控制工程基础习题答案Word文档格式.docx
《控制工程基础习题答案Word文档格式.docx》由会员分享,可在线阅读,更多相关《控制工程基础习题答案Word文档格式.docx(65页珍藏版)》请在冰豆网上搜索。
(5).
2-6.试求下列函数的拉氏反变换。
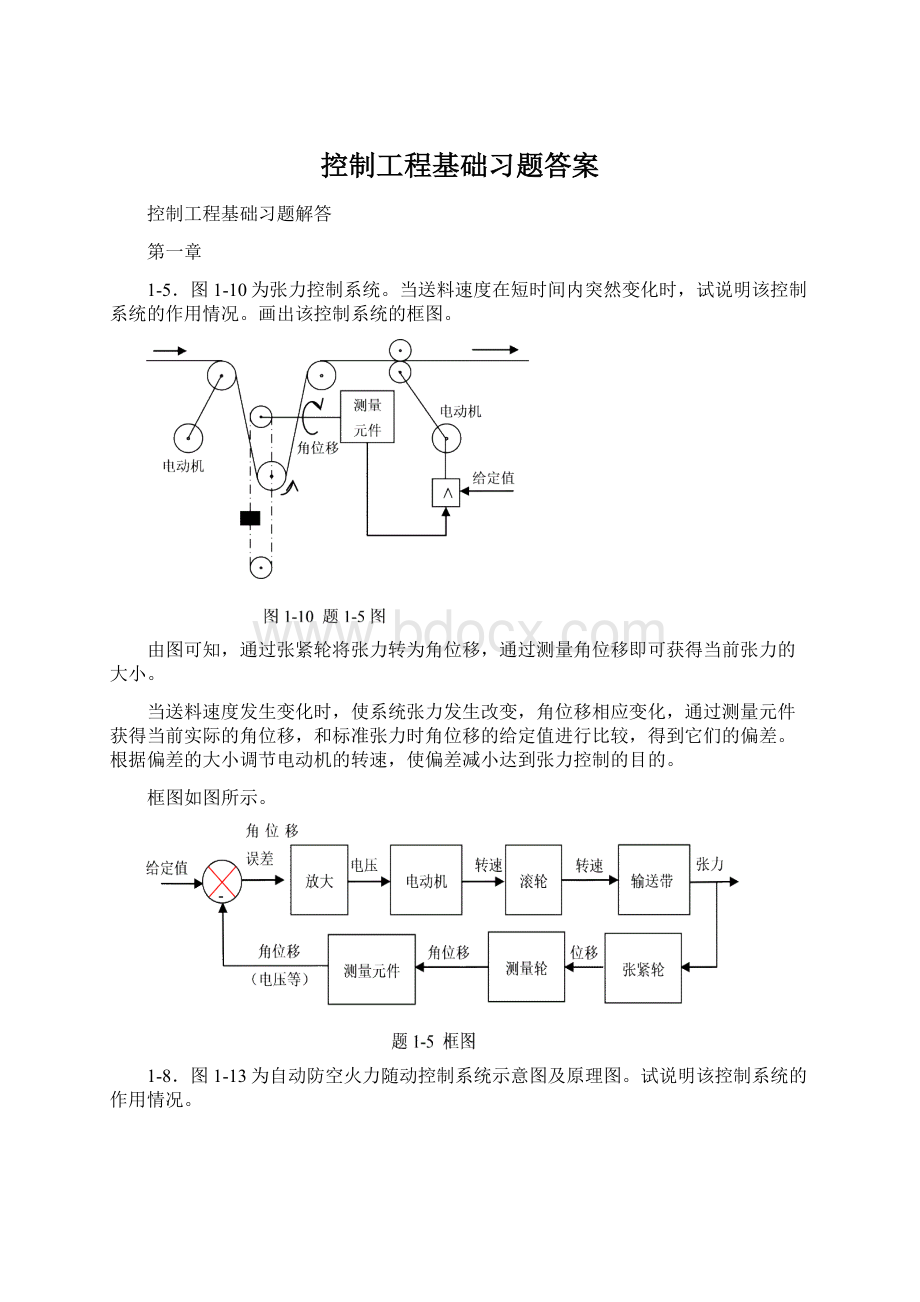
(4).
(8).
2-13试求图2-28所示无源网络传递函数。
b).用等效阻抗法做:
拉氏变换得:
传递函数为:
2-16试求图2-30所示有源网络传递函数。
2-17.组合机车动力滑台铣平面时,当切削力Fi(t)变化时,滑台可能产生振动,从而降低被加工工件的切削表面质量。
可将动力滑台连同铣刀抽象成如图所示的质量-弹簧-阻尼系统的力学模型。
其中m为受控质量,k1,k2分别为铣刀系统,x0(t)为输出位移。
试建立数学模型。
微分方程为:
传递函数为:
2-25.试求图2-39a所示机械系统的传递函数,画出其函数框图,与图2-39b进行比较。
解1:
解2:
画出框图如图所示,通过框图简化可得传递函数为:
2-28.化简图2-42所示各系统框图求传递函数。
c).
第三章
3-2.假设温度计可用1/(Ts+1)传递函数描述其特性。
现用该温度计测量某容器中的水温,发现经1min后才能指示出实际水温的96%,问:
(1).该温度计的指示从实际水温的10%变化到90%所需的时间是多少?
(2).如果给该容器加热,使容器内水温以0.1℃/s的速度均匀上升,当定义误差e(t)=r(t)-c(t)时,温度计的稳态指示误差有多大?
(1).设实际水温为Tr,温度计原来处于T0=0度,当温度计放入水中时,相当于输入一阶跃值为Tr-T0=Tr的阶跃函数,温度计的时间响应函数为:
根据题意可得:
即可得:
T=18.64(s),
10%所需的时间为,。
90%所需的时间为,。
所以可得该温度计的指示从实际水温的10%变化到90%所需的时间(上升时间)是
(2).由题可知系统为一阶系统,故系统稳定,为求当r(t)=0.1t时的稳态误差,由一阶系统的时间响应分析可知,单位斜坡响应的稳态误差为T,所以稳态指示误差:
(将1/(Ts+1)转化为开环传递函数为1/(Ts)时的单位反馈系统,则可见此时系统的误差为e(t)=r(t)-c(t)。
根据系统为I型,可得稳态速度误差系数为Kv=K=1/T,得当输入信号为r(t)=0.1t时的稳态误差为
)
3-5.某控制系统如图3-24所示,已知K=125,试求:
(1).系统阶次,类型。
(2).开环传递函数,开环放大倍数。
(3).闭环传递函数,闭环零点、极点。
(4).自然振荡频率ωn,阻尼比ζ,阻尼振荡频率ωd。
(5).调整时间ts(△=2%),最大超调量σp%。
(6).输入信号r(t)=5时,系统的输出终值c(∞)、输出最大值cmax。
(7).系统的单位脉冲响应。
【系统的单位阶跃响应】
(8).系统的单位斜坡响应。
【讨论系统单位阶跃响应出现超调、衰减振荡、无超调三种情况下的K值】
(9).静态误差系数Kp、Kv、Ka。
(10).系统对输入为r(t)=5+2t+t2时的稳态误差。
(1).系统的开环传递函数:
,可见系统阶次为二阶,类型为I型。
(2).开环传递函数,开环放大倍数为1.5625
(3).闭环传递函数为:
,闭环没有闭环零点,闭环极点为:
(4).,,
(5).,
(6).因为标准型二阶系统单位阶跃信号的稳态输出为1,最大值为1+Mp=1+σp%=1.015,由于线性系统符合叠加原理,所以可得:
*5=25,cmax=5*5*1.015=25.375
(7).由于标准型欠阻尼二阶系统的单位阶跃响应为:
所以系统单位阶跃响应为:
利用线性系统的重要特征即可得单位脉冲响应:
【由于标准型欠阻尼二阶系统的单位阶跃响应为:
】
(8).同理可得单位斜坡响应:
积分常数C由初始状态为零的条件而得,即
可得C=-3.2,所以单位斜坡响应为:
【闭环传递函数为
可得
超调:
,得
衰减振荡:
无超调:
,得,又系统稳定,所以】
(9).由于系统为I型,所以其静态误差系数分别为:
Kp=∞
Kv=1.5625
Ka=0
(10).系统对输入为r(t)=5+2t+t2时的稳态误差为:
系统是二阶系统,开环传递函数中的系数均大于零(或由闭环传递函数中可知极点的实部小于零),所以系统稳定
3-16.已知开环系统的传递函数如下(K>
0),试用罗斯判据判别其闭环稳定性,并说明系统在s右半平面的根数及虚根数。
(1).
(6).
(1).特征方程为
当K>
0时,则第一列的符号全部大于零,所以闭环稳定,系统在s右半平面的根数及虚根数均为0。
(6).特征方程为
0时,第一列有一个数小于零,所以闭环不稳定;
第一列符号变化了两次,系统在s右半平面的根数为2;
第一列没有等于0的数,虚根数为0。
3-19.单位反馈系统的开环传递函数为,试求:
(1).系统稳定的a值;
(2).系统所有特征根的实部均小于-1之a值。
(3).有根在(-1,0)时之a值。
闭环传递函数为
(1).用罗斯判据可得:
系统稳定,则应:
,即a值应为:
(2).令,即,此时当时,则。
对闭环传递函数进行变换得:
,此时,。
即a值应为:
(3).由
(1)和
(2)可得,此时a应在(0,1.2)和[3,8)之间。
3-27.已知系统的结构如图3-34所示。
(1).要求系统动态性能指标σp%=16.3%,ts=1s【tp=1s】,试确定参数K1、K2的值。
(2).在上述K1、K2之值下计算系统在r(t)=t作用下的稳态误差。
系统的开环传递函数为:
系统的闭环传递函数为:
得:
5%时:
,则:
,由系统传递函数可知,系统稳定K1应大于零,所以
此时:
2%时:
【
得
所以:
(2).系统的开环传递函数为:
系统是二阶系统,闭环(或开环)传递函数中的系数均大于零(或由闭环传递函数中可知极点的实部小于零),所以系统稳定
系统为I型
当,时
开环放大增益为:
【,
得开环放大增益为:
第四章习题答案
4-2.设开环系统的零点、极点在s平面上的分布如图4-15所示,试绘制根轨迹草图。
图4-15题4-2图
4-3.已知单位反馈系统的开环传递函数如下,试绘制当增益K1变化时系统的根轨迹图。
(2).
(1).开环极点为
无有限开环零点。
示如图
法则2:
有三条趋向无穷的根轨迹。
法则3:
实轴上的根轨迹:
0~-2,-5~-∞。
法则4:
渐近线相角:
法则5:
渐近线交点:
,得渐近线如图示。
法则6:
分离点:
得:
,
其中为实际分离点,
分离角为:
。
如图示。
法则8:
虚轴交点:
令代入特征方程,得:
综上所述,根轨迹如图红线所示。
开环极点为
开环零点为。
有1条趋向无穷的根轨迹。
-2~-∞。
其中为实际分离点,分离角为:
法则7:
出射角:
法则1:
对称性可得:
4-9已知某单位负反馈系统的开环传递函数为
(1)系统无超调的K1值范围。
(2)确定使系统产生持续振荡的K1值,并求此时的振荡频率
(3)【判断s=-1.5+j3.12是否在根轨迹上?
若在,求另外两个根及对应的K1值。
(4)闭环极点都在σ=-1左侧的K1值范围。
(1)分离点:
此时。
(2)虚轴交点:
画系统的根轨迹,如图示。
由根轨迹图可得:
(1)系统无超调的K1值范围为保持所有根轨迹在负实轴时(分离点之前的部分),即。
(2)确定使系统产生持续振荡的K1值为与虚轴交点时,即。
此时的振荡频率为无阻尼自然频率,即闭环极点的虚部:
(3)【若s=-1.5+j3.12在根轨迹上,则应满足相角条件。
即∠G(s)H(s)=±
180º
(2q+1).
所以满足相角条件,是在根轨迹上。
由于复数根应共轭,所以另外一个根为:
s2=-1.5-j3.12
又由于分子的阶次低于分子的阶次超过了二阶,所以闭环特征方程的根的和应等于开环极点的和。
即:
s+s2+s3=0+(-5)+(-9)=-14
得第三个根为:
s3=-14-s-s2=-11
根据幅值条件可得此时对应的K1值为:
(4)由根轨迹图可知,在-9左边的一条根轨迹的实部在整个K1的取值范围内均满足实部小于-1
在实轴[0,-5]之间存在一个最小的K1,其值为当s=-1时的值。
另外在复平面上还有一个最大的K1,其闭环极点为s1,2=-1±
jω,此时对应的第三个闭环极点s3=-14-s1-s2=-12
即闭环极点都在σ=-1左侧的K1值范围为:
4-10设单位负反馈系统的开环传递函数为
(1)试绘制根轨迹的大致图形,并对系统的稳定性进行分析。
(2)若增加一个零点z=-1,试问根轨迹图有何变化,对系统的稳定性有何影响。
(1)画系统的根轨迹,如图红线所示。
其中:
分离点在原点处,分离角为:
可见系统除在K1=0时处于
 升级会员
升级会员 