车牌识别图像处理过程总结Word文档格式.docx
《车牌识别图像处理过程总结Word文档格式.docx》由会员分享,可在线阅读,更多相关《车牌识别图像处理过程总结Word文档格式.docx(15页珍藏版)》请在冰豆网上搜索。
●几种常见的边缘检测算子
●适用于车牌的边缘检测算子
一、车牌识别系统结构
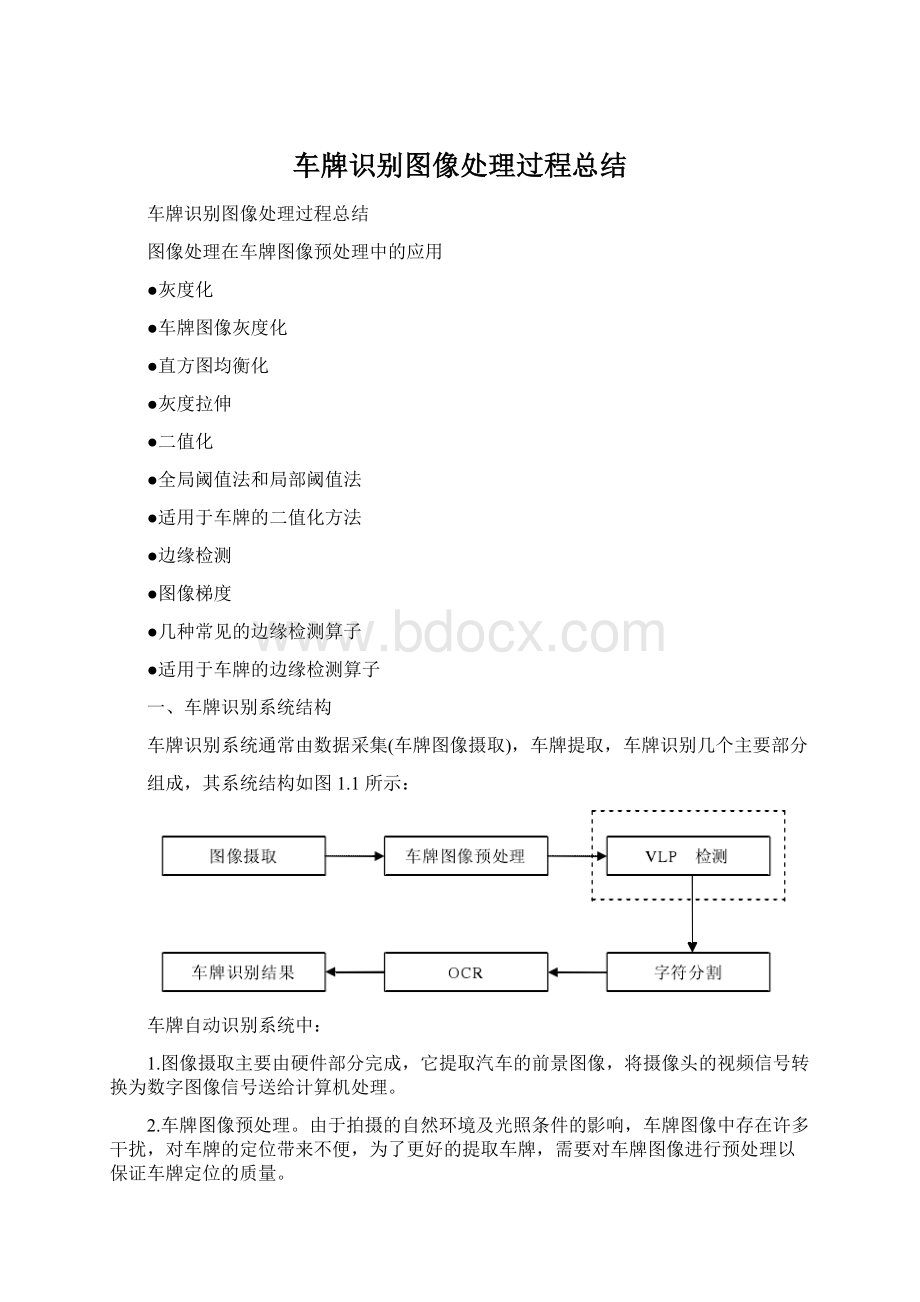
车牌识别系统通常由数据采集(车牌图像摄取),车牌提取,车牌识别几个主要部分
组成,其系统结构如图1.1所示:
车牌自动识别系统中:
1.图像摄取主要由硬件部分完成,它提取汽车的前景图像,将摄像头的视频信号转换为数字图像信号送给计算机处理。
2.车牌图像预处理。
由于拍摄的自然环境及光照条件的影响,车牌图像中存在许多干扰,对车牌的定位带来不便,为了更好的提取车牌,需要对车牌图像进行预处理以保证车牌定位的质量。
3.VLP检测。
即图1.1中虚线环绕的部分,这一部分是系统的核心,它的实现影响着整个系统的性能,主要利用模式识别、数字图像处理、信息论等知识对车牌图像中的车牌进行定位及提取操作。
4.字符分割及识别。
当车牌被成功提取后,需要分割其中的字符,并利用先验知识对其进行识别,以得到最终结果。
率,而直方图均衡化则是通过某种变换,得到一幅具有均匀灰度密度分布的新图像。
其结果是扩展了图像的灰度取值范围,从而达到增强图像对比的效果。
设原始灰度图像的像素数目为N,那么,直方图均衡化的具体计算步骤如下:
直方图均衡化的结果如图2.5-2.8所示,可以看出经过均衡化处理后图像的对比度得到了增强,直方图中的灰度函数分布基本平均。
2.1.3灰度拉伸
由于直方图均衡化是对图像中已经存在的像素值进行平均,那么图像中出现较多的像素级就在均衡过程中起到了主要贡献作用。
相对灰度级出现较少,图像灰度处于极端的情况而言,我们需要图像的像素值在各个灰度级都有均匀分布(包括原图中不曾出现的灰度级),灰度拉伸可以达到这个效果,从而起到增强图像对比的作用。
如果造成图像的对比度不足,主要原因在于拍摄目标的远近不同,使得图像中央区域和边缘区域的灰度失衡,或是由于摄像头在扫描时各点的灵敏度有较大差异而导致图像失真,或是由于曝光不足(或过度)致使图像的灰度值大小被限制在一个很窄的范围内。
这时的图像模糊不清,似乎没有灰度层次。
假设原图像f(x,y)中,大部分像素的灰度级在一个较窄的范围[a,b]内,又或者我们只对灰度级在某个范围内的像素感兴趣,经过线性灰度变换后,可以将这一灰度范围[a,b]扩展到新图像g(x,y)中一个比较大的灰度范围[c,d]。
并且有。
f(x,y)和g(x,y)的变换公式如下:
从灰度直方图分析,由于新图像的灰度范围变大,所以对数字图像来说,尽管变换前后像素的个数不变,但不同像素的灰度差变大,增强了图像的对比度。
同时,这种两端截取式的变换使小于灰度级a和大于等于灰度级b的像素分别直接变为c和d,将会造成部分信息的丢失。
因此,可以采用分段线性灰度变换以减少信息的丢失,将图像灰度分成两个以上的区间分别进行线性变换。
这种方法的优点在于可以根据需要来拉伸感兴趣的灰度范围,相对抑制不感兴趣的范围。
分成三段进行灰度变换的公式如下:
公式对灰度范围[a,b]进行了灰度扩展,而对灰度范围[0,a]和[b,m]进行了压缩。
通过调整折线拐点的位置和分段直线的斜率,可以对任意灰度范围进行扩展或压缩。
利用某些非线性函数,例如对数函数、指数函数等作为变换函数,可实现图像的非线性变换。
对数变化一般为:
其中a、b和c为可调参数,用于调整曲线的位置和形状,它使图像的低灰度区得以扩展,而高灰度区得以压缩。
与之对应的指数变换一般为:
其中a、b和c同样为可调参数,用于调整曲线属性。
它的效果与对数变换的效果相反:
扩展了图像的高灰度区,压缩的图像的低灰度区。
利用对数函数进行灰度变换在实际应用中有重要意义,它能扩展低灰度区,符合人们在视觉上的主观感觉。
如图2.9-2.12所示,可以看出经过灰度拉伸处理后的图像的灰度分布区域由(0,200)变换到另一个区域(128,255),图像的亮度明显增大。
2.2二值化
一幅灰度图像的亮度信息由256个灰度级组成,它能够呈现较为丰富的明暗度。
当我们识别车牌时,需要把目标从背景中彻底分量出来。
为了尽可能少地减少背景像素干扰,常常直接把图像分为目标和背景两部分。
这样我们只能用两个灰度级:
0和1。
通常目标像素值为1,背景像素值为0。
要得到这种黑白分明的图像,我们需要对图像进行二值化。
设图像二值化前的像素值为f(x,y),其中(x,y)表示图像的空间点坐标,变化后的像素值g(x,y)为:
其中c为我们所说的阈值。
目前,在车牌识别系统中常用的灰度二值化算法主要包括全局阈值法和局部阈值法等。
并且出现了一些针对车牌图像的特殊二值化算法。
由于上文介绍了图像的灰度化变换,所以下面将逐一介绍基于灰度的三种阈值法算法。
2.2.1全局阈值法和局部阈值法
顾名思义,全局阈值法就是从图像的整体角度出发,计算图像的单一阈值的方法,主要有迭代法和Otsu法等,这里我们介绍Otsu法。
Otsu法是常用的一种阈值选取方法,这是一种类间方差阈值法,它是在最小二乘函数的基础上推导出来的。
基本思想是:
取一个阈值k,将图像中的像素按灰度值分为大于等于k和小于k两类,也就是我们所说的目标和背景两类。
求出两类像素的方差和总体方差。
然后给定三个分离指标:
任取其中一个,这里我们取第一个分离指标Q1,找出使其值最小的k即为最佳阈值。
其意义是使不同种类的方差最大,相同种类的方差最小。
用P(i)示图像各灰度级的频数,则阈值的计算步骤为:
各参数的计算公式分别如下:
4.令k=k+1,重复计算上一步,直到k取到最大灰度级
maxk;
5.找出令分离指标
Q1最小的k值,该值为最佳阈值。
局部阈值法则是针对灰度图像中的每一个像素点进行计算的。
它将图像分块,为每一块选取一个阈值进行分割,如果某块内同时有目标和背景,则直方图呈明显双峰状态,可定出局部阈值;
如果一块内只有目标或背景,那么直方图不呈双峰,但可根据邻近有双峰区域的阈值通过内插而得到这一区域的阈值。
局部阈值法的难点之一是判断直方图是否存在双峰。
一种较为直观的方法是:
如果某一块只有目标或背景,那么它的差分值就比较小。
算法设计如下:
由于全局阈值法是从图像的整体角度出发计算单一阈值,因而计算时间较短,适用于目标与背景存在较大对比度的图像;
而局部阈值法则是逐个计算图像中的每个像素灰度级,保存了图像的细节信息。
相比全局阈值法来说,它的计算时间较长,计算量较大,但适用于背景信息丰富的图像。
2.2.2适用于车牌的二值化方法
由于车牌图像的特殊性,它包含的信息一般要少于普通的图像,综合考虑全局阈值法和局部阈值法的优缺点,可以得到一种比较适合车牌图像的二值化方法。
实际处理中,由于光照不匀、灰度级动态范围太窄和车辆牌照污损等原因影响,致使车牌的质量退化,常存在严重的伪影和模糊的字符边缘,因而极大影响了车牌图像的二值化效果。
而将牌照图像的空间分布特征[21]与最大类间方差的统计特征相结合后,不仅能消除不均匀光照引起的伪影,还能减少笔画出现断裂现象的几率,二值化效果较好。
假定牌照图像中字符像素所占比例为
R1,背景像素所占比例为R2,则0<
R1,R2<
1且R1+R2=1。
该灰度图像像素均值为:
2.3边缘检测
数字图像的边缘检测是图像分割、目标识别、区域形状提取等图像分析领域十分重要的基础。
边缘是图像的重要特征,图像理解和分析的第一步就是边缘检测。
在车牌识系统中,车牌区域存在大量的边缘信息,这是车牌区域不同于其它区域的一个重要特征。
因此,边缘检测对于车牌识别非常重要。
所谓边缘,就是指其周围像素值的变化呈现阶梯状或屋顶状的像素的集合,它存在于目标与背景、目标与目标、区域与区域、基元与基元之间。
边缘反应了空间频率的变化,是图像分割的重要特征,也是纹理信息形状特征的基础。
所以,我们要把车牌从图像中分割出来,就要找到车牌区域与其它区域之间的边缘,从而进行图像分割。
由于边缘处于两个不同区域之间,所以边缘具有方向和幅度两个特征。
沿边缘走向,像素值的变化平缓;
而垂直于边缘走向,像素值的变化明显。
它的存在相当于函数中的转折点或拐点,因而边缘上像素值的一阶导数较大,二阶导数为零。
2.3.1图像梯度
在介绍边缘提取方法之前,先引入图像梯度的概念。
对于图像f(x,y),它在点(x,y)处的梯度定义为一个矢量:
综上所述,这一章主要介绍了数字图像处理在车牌预处理方面的一些应用,包括输入图像的灰度化、二值化、噪声处理和边缘提取等。
图像预处理是车牌识别系统中非常重要的一个环节,它的好坏直接影响了二值化的质量,对整个系统的精度也有着深远的影响。
 升级会员
升级会员 