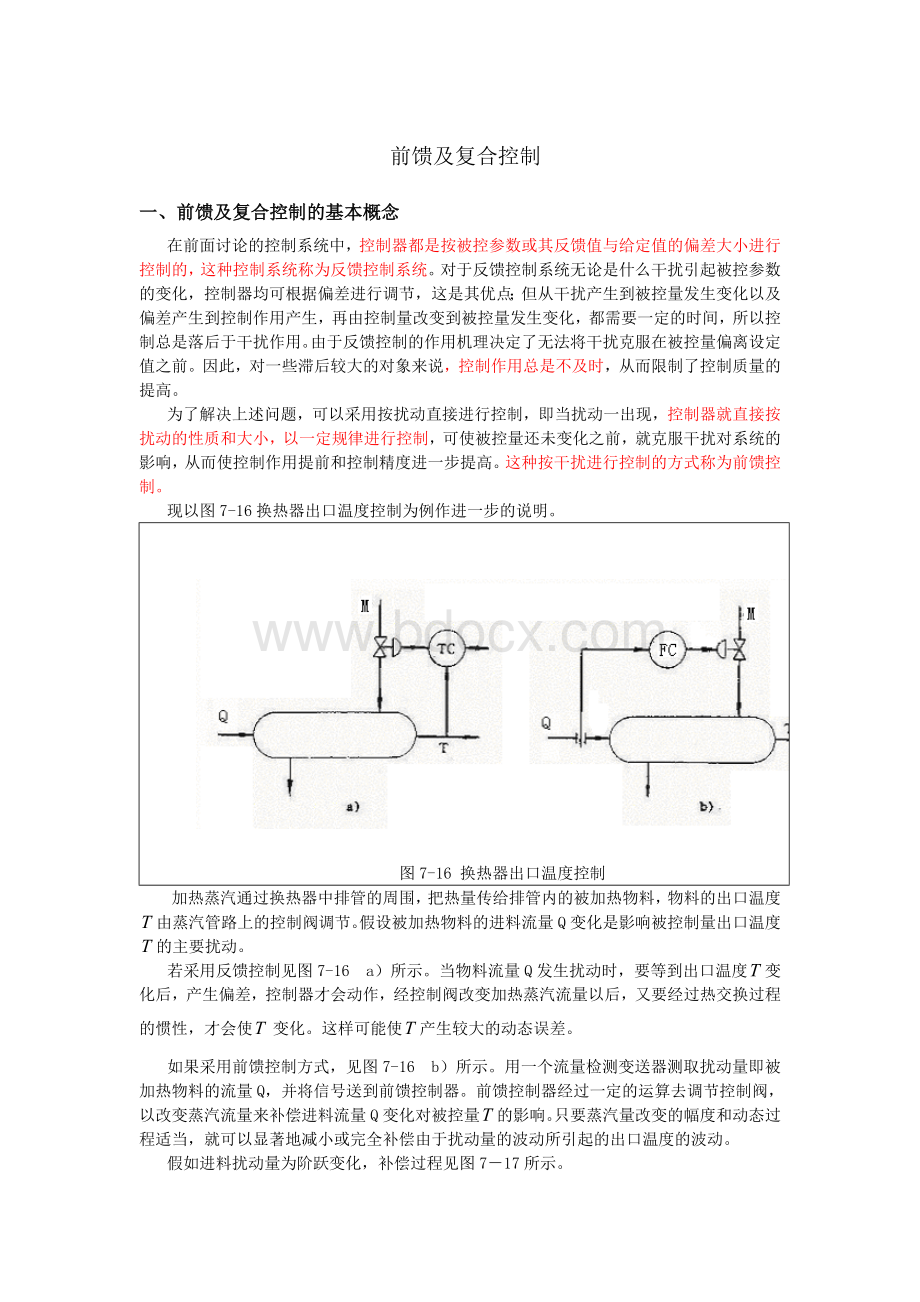
如果采用前馈控制方式,见图7-16b)所示。
用一个流量检测变送器测取扰动量即被加热物料的流量Q,并将信号送到前馈控制器。
前馈控制器经过一定的运算去调节控制阀,以改变蒸汽流量来补偿进料流量Q变化对被控量的影响。
只要蒸汽量改变的幅度和动态过程适当,就可以显著地减小或完全补偿由于扰动量的波动所引起的出口温度的波动。
假如进料扰动量为阶跃变化,补偿过程见图7-17所示。
图7-17前馈控制系统的补偿过程
图中曲线a为不加控制时的温度阶跃响应,曲线b是前馈控制作用引起的出口温度变化曲线。
若曲线b与曲线a大小相同,方向相反,则可能实现对扰动量的完全补偿,从而使被控量与扰动量Q完全无关。
从上面的讨论可知,前馈控制作用很及时,当扰动发生以后,不必等到被控量出现偏差就产生控制作用,在理论上可以实现对于干扰的完全补偿。
但是,在一个对象中被控量参数的干扰是多种多样的,如果对所有的干扰都进行前馈补偿,则是不经济的,而且有许多干扰根本无法测定,所以,单纯采用前馈控制方式是有局限性的。
图7-18为前馈控制与反馈控制比较示意图,从中可以看出前馈控制与反馈控制的区别:
1)系统检测信号不同:
反馈控制检测的信号是被控量,前馈控制的检测信号是扰动信号。
2)系统调节的依据不同:
反馈控制基于偏差值的大小;
前馈控制基于扰动量的大小进行控制。
3)产生控制作用的及时性:
反馈控制作用是在被控量反映干扰影响而偏离给定值后才开始调节;
前馈控制作用却发生在被控量偏离给定值之前。
过程对象
调节手段
反馈调节
被调参数给定值
前馈调节
被调参数
可测干扰
‘
图7-18前馈控制与反馈控制比较示意图
4)控制方式不同:
反馈控制是闭环控制;
而前馈控制是一种开环控制。
前馈控制器在扰动量产生控制作用后,对被控量的影响并不反馈回来影响控制器的输入量,因此是开环的。
对于前馈控制系统的方块图可表示为图7-19。
从图中可知:
图7-19前馈控制系统的方块图
从扰动作用F到被控量Y之间有两个通道:
一路是从扰动F通过对象的扰动通道去影响Y;
另一路是从扰动F通过前馈控制器与对象的调节通道去影响被控量,不存在反馈通道。
由于前馈控制的效果不通过反馈加以检验,所以一个合适的开环控制作用,必须要求对被控对象的特性比较清楚。
5)控制规律不同和控制品质差异:
一般的反馈控制系统均系采用通用类型的PID控制器,反馈控制不能使被控量始终保持在给定值上。
而前馈控制是根据对象的特性设计的,对象的不同,前馈控制的规律也不同,所以是一种专用控制器。
前馈控制在理论上可实现最完善的控制,使被控量维持在给定值上。
实现对干扰完全补偿的前馈控制器传递函数可应用不变性原理进行推导。
例见图7-19系统在干扰的作用下的传递函数为
(7-18)
系统对干扰F实现完全补偿的条件是
而 (7-19)
将式(7-19)代入式(7-18)即得
这样前馈控制器的传递函数为
(7-20)
从式(7-20)中可以看出前馈控制器的控制规律取决于对象干扰通道的特性与控制通道的特性之比。
式中负号表示控制作用的方向与干扰作用的方向相反。
(6)实现的经济性与可能性:
反馈控制只要一个控制回路就可以控制各种干扰对被控量的影响;
而前馈控制是开环控制方式,根据一种干扰设计的前馈控制器只能克服这一干扰。
要克服所有干扰对被控量的影响,需要对所有干扰都独立形成一个控制,因而不经济,也不可能。
而且前馈控制要求干扰必须是可以测量的,对于不可测量的干扰量就不能进行前馈控制。
通过以上比较可知,前馈控制和反馈控制各有优缺点。
因此,可以取长补短组合起来构成一个控制系统,即所谓的“前馈—反馈”控制系统。
在两种控制过程中,选择被控对象中的主要干扰,反馈控制最不容易克服的干扰,用前馈控制加以补偿;
而对其它引起被控量变化的各种干扰采用反馈控制加以克服,从而充分利用这两种控制的特点使控制质量进一步提高。
这种把按扰动的前馈控制与按偏差的反馈控制结合起来的系统,就称为复合控制系统。
这种系统即有利于克服系统主要干扰的影响,又可以借反馈来消除其它干扰的影响。
当前馈控制效果不够理想,反馈控制还可以帮助削弱主要干扰对被控量的影响,并且可以消除静差。
通常所说的前馈控制系统就是这样的复合控制系统。
二、前馈控制系统的几种典型结构形式
1.单纯的前馈控制系统
根据对干扰补偿的特点,单纯的前馈控制系统可分为静态前馈控制系统和动态前馈控制系统。
(1)静态前馈控制系统
所谓静态前馈控制系统是指前馈控制器的输出仅是输入的函数,而与时间因子无关。
在许多工业对象中,为了便于工程上的实施,前馈控制器仅以对象的静态放大系数作为校正的依据,其传递函数为
(7-21)
式中—干扰通道的放大系数;
—控制通道的放大系数;
和可用实验的方法获得。
静态前馈控制是前馈控制中最简单的形式,用一般的比例器或比例控制器就可以实现,因此实施方便,在生产中应用比较广泛。
对于只要求稳定工况下对扰动的补偿或干扰通道与控制通道滞后相差不大时,均可获得较好的控制精度。
在干扰作用下静态控制可以使被控量的静态偏差等于或接近于零。
(2)动态前馈控制
静态前馈控制不能保证在干扰作用下,被控量的动态偏差等于或接近于零。
对于动态偏差要求严格的场合,可以采用动态前馈控制,其作用在于力求在任何时刻均实现对干扰的补偿。
动态前馈的补偿过程见图7-17所示。
通过合适的控制规律的选择,使干扰经过前馈控制器至被控量这一通道的动态特性与干扰的动态特性完全一致,并使它们的符号相反,便可以达到控制作用完全补偿干扰对被控量的影响。
此时前馈控制器的传递函数和式(7-20)完全一致。
2.复合控制系统
复合控制系统的结构形式甚多,下面介绍两种典型的结构形式:
前馈-反馈控制和前馈-串级控制。
(1)前馈-反馈控制
在生产过程中,单纯使用前馈控制是很难满足工艺要求的。
从前面的讨论可知,前馈控制的局限性主要表现在:
①实际生产过程中存在各种干扰,对每一个设计前馈控制是不现实的。
而且有些干扰难以测量,就无法实现前馈控制。
②前馈控制的规律与对象的特性有关。
对象特性要受负荷和工况等因素的影响而产生漂移。
这将导致前馈控制的精度下降。
前馈控制又是一个开环控制,没有反馈信号作进一步的修正。
前馈控制的这些弱点,正好可由反馈控制来弥补。
为了充分发挥前馈控制与反馈控制的优点,将两者结合起来,构成了前馈-反馈控制系统。
前馈-反馈控制系统中综合了单纯前馈控制和反馈控制两者的优点,将反馈控制不易克服的主要干扰进行前馈控制,而对于其他干扰进行反馈控制,这样既发挥了前馈校正及时的特点,又保持了反馈控制能克服各种干扰,并对被控量始终给以检测的优点。
因此,目前工程上使用的前馈控制系统,大多数属于前馈-反馈控制类型。
仍以换热器对象为例,当主要干扰为物料流量时,相应的前馈-反馈控制系统及其结构图分别见图7-20和图7-21。
图7-20换热器前馈-反馈控制系统
。
图7-21换热器前馈-反馈控制系统结构图
由图7-20可以看出,当换热器负荷F发生变化时,前馈控制器首先获得此信息,并立即按一定的控制作用改变加热蒸汽量,以补偿F对被控量Y的影响。
同时,对于前馈未能完全消除的偏差,以及未引入前馈的其他干扰如物料进口温度、蒸汽压力等波动引起的Y变化,在温度控制器获得Y的偏差信息后,按PID作用对蒸汽量产生控制作用。
这样一个通道按干扰控制,另一个通道按偏差控制,两种控制作用相叠加,将使Y尽快地回到给定值。
复合控制系统具有以下几个特点:
1)复合控制时,扰动对输出的影响要比纯前馈时小得多
由图7-21可知,干扰F对被控量Y的闭环传递函数为
(7-22)
将式(7-22)与(7-18)比较,即将前馈-反馈控制与单纯的前馈控制相比较,在前馈-反馈控制时,由于反馈控制作用的存在,被控量Y受干扰F的影响要比单纯前馈控制时缩小到分之一。
2)引入反馈控制后,前馈控制中的完全补偿条件不变
应用不变性条件:
F(s)≠0,Y(s)=0代入式(7-22)中,可推导出完全补偿条件的前馈控制器传递函数:
(7-23)
(7-24)
比较式(7-24)和式(7-20)可知前馈-反馈控制方案与前馈控制方案实现完全补偿的条件是相同的。
3)前馈补偿对于系统的稳定性没有影响
从式(7-22)可知,前馈-反馈控制与反馈控制的传递函数分母相同,即系统特征方程不变。
因此,引入前馈控制不会影响反馈控制的稳定性。
在反馈控制系统中控制精度与稳定性是矛盾的。
因而往往为保证控制系统的稳定性而无法进一步提高系统的控制精度。
而前馈-反馈控制系统则具有控制精度高,稳定速度快的特点,因而在一定程度上解决了稳定性与控制精度间的矛盾。
例:
有一个热交换器,要求出口液体的温度Y保持不变,采用复合控制系统见图7-22所示,其各部分的传递函数为:
对象控制通道传递函数:
扰动F作用的对象扰动通道传递函数:
控制阀传递函数:
流量测量变送器传递函数:
温度测量变送器传递函数:
其系统结构图见图7-23所示
图7-22热交换器复合控制系统
图7-23热交换器复合控制系统结构图
图中为反馈控制器传递函数,为前馈控制器传递函数。
根据不变性条件得:
代入已知的传递函数整理得:
(7-25)
从式(7-25)可见,前馈控制器为一个PD控制器
比例带:
微分时间为:
(2)前馈-串级控制系统
分析图7-20所示的换热器前馈-反馈控制系统可知,前馈控制器的输出与反馈控制器的输出叠加后,直接作用在控制阀上。
由于前馈控制是一种开环控制方式,为了保证前馈控制的精度,对于控制阀提出了严格的要求,希望其灵敏、线性和具有尽可能小的滞环区。
此
 升级会员
升级会员 